地面三维激光扫描技术在山区水利工程测绘中的信息提取研究
2019-06-25 08:57:46罗天文
中国农村水利水电 2019年6期
徐 锐,罗天文
(贵州省水利水电勘测设计研究院,贵阳 550002)
自世界上第一台三维激光扫描仪开发问世到现在,已近有十多年的时间,随着仪器制造技术的不断进步,以及各行各业的科研及工程人员的不断实践,三维激光扫描仪已经非常先进,被广泛应用于测绘、采矿、工程建设、城市规划、交通、文物等行业中[1-4]。在测绘工作中,三维激光扫描技术为地形测绘和地质研究提供了一种新的工具和手段,是一种非接触式主动测量方法,可进行大面积、高密度空间三维数据的采集[5],具有测量点位精度高、采集空间点的密度大、速度快等特点,使测绘从传统的单点采集方式变为高密度、连续、自动获取方式,增加了信息量,提高了工作效率,是继空间定位技术(GPS)后的又一项测绘技术革新。
但是,由于其工作原理是通过主动发射激光,打到被测物体后接收反射回的激光形成三维点云[6]。从测绘工作者的角度上看,是一种可见即可得的工作原理,这使得三维激光扫描仪在有地物遮挡的情况之下,作用明显降低。然而,贵州省地处西南地区,地表植被、农作物覆盖面广,且水利水电项目都处于崇山峻岭之中,这更加大了利用三维激光扫描仪进行测绘的难度。同时,对于测绘工作者来说,要将三维点云的数据通过提取地物信息的方式来生产数字线画图(DLG),内业数据处理工作量非常巨大,目前没有一款很好的软件能够解决这一问题,这就造成了地面三维激光扫描技术在贵州省的水利水电勘测设计行业甚至其他行业中的应用非常少,很多有设备的单位都是在西北、西藏等地表植被稀少的地方使用。由于该设备价格不菲,如果不能提供其内业数据处理效率的话,很难在我国南方地区进行推广应用。
目前,国内外一些仪器生产厂商配套的数据处理软件中,自带了简单的植被过滤和地物特征提取的功能[7]。从实践工作中发现,这些功能还不能完成满足贵州山区测绘精度的需要。例如,奥地利RIEGL公司RISCAN PRO软件的地物特征提取的功能只适用于一些城市中规则建筑物轮廓线的自动提取,对于贵州山区测绘项目中的地物,特别是对于一些不规则的地物就束手无策,例如土坎、地类界、山崖等。常规的做法都是内业人员采用人工的方式在三维点云数据里面手动提取,这是一项非常繁琐的工作,并且由于三维空间二维空间的区别,在采集地物特征过程中,错误率非常高,严重降低了测绘工作效率。
因此,本文的研究目的,是针对贵州省的特殊地形对三维激光扫描技术中的信息提取方法进行研究,一旦解决了这个问题,三维激光扫描仪将在贵州乃至其他南方省份得到很好的推广和运用,具有很可观的应用前景和社会经济效益。
1 半自动化地物提取
利用三维激光扫描仪进行地形图测绘,遇到的最大的阻力就是如何在点云数据中快速高效的提取地物信息,这是国内外研究的热点[8-10],但是目前还没一款专门针对测绘研制的三维激光点云软件,因此,我们在实践中做了很多实验,尝试提高地物提取的工作效率,以下就是使用Riscan Pro软件及Microstation V8i软件通过人工干预的方式提取地物,例如房屋、土坎、河流、地类界、公路、电线等。所采用的技术路线如下。
(1)在存在Riscan Pro软件狗的情况下,可以利用Riscan Pro软件中提取地物,因为Riscan Pro软件中三维浏览、操作很容易,易取到地面点,就能利用这些节点坐标数据参与生成等高线。
在Riscan Pro提取地物时,要注意地物应该分类命名,比如土坎命名为tukan,房屋命名为fangwu,独立坟命名为fen等,同种地物统一命名,这样可通过FME软件将它们的属性正确统一到南方CASS里面,不用再到南方CASS里面更改属性,如图1和图2所示。
图1 Riscan Pro中提取土坎
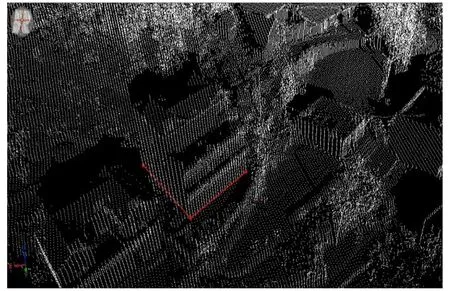
图2 Riscan Pro中提取房屋
通过Riscan Pro软件将提取的图块导出成dxf格式,打开可以看到这些多段线是三维多段线,可用利用FME编写应用程序(如图3所示)实现将三维多段线中的节点坐标数据转换为南方CASS的展点数据和二维多段线并且利用其地物名将其分配到南方CASS里正确的图层。再把生成的坐标数据展到图中,生成成果如图4所示。
图4 利用FME实现坐标数据提取和分层后结果
(2)在无软件狗的情况下,可利用Microstation V8i软件提取地物,因为Microstation V8i软件中三维浏览、操作点云不是太方便,有植被时不易取到地面点,这样造成提取的地物上存在非地面点,故而不能利用这些节点坐标数据参与生等高线,图5所示是在Microstation V8i中提取土坎。当然,可以对原始点云适当去除植被以后(设置参数可轻微去除植被而不会对坎上的特征点造成过滤),再导入Microstation V8i里面提取地物这样绝大部分也能取到地面点,并且这些地物上的节点可以选择性的参与生线。

图5 Microstation V8i里面提取地物图
(3)Riscan Pro和Microstation V8i中不提供南方CASS里面的图示,所以注意不同地物分层绘制,方便后期转换。对于有方向的线状地物(比如土坎)绘制时注意在各自软件中的画线方向,坎向应该在画线前进方向左侧,后期转换在南方CASS里面就可不用改变坎向,直接赋予属性及更改线型。
2 田坎自动化提取
2.1 所采用的技术路线
由于在三维点云数据中如何自动化、高效地提取并编绘地物信息,目前的办法不多。一些软件中对地物特征提取和编绘的功能只适用于一些城市中规则建筑物轮廓线、道路的自动提取等[11-13],对于贵州山区测绘项目中的地物,特别是对于一些不规则形状的地物就束手无策,例如土坎、地类界、山崖等。常规的做法都是内业人员采用人工的方式在三维点云数据里面手动提取和编绘,这是一项非常繁琐的工作,并且由于三维空间二维空间的区别,在采集地物特征过程中,错误率非常高,严重降低了测绘工作效率。
在贵州山区的地物中,尤以梯田、土坎特别多见,利用三维激光扫描仪进行测图时,要花大量的时间来提取坎的特征线。而这些高坎较其他不规则地物又有一定的规律可循,例如,田坎的高程会有突变,且田坎呈一定的形状、密度进行分布等特征。目前,国内外还没有一种专门针对山区田坎、土坎自动提取与编绘的方法。
为了能够在三维点云中自动编绘田坎边界,针对山区田坎的基本特征,利用一种新的基于概率论的三维空间聚类算法,提出了一种在三维点云中自动编绘山区田坎的方法,如图6所示。
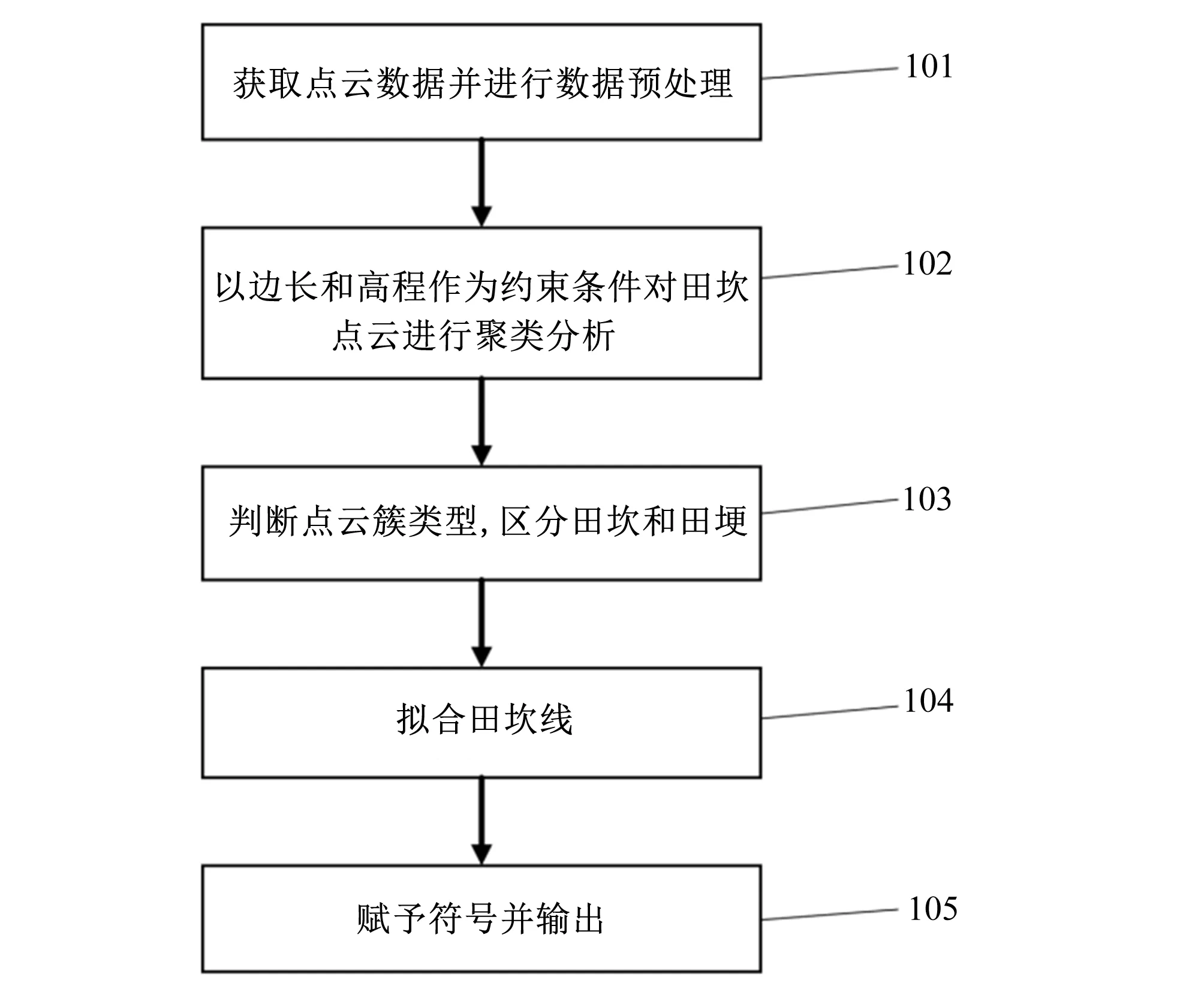
图6 田坎自动提取算法流程图
该方法具体技术方案如下:①获取山区野外点云数据,并进行数据预处理;②以Delaunay三角网边长和顶点高程作为约束条件,利用基于概率论的三维空间聚类方法,对三维点云数据进行空间聚类;③判断点云簇类型,区分田坎和田埂;④将坎顶点连接成线,按照一定的规则进行拟合;⑤赋予田坎或田埂符号并输出。
(1)数据预处理。数据预处理具体包括以下步骤:①点云数据拼接;②通过现场布置发射片的方式,赋予点云三维坐标信息;③去除地表植被和噪点;④对点云数据按照一定密度过滤;⑤将点云数据转换成DNG格式。
(2)空间聚类。利用基于概率论的三维空间聚类方法,对点云数据进行空间聚类的步骤,具体包括:①对所有点云Pi进行检索,比较Pi与其一阶临近点PN之间的高程之差ΔHi,如果高程之差满足以下条件:ΔHi>Ht;ΔHi有正有负;两点之间边长临近正态分布平均边长,则判定此点为坎中点。其中Ht表示山区田坎最低高差;②删除所有坎中点,将剩余点云构建Delaunay三角网;③求出三角网的正态分布平均边长ND_Mean_Distance;④根据正态分布平均边长准则从三角网中删除长边;⑤比较被删除长边的相邻两顶点的高程,将高程大的点判断为田坎顶点,将高程小的点判断为田坎底点。
(3)判断点云簇类型。判断点云簇类型,区分田坎和田埂,具体步骤包括:①对三角网中的点云Pi进行检索,比较Pi与其周边点PN之间的高程之差Hi,如果Hi都为正,判定此点为坎顶点;②根据坎顶点和坎底点的高差将高差在(Ht~25 cm)之间判断为田埂,其他判断为田坎。
(4)拟合田坎线。上述方案中所述的将坎顶点连接成线,按照一定的规则进行拟合,具体步骤包括:①将各自的坎顶点连接成线;②根据最小二乘原理进行拟合。
(5)赋予符号并输出。上述方案中所述的对拟合后的田坎线赋予符号,并输出,具体步骤包括:①对田坎和田埂分布赋予符号,根据田坎的坎顶点和坎底点,判断田坎符号方向;②输出。
2.2 实验结果
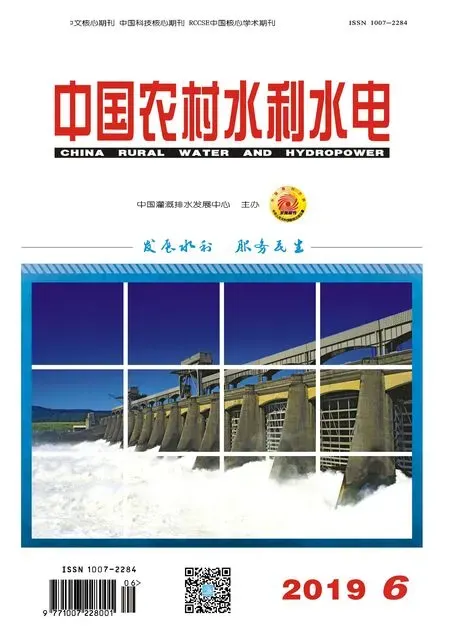
为了验证该方法的可行性,开发了一套三维点云自动提取地物信息的软件,该软件的开发语言及环境为:C语言,VS2010,las开源数据库,FME2015等。图7~图10是各种地形的试验结果,从实验结果上来看,这种方法对山区田坎地物的提取效果非常明显,值得推广应用。

图7 三维扫描仪点云三角网
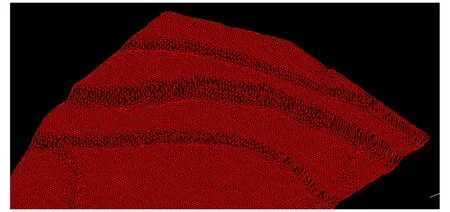
图8 无人机点云三角网

图9 田坎聚类结果

图10 田坎自动提取结果
3 结 语
本文针对贵州山区地物的特点,基于三维激光扫描仪的工作原理,在利用三维激光扫描仪进行地区提取的日常工作中,总结出了一些半自动的地物提取方法,很好地提高了工作效率,同时在这些工作的基础上,借助空间聚类理论,提出了一种新的能够自动提取山区地物(主要针对田坎)的方法,该方法经过试验论证,取得了良好的效果,具有较大的推广应用价值。
猜你喜欢
艺术品鉴(2019年12期)2020-01-18 08:46:52
当代县域经济(2019年9期)2019-10-08 03:25:38
小太阳画报(2018年7期)2018-05-14 17:19:28
作文大王·笑话大王(2018年1期)2018-01-27 18:38:32
作文大王·笑话大王(2016年11期)2016-12-02 11:17:48
小学生优秀作文(低年级)(2016年11期)2016-08-22 03:02:02
湖南城市学院学报(自然科学版)(2016年4期)2016-02-27 14:02:34
作文大王·笑话大王(2015年12期)2015-05-30 10:48:04
现代营销·经营版(2015年3期)2015-04-20 06:46:58
现代营销·经营版(2013年5期)2013-05-14 14:55:04