
浅议六自由度焊接机器人的轨迹规划与运动仿真
2019-06-22 02:01肖宇星
时代农机 2019年4期
肖宇星,祁 蕾
(石河子职业技术学院,新疆 石河子832000)
我国现代化工业的迅猛发展,使焊接技术在现代工业中发挥着越来越重要的作用,其作为金属热加工技术中的重要组成部分,被广泛应用于工业生产的各个相关领域。与此同时,焊接机器人在各个领域中的应用也变得越来越广泛,对于焊接机器人来说,只有对其运动轨迹进行合理的规划,才能为焊接作业质量带来可靠保证。通过对焊接机器人进行轨迹规划,可实时控制机器人的运行速度,从而确保其各个关节能够始终在足够的运动空间中进行,进而减少焊接机器人在运动过程中出现的磨损与振动,实现其运动轨迹的光滑、平稳及连续,从而使焊接机器人能够在工业生产中发挥更大的作用。目前,越来越多的专家与学者都对工业机器人的轨迹规划问题进行了研究,C.Y.Ho等人便试图通过三次多项式与四次多项式来解决工业机器人的轨迹规划问题,不过研究结果证明,仅仅采用三次多项式,是无法对工业机器人的加速度曲线进行光滑处理的。而我国学者刘松国等人,则试图通过七次样条曲线来实现工业机器人的轨迹规划,进而获得了较为光滑的加速度曲线,不过在轨迹规划过程中却因高次插值问题而造成“龙格”现象的频繁出现。为此,文章将六自由度工业焊接机器人的轨迹规划及运动仿真进行研究,提出一种通过五次多项式来达到其轨迹规划目的的新型方法,并通过MATLAB来对该方法的可行性进行了仿真验证。
1 六自由度焊接机器人的轨迹规划
为了实现对六自由度焊接机器人的轨迹规划,本文通过三次多项式与五次多项式来设置受控参数,以此确定六自由度焊接机器人的关节空间,同时,根据六自由度焊接机器人在运行前的初始位资,利用逆运动学方程来转换其各个关节的运动路径,使其成为相应的关节角,同时通过关节变量来对光滑时间函数进行映射,以此确保其能够从起始点逐渐经过全部路径点,直至到达目标点为止。在六自由度焊接机器人中,其各个关节所具有的时间函数彼此是分离而独立的,因此需要通过单独规划的方法来对不同关节的运动轨迹进行轨迹,不过其总运动时间却是一致的。
1.1 三次多项式
从六自由度焊接机器人的三次多项式方程中可以确定其未知量共有四个,其任意关节在初始与终止时的运动角度分别由θi与θf来表示,其速度为0,依据以上已知信息可对其四个未知量进行求解。其速度函数方程与关节角度函数方程可进行如下表示,即
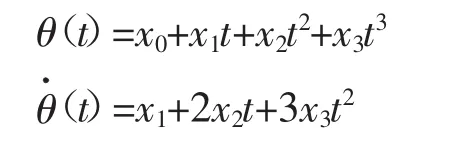
把上述确定的四个已知信息分别代入到关节角度和速度的函数方程中,便可获得其各个系数,即

1.2 五次多项式
从六自由度焊接机器人的五次多项式方程中可确定其未知量共有六个,因此除了已知其某个关节在初始与终止时所具有的速度与角度以外,还应对其在初始与终止时的加速度值进行确定,从而明确了其已知信息共计有6个,然后根据这6个已知信息便可求解方程中的6个未知量,其速度函数方程、关节角度函数方程以及加速度函数方程可进行如下表示,即
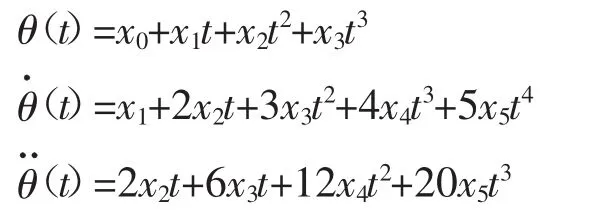
由方程可确定其6个已知条件,分别为θ(ti)=此外,还要确保机器人在运动时所产生的最大加速度应控制在内。
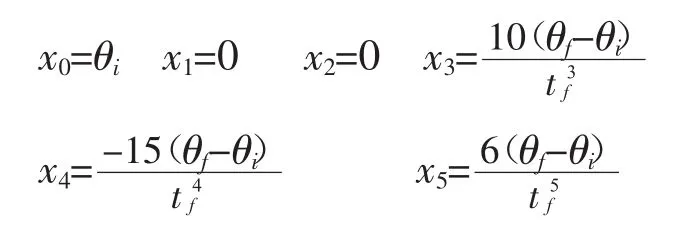
然后将上述已知条件在关节角度、速度以及加速度函数方程中代入,进而获得其各个系数,即
2 逆运动学分析
本文对HP20六自由度焊接机器人进行研究,利用MATLAB对其轨迹规划方法进行仿真验证。文中所阐述的轨迹规划方法,应对其逆运动学方程进行求解,使其所有路径点都能够转换为对应的关节角,因此应对其逆运动学问题进行必要的求解。通过逆运动学可使六自由度焊接机器人在运动时的各个关节点达到指定的位置。逆运动学方程的求解方法主要包括代数法、解析法以及迭代法等,本文运用代数法来求解逆运动学方程,因为该方法较为直观,而且求解结果较为精确,同时,为了便于求解,还运用了MATLAB工具中的矩阵运算来进行求解。
(1)六自由度焊接机器人的运动仿真。已知六自由度焊接机器人在运动之前,其起始点在工作空间中的位置为p1=[510,0,1005],可分别确定其中间点p2与目标点p3,即p2=[415.054,-371.045,889.954]以及p[3760.639,379.705,874.056]。然后对六自由度焊接机器人的逆运动学方程进行求解,可获得六自由度焊接机器人的六个关节所具有的关节角度值,从而明确这六个关节在起始点、中间点以及目标点中所具有的实际位姿情况。
(2)六自由度焊接机器人的运动过程可通过三次多项式以及五次多项式来获得,并明确其位置、加速度以及速度曲线。在采用以上两种方法时,需要将速度在起点和终点时的值设置为0,由此便可获得六自由度焊接机器人在三项多项式与五次多项式时,其六个关节的轨迹曲线。
(3)通过观察三次多项式中六自由度焊接机器人六个关节的轨迹曲线可以了解到,虽然其各个关节无论是在加速度曲线,还是在位置曲线以及速度曲线上,均呈现出连续的状态,不过因其中间点的速度曲线在斜率方面是从负向正转化的,这也造成其加速度曲线突然发生变化,进而导致其曲线不光滑,因此无法通过三次多项式来对六自由度焊接机器人的轨迹进行可靠规划。而通过观察五次多项式中六自由度焊接机器人六个关节的轨迹曲线可以了解到,由于其确定了六自由度焊接机器人在运动时,其速度在起点与终点的值,因此无论是其加速度曲线、速度曲线还是位置曲线,都是非常光滑且连续的,而且能够保证其各个关节在运动过程中所产生的最大加速度能够始终处于可控范围内,从而确保了轨迹规划的连续与稳定。
3 结 语
综上所述,本文利用运动学方程研究了六自由度焊接机器人的轨迹规划问题,通过对逆运动学问题进行求解,明确了三次多项式与五次多项式对六自由度焊接机器人的轨迹规划方法,同时采用MATLAB软件对上述两种轨迹规划方法进行了仿真验证,仿真验证结果表明,相比于三次多项式的轨迹规划方法,五次多项式的轨迹规划方法的应用效果要更佳,通过五次多项式能够获得六自由度焊接机器人中六个关节的角,从而实现插值规划,这样不仅可获得连续而光滑的角速度与角度曲线,而且也能确保其具有光滑而连续的角加速度曲线,进而使六自由度焊接机器人的运行变得更加稳定,大幅削弱了震动作用给机器人造成的不利影响,有效延长了机器人的使用寿命。
猜你喜欢
当代水产(2022年6期)2022-06-29
读友·少年文学(清雅版)(2020年4期)2020-08-24
读友·少年文学(清雅版)(2020年3期)2020-07-24
河北省科学院学报(2020年1期)2020-05-25
重型机械(2019年3期)2019-08-27
汽车观察(2018年12期)2018-12-26
制造技术与机床(2018年11期)2018-11-23
金桥(2018年4期)2018-09-26
劳动保护(2018年8期)2018-09-12
现代装饰(2018年5期)2018-05-26
