
基于CPSS平行系统懒惰强化学习算法的实时发电调控
2019-06-22 07:42殷林飞陈吕鹏余涛张孝顺
自动化学报 2019年4期
殷林飞 陈吕鹏 余涛 张孝顺
传统发电调控框架在保持多区域互联大电网的系统有功平衡,维持系统频率稳定等方面发挥了重要作用.随着相关研究的不断深入,传统发电调控框架逐渐发展成为存在三种不同时间尺度问题的调控框架[1−2]:1)机组组合(Unit commitment,UC)[3−4];2)经济调度(Economic dispatch,ED)[5];3)自动发电控制(Automatic generating control,AGC)和发电指令调度(Generation command dispatch,GCD)[6−9].然而,传统发电调控框架在以下方面可以改善:1)在传统发电调控框架中,较长时间尺度下调控有可能导致不准确控制指令的产生.同时,不同时间尺度调控之间存在的不协调问题有可能导致反向调节现象的产生.2)在传统发电调控框架中,UC和ED问题解决是以下一时间段负荷预测结果作为条件,而实时AGC和GCD却是基于AGC机组特性所得指令.从长时间尺度的角度来看,AGC和GCD做出的控制结果并不是一个最优的控制结果.3)一般情况下,不同时间尺度下的优化目标均不相同.因此,无论是对长期还是短期而言,仅依据这些优化结果做出的调控指令,都不是最优的.
研究者为了解决传统框架中存在的部分问题,提出了大量集成算法或集成框架.文献[10]提出针对微电网实时调度的AGC和ED集成方法.文献[11]研究了考虑含有AGC仿射索引过程的鲁棒经济调度.文献[12]从优化的角度,将ED和AGC控制器相结合.然而,这些算法均不能完整地对传统发电调控框架进行改善.
强化学习(Reinforcement learning,RL),又称再励学习、评价学习,既可看作是人工智能领域中一种重要的机器学习方法,也被认为是属于马尔科夫决策过程(Markov decision process,MDP)和动态优化方法的一个独立分支.互联电网AGC是一个动态多级决策问题,其控制过程可视为马尔科夫决策过程.文献[13]针对微电网孤岛运行模式下新能源发电强随机性导致的系统频率波动,提出基于多智能体相关均衡强化学习(Correlated equilibrium Q(λ),CEQ(λ))的微电网智能发电控制方法.文献[14]针对非马尔科夫环境下火电占优的互联电网AGC控制策略,引入随机最优控制中Q(λ)学习的“后向估计”原理,有效解决火电机组大时滞环节带来的延时回报问题.然而,这些方法的采用均没有从整体上对传统发电调控框架进行改善.
为了完整地解决传统发电调控框架中存在的问题,本文提出一种实时经济调度与控制(Real-time economic generation dispatch and control,REG)框架替代传统的发电控制框架.除此之外,为适应REG框架,还提出一种懒惰强化学习(Lazy reinforcement learning,LRL)算法.由于懒惰强化学习算法是一种需要大量数据的算法,所提算法需要大量数据进行训练.因此,采用基于人工社会–计算实验–平行执行(Artificial societies— Computational experiments—Parallel execution,ACP)和社会系统的平行系统,在短时间内产生大量数据以适应所提算法的需要.文献[15]提出基于ACP的平行系统进行社会计算的理论.文献[16]提出一种可用于信息和控制的基于信息–物理系统和ACP的分散自治系统.平行系统或平行时代的理论已经被应用到很多领域,例如,平行管理系统[17]、区块链领域[18]、机器学习[19]和核电站安全可靠性的分析[20]等.在一个实际系统中,社会目标也被考虑在CPS中,也可称为信息物理社会融合系统(CPSS)[21];同时,CPS的概念中应当加入社会系统,即“智能电网”或“能源互联网”[22].
因此,基于REG框架的控制方法是一种适用于互联大电网发电调度和控制的统一时间尺度的调控方法.
虽然采用基于ACP和社会系统的平行系统可以快速获取海量的数据,但是这些数据中既存在调控效果较好的数据,也有调控效果较差的数据.为了解决这一问题,设计了一种选择算子对有利于LRL训练的数据进行筛选保留.另外,由于AGC机组存在大量约束限制.设计了一种松弛算子对优化结果进行限制.
为了对比人工神经网络(Artificial neural network,ANN)和LRL的调控效果,本文设计了一种基于人工神经网络和松弛算子结合的松弛人工神经网络算法(Relaxed artificial neural network,RANN).本文提出的LRL算法的特性归纳如下:
1)作为一种统一时间尺度的控制器,从长远角度来看,LRL可以避免不同时间尺度需要协同调控问题.
2)为LRL设计了一个强化网络,可为一个区域的所有AGC机组提供多个输出.且采用松弛机满足AGC机组的约束.
3)懒惰学习的控制策略可以采用从平行系统不断产生的海量数据进行在线更新.这有利于LRL进行训练.
1 传统发电调控框架概述
如图1所示,传统发电调控框架包含UC,ED,AGC和GCD四个过程.
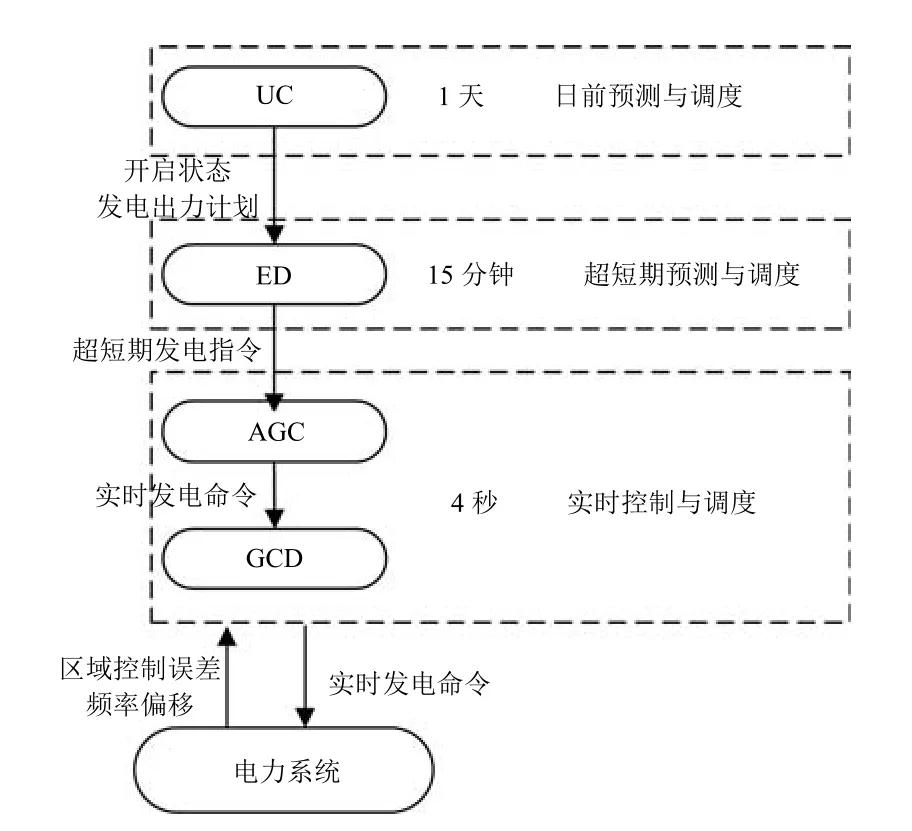
图1 传统发电调控框架Fig.1 Framework of conventional generation control
UC负责制定长期(1天)的机组开停和有功出力计划;然后ED重新制定短期(15分钟)所有已开启的机组的发电指令;最后AGC和GCD为所有AGC机组再次重新制定实时发电指令.
1.1 模型分析
1.1.1 机组组合模型
UC的目标是在给定时间周期内制定出最优的机组开停和生产出力计划.因此,UC问题是一个随机混合0-1整数规划问题,可以采用优化算法进行求解.
UC问题的优化目标是使总发电成本最低,UC问题的约束包括:有功平衡约束、热备用约束、有功出力限制约束以及发电机调节比率约束,其目标函数表达式及约束条件为
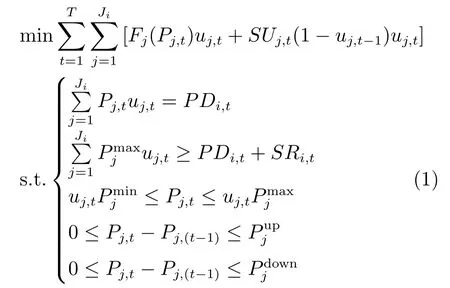
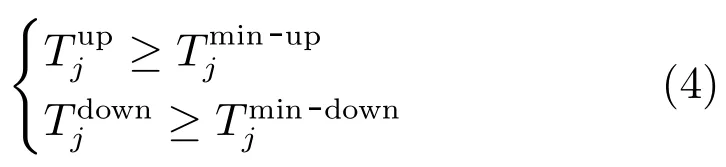
其中,T为给定时间周期内的时间断面的个数,一般设定为24;Ji为第i个区域内的发电机组个数;uj,t为第j个发电机组在第t时间断面的状态,uj,t取值为1或0,分别代表机组开启和关停状态;总发电成本包括燃料成本Fj(Pj,t)和启动成本SUj,t;PDi,t为第i个区域内在第t时间段内的负荷需求总量;分别为在第i区域的第j个发电机组的有功出力的最小值和最大值;SRi,t为第i个区域内在第t时间段内所需的热备用容量;分别为第j台发电机组的上调和下调的最大幅度限制;为第j个发电机组的持续开启时间的最小值;为第j个发电机组的持续停机时间的最小值.
燃料成本Fj(Pj,t),启动成本SUj,t以及约束uj,t的计算公式如下:

其中,Pj,t为第j台发电机组在第t个时间断面时的有功出力;aj,bj和cj分别是发电成本的常数因子,一次项因子和二次项因子;分别为第j台发电机组开启和关停的累积时间;是第j台发电机组从完全关停状态进行冷启动所需的时间;SUH,j和SUC,j分别为第j台发电机组进行热启动和冷启动所需的成本.
1.1.2 经济调度模型
ED采用优化算法从经济角度重新制定发电命令.通常ED的优化目标包括两部分:经济目标和碳排放目标.将两种优化目标进行线性权重结合,得到最终的ED的模型如下:
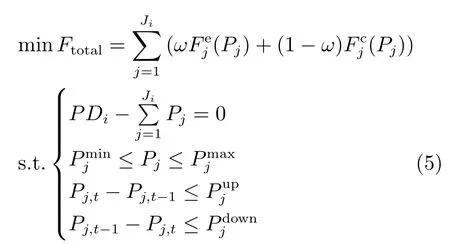
其中,PDi为第i个区域的系统总负荷量,ω为经济目标权重.
经济目标和碳排放目标具体表达如下:
1.1.3 自动发电控制模型
图2是传统实时控制系统中包含两个区域的电力系统AGC模型.AGC控制器的输入为第i个区域的频率误差和区域控制误差(Area control error,ACE)ei,输出为第i个区域的发电命令.AGC模型的控制周期为秒级,一般设定为4秒或8秒.

图2 两区电力系统的AGC模型Fig.2 AGC model of two-area power system
1.1.4 发电命令调度模型
GCD的输入为ACG产生的发电指令,输出为第i个区域内所有AGC机组的发电命令∆Pi,j.进而,ACG单元的实际发电指令取ED和GCD的发电指令之和,即.在实际工程中,GCD的目标采用如式(5)所示的经济目标.
1.2 传统控制算法和优化算法分析
频率控制包含三种调节方式:一次调频、二次调频以及三次调频.一次调频通过调节发电机组在短时间内的有功出力,进而调节系统频率.但是,一次调频是一种有差调节方式.为了更好地平衡发电机和负荷之间的有功功率,电力系统引入了二次调频和三次调频方式.二次调频和三次调频包含了多种算法的集成,即集成了UC,ED,AGC和GCD.其中,AGC采用的是控制算法,而UC,ED和GCD均为优化算法.因此,传统发电调控算法是一种“优化算法+优化算法+控制算法+优化算法”的组合形式.
大量的优化算法被运用到UC,ED和GCD之中.常用的优化算法有:GA[23]、PSO[24]、模拟退火算法[25]、多元优化算法[26]、灰狼优化算法[27]、多目标极值优化算法[28]、混沌多目标机制优化算法[29]等.同时,多种控制算法被运用于AGC控制器中.诸如传统的PID算法、模糊逻辑控制算法[30]、模糊PID[31]、滑动模式控制器[32]、自抗扰控制器[33]分数阶 PID[34]、Q 学习[35]、Q(λ) 学习[14]和 R(λ) 学习[36]以及分布式模型预测控制算法[37]等.表1展示了频率调节方式和传统发电调控框架之间的关系.
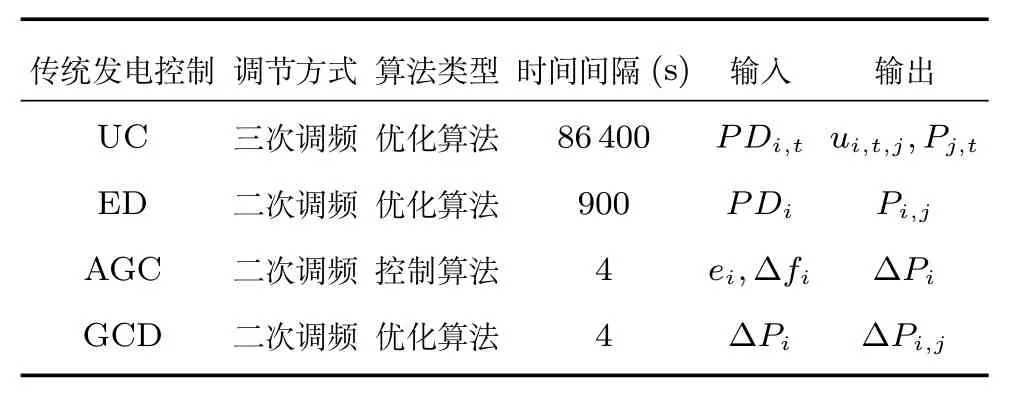
表1 频率调节方式与传统发电调控框架之间的关系Table 1 Relationship between regulation processes and conventional generation control framework
在第i区域中,UC依据下一天的负荷预测值PDi,t制定发电机的启动状态ui,t,j以及出力水平Pj,t.其中时间周期为一天中的每小时,即t={1,2,···,24};ED 采用15分钟后的超短期负荷预测值PDi制定有功出力值Pi,j;AGC控制器计算第i个区域的总发电需求量∆Pi;GCD将总的发电量∆Pi分配到每个AGC机组∆Pi,j.
2 基于ACP的懒惰强化学习的实时经济调度与控制
2.1 懒惰强化学习和实时经济调度与控制
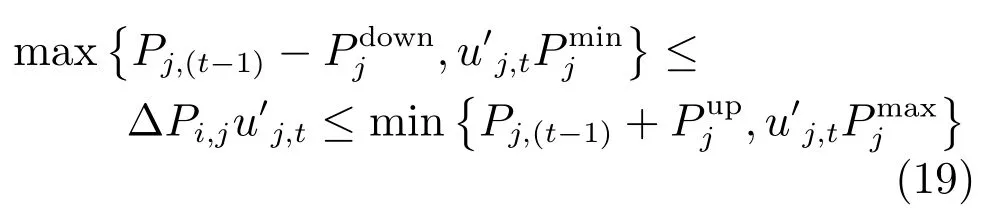
为了快速获取准确的发电调度与控制动作,本文建立了大量的平行发电控制系统.如图3所示,在平行发电系统中,多重虚拟发电控制系统被用来对真实发电控制系统不断地进行仿真.当虚拟控制发电系统的控制效果优于实际发电控制系统时,它们之间会交换它们发电控制器的重要数据.即虚拟发电控制系统将重要的控制器参数传递到真实发电控制系统,而真实发电系统则将更新后的系统模型参数反馈回虚拟发电控制系统.

图3 平行发电控制系统Fig.3 Parallel generation control systems
由于通过平行系统可以获取海量的数据,如果采用传统学习方法对控制算法学习进行训练将花费大量的时间.因此,需要采用一种更有效的学习算法对海量数据进行学习.本文针对平行发电控制系统的特点,提出一种懒惰强化学习算法(LRL).如图4所示,LRL由懒惰学习、选择算子、强化网络以及松弛算子四部分构成.提出的LRL算法可以设计成为基于REG框架的控制器,可以替代传统的组合算法(UC,ED,AGC和GCD).因此,基于REG框架的控制器的输入为频率误差∆fi和ACEei,输出为所有AGC机组的发电命令∆Pi,j.
LRL的懒惰学习将对下一个系统状态进行预测.因此,懒惰学习的输入为频率误差∆fi和ACEei.此外,懒惰学习可以依据电力系统当前采取的动作集A预测电力系统的下一状态.其中,初始动作集合A描述如下:
其中,A具有k列,每一列都是一个AGC机组的发电命令动作向量.对下一状态的预测同样具有k列,且每一列与每一个动作向量的预测相对应.因此,是一个依据所有k列动作向量预测而组成的k列预测矩阵.
采用懒惰学习方法估计未知函数的值与映射g:Rm→R类似.懒惰学习方法的输入和输出可以从矩阵Φ获取,描述如下:

其中,ϕi为Nlazy×k的输入矩阵,i=1,2,···,Nlazy;yi为Nlazy×1的输出向量.第q个查询点的预测值可以由下式计算.

其中,Z=WΦ;v=Wy.W是一个对角矩阵,Wii=ωi,其中,ωi为从查询点ϕq到点ϕi的距离d(ϕi,ϕq)的权重函数.从而,(ZTZ)β=ZTv可以作为一个局部加权回归模型.在其训练过程的误差校验方法可为留一法交叉校验(Leave-one-out cross-validation,LOOCV),计算方式为
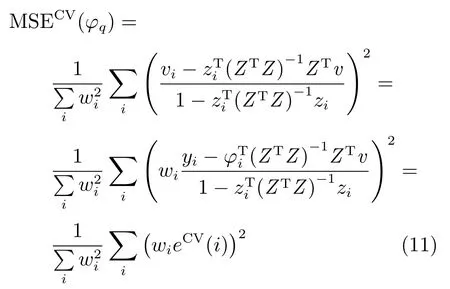

图4 基于REG的LRL控制器的流程图Fig.4 Procedures of LRL based REG controller
其中,eCV(i)为第i个留一误差,计算方式为
其中,Pn为矩阵的回归逼近;βn为n邻近的最优最小二乘序列参数;且在中满足1≤i≤n;βn+1的计算方法如下:
因此,针对REG问题,所提LRL算法中懒惰学习离线学习和在线学习的输入和输出可见表2.

表2 懒惰强化学习输入输出量Table 2 Inputs and outputs of lazy reinforcement learning
LRL中的强化网络可以计算出总的发电命令∆Pi,并分配∆Pi,j到第i个区域里的所有AGC机组上,其中,.强化网络由强化学习和一个反向传播神经网络(Back propagation neural network,BPNN)组成.Q学习是一种无需模型的控制算法.基于Q学习的控制器可以在线根据环境变化更新其控制策略.此类控制器的输入为状态值和奖励值,输出为作用于环境的动作量.它们可以依据Q-矩阵Q和概率分布矩阵P,针对当前的环境状态s,制定应当进行的动作a.矩阵Q和P可以由奖励函数随后进行更新.
其中,α为学习率;γ为折扣系数;β为概率系数;s,s'分别为当前状态和下一状态;R(s,s',a)为奖励函数,与当前状态s和由动作a导致的状态有关.当前状态s和下一状态s'同属于状态集合S,即s∈S,s'∈S.被选择的动作a输出动作集合A,即a∈A.本文采用结构简单的三层感知器BPNN,分配到多个机组的输出的计算公式为

BPNN训练算法为莱文贝格–马夸特方法(Levenberg-Marquardt algorithm).
LRL的松弛算子类似一个操作员对强化网络的输出进行约束控制.因此,松弛算子的约束可以表达为

2.2 离线训练过程
传统学习算法会对所有通过平行系统获取的数据进行学习.然而,采用这些数据进行学习不一定能够取得比当前真实系统更优的控制效果.因此,本文提出的LRL方法,会筛选出那些更优的数据进行学习.即,当在t时刻的状态st优于时刻的状态,而劣于t+∆t时刻的状态,那么算法将排除从st到的变化过程数据,而将保留从st到的变化过程数据进行离线训练.
针对REG问题,离线训练的输入与输出如表2所示.但在对比状态时,可将状态设定为预测的区域i频率偏差,即,也即从选择最优值对应的输入和输出数据进行训练.图5是在平行系统下基于REG框架的懒惰强化学习的控制器运行步骤.
3 算例结果
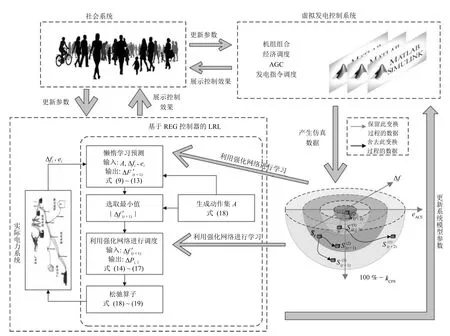
图5 平行系统下基于REG控制器的LRL算法的流程图Fig.5 Procedures of LRL based REG controller under parallel systems
本文仿真均是在主频为2.20GHz,内存96GB的AMAX XR-28201GK型服务器上基于MATLAB 9.1(R2016b)平台实现的.表3是仿真中采用的所有算法,其中各算法的含义见表4.

表3 仿真所用的算法Table 3 Algorithms for this simulation

表4 各对比算法的缩写Table 4 Abbreviation of compared algorithms
组合算法和REG控制器的仿真时间设定为1天或86400秒.总共采用了有4608种传统发电调控算法(8×8×8×9=4608种组合)和两种基于REG框架的算法进行仿真实验.总的设置仿真模拟时间为12.6301年或为(8×8×8×9+2)天.所有的传统发电调控算法的参数设置详见附录A.
图6是IEEE新英格兰10机39节点标准电力系统结构.从图6可以看出,仿真实验将该电力系统划分成3个区域.该系统中设置10台发电机,发电机{30,37,39}划分至区域1,发电机{31,32,33,34,35}划分至区域2,剩下的发电机{36,38}划分至区域3.除此之外,光伏,风电以及电动汽车也被纳入仿真模型之中(详细参数见图7).其中,电动汽车负荷需求曲线为5种不同车辆用户行为叠加而成的.各个机组参数如表5和表6所示.

图6 新英格兰电力系统结构图Fig.6 Structure of New-England power system

图7 光伏、电动汽车、风电、负荷曲线Fig.7 Curves of photo-voltaic power(PV),electric vehicle(EV),wind power and load
仿真实验设置发电控制的控制周期为4s.REG控制器每4s计算一次.对于传统组合算法,UC每天进行一次,ED每15分钟优化一次,AGC和GCD每次控制周期中计算一次.松弛人工神经网络RANN算法由人工神经网络和所提LRL算法中的松弛算子组成.LRL整体的输入和输出分别作为RANN算法的输入和输出.RANN算法的松弛算子见式(18)~(20).BPNN选择的三层感知网络的隐含层神经元的个数设定为40个.每个松弛人工神经网络设置有40个隐藏元.在所提LRL算法中,强化学习和懒惰学习的动作集k的列数设为121,该列数一般可选范围较大;动作值选为从−300~300MW;其中强化学习的学习率的范围为α∈(0,1],本文选为0.1;概率选择系数β∈(0,1],本文设定为0.5;折扣系数λ∈(0,1],本文设定为0.9.其中学习率选择的越大学习速度越快,但会导致精度随之下降.

表5 机组参数表Table 5 Parameters of the generators
表6 机组组合问题参数表Table 6 Parameters for unit commitment problem
强化学习系列算法Q 学习、Q(λ)学习和R(λ)学习算法的离线学习是时间分别为2.27h,2.49h和2.95h;松弛人工神经网络算法的训练时间为15.50h;所提LRL算法的离线训练时间为6.60h.虽然所提LRL算法较传统强化学习算法在离线训练效率方面不具有优势,但是其具有最佳的控制效果.同时,与统一时间尺度的松弛人工神经网络算法相比,LRL算法的离线训练时间较小且其控制效果更优.
仿真结果展示在图8~12和表7~10中.

图8 仿真统计结果Fig.8 Statistical result

表7 UC算法仿真结果统计Table 7 Statistic of simulation results obtained by the UC algorithms

表8 ED算法仿真结果统计Table 8 Statistic of simulation results obtained by the ED algorithms

表9 AGC算法仿真结果统计Table 9 Statistic of simulation results obtained by the AGC algorithms
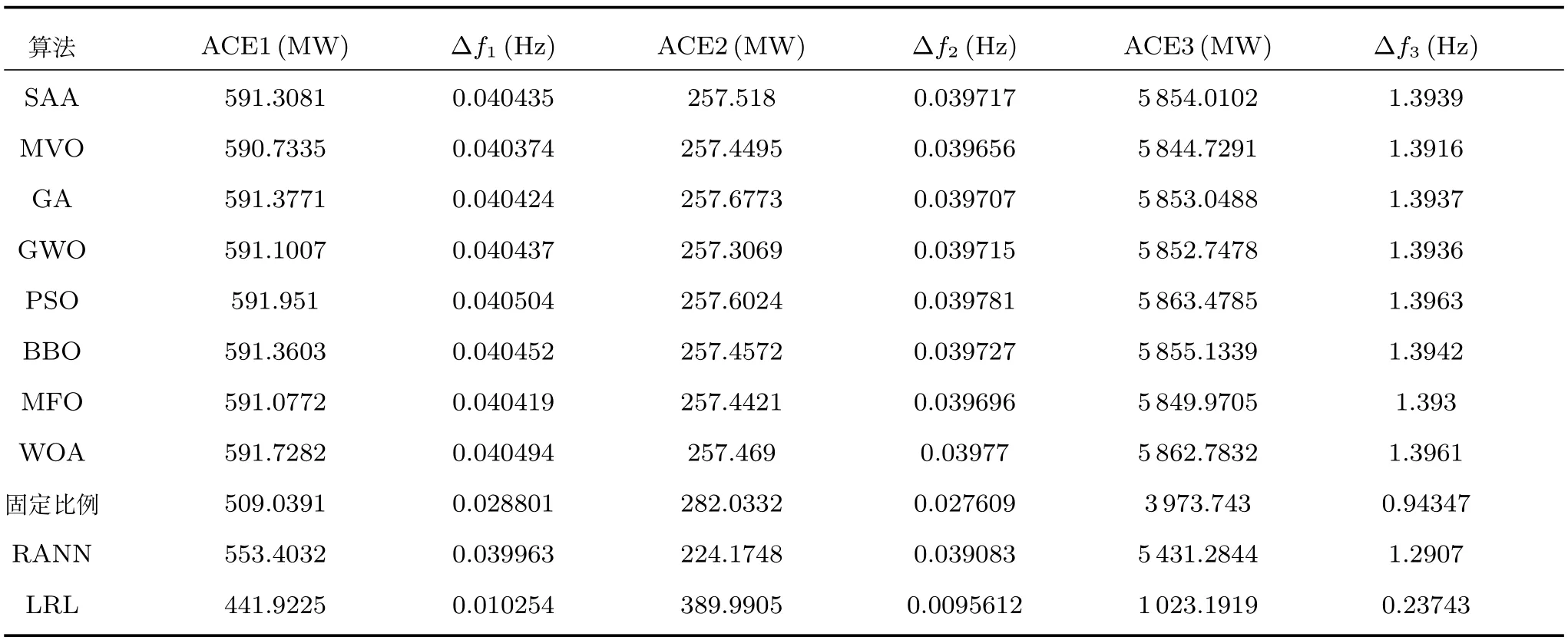
表10 GCD算法仿真结果统计Table 10 Statistic of simulation results obtained by the GCD algorithms

图9 仿真统计结果(频率偏差)Fig.9 Statistical result of frequency deviation
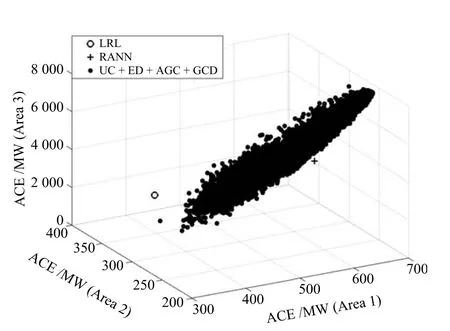
图10 仿真统计结果(区域控制误差)Fig.10 Statistical result of area control error

图11 平行系统频率偏差收敛曲线Fig.11 Convergence curve of frequency deviation obtained by the parallel systems

图12 平行系统区域控制误差收敛曲线Fig.12 Convergence curve of area control error obtained by the parallel systems
图8是频率偏差、区域控制误差和仿真计算所用时间的统计结果,其中所提LRL算法能得到最优的调控效果.
图9是各个算法频率偏差的统计对比效果,其中所提LRL算法能在所有区域均获得最小的频率偏差.图10是各个算法获得的区域控制误差的统计结果,可以看出,所提LRL算法不会导致大量牺牲某个区域的功率来满足其他区域的功率平衡.
图11和图12是利用平行系统仿真数据对所提LRL算法训练的收敛曲线图.可以看出,经过667次的迭代,能获得最优的收敛结果.
从图9以及表7~10可以看出,与传统组合发电控制算法和松弛人工神经网络相比,本文提出的LRL方法可以保持系统内的有功平衡,并且能使电网频率偏差达到最低.因此,LRL能够在多区域大规模互联电网中取得最优的控制效果.
从图8和图10可以看出,在仿真中,由于LRL可以在最短时间内取得最低的频率偏差和最低的控制错误率,LRL的懒惰学习可以有效地对电力系统的下一状态进行预测.因此,LRL可以提供准确的AGC机组动作指令.
在应对多区域大规模互联电网的经济调度和发电控制问题时,REG控制器完全可以取代传统的组合算法方法.
从图11和图12可以看出,由于仿真采用了平行系统,降低了使用的真实仿真时间,由于平行系统进行了迭代,加速了仿真的过程.
4 结论
为了解决多区域大规模互联电网经济调度和发电控制中存在的协同问题,本文提出了一种REG框架.该框架可作为一种传统发电调控框架的替代.然后,为REG控制器提出了一种基于人工社会–计算实验–平行执行方法的懒惰学习算法.基于REG控制器的LRL算法的特征可以总结如下:
1)本文提出了一种统一时间尺度的REG控制框架,并提出一种基于REG控制器的LRL算法.可以有效地对电力系统的下一运行状态进行预测并且输出满足UC问题的约束动作指令,取得最优的控制效果.
2)LRL中的强化学习网络具有同时产生多个输出的能力.因此,基于REG控制器LRL的可以不断地为存在于多区域大规模互联电网的所有AGC机组输出发电命令.
3)通过搭建平行系统,使得基于LRL的REG控制器可以用于解决多区域大规模互联电网经济调度和发电控制问题.
附录A
各算法重要参数设置如下:
1)PID控制:比例系数kP=−0.006031543250198,积分系数kI=0.00043250;
2)滑模控制器:开通/关断点kpoint=±0.1Hz,开通/关断输出kv=±80MW;
3)自抗扰控制:扩张状态观测器

4)分数阶PID控制:比例系数kP=−1,积分系数kI=0.43250,λ=1.3,µ=200;
5)模糊逻辑控制器:X(输入,∆f)在[−0.2,0.2]Hz等间隔选取21个区间,Y(输入,R∆fdt)在[−1,1]Hz等间隔选取21个区间,Z(输出,∆P)在[−150,150]MW 等间隔选取441个区间;
6)Q 学习:动作集A={−300,−240,−180,−120,−60,0,60,120,180,240,300},学习率α=0.1,概率分布常数β=0.5,未来奖励折扣系数γ=0.9,λ=0.9;
7)Q(λ) 学习:A={−300,−240,−180,−120,−60,0,60,120,180,240,300},α=0.1,β=0.5,γ=0.9,λ=0.9;
8)R(λ)学习:A={−300,−240,−180,−120,−60,0,60,120,180,240,300},α=0.1,β=0.5,γ=0.9,λ=0.9,R0=0;
9)对于所有用于UC的优化算法:进化代数Ng=50,种群数目Ps=10;
10)对于所有用于ED的优化算法:进化代数Ng=30,种群数目Ps=10;
11)对于所有用于GCD的优化算法:进化代数Ng=5,种群数目Ps=10;
猜你喜欢
环球时报(2022-06-15)2022-06-15
新高考·高一数学(2022年3期)2022-04-28
思维与智慧·上半月(2022年4期)2022-04-08
黑龙江大学自然科学学报(2022年1期)2022-03-29
小资CHIC!ELEGANCE(2022年1期)2022-01-11
小哥白尼(神奇星球)(2021年4期)2021-07-22
科学大众(2021年9期)2021-07-16
科学家(2021年24期)2021-04-25
汽车观察(2016年3期)2016-02-28
燕山大学学报(2015年4期)2015-12-25
