
基于F?PID的自动控制算法在潜艇应急操纵中的应用
2019-06-20 06:07肖剑波胡大斌戴余良
现代电子技术 2019年10期
肖剑波 胡大斌 戴余良


摘 要: 针对潜艇在航行中,由于操作错误、机械系统故障等原因出现的危险纵倾、损失浮力和舵故障等紧急情况,为避免人员操作失误危及潜艇安全,在潜艇应急操纵中引入F?PID复合自动控制算法。通过参数模糊自整定的PID控制模拟应急操纵,实现潜艇在不同应急状况下的自动操纵。根据不同应急工况设计潜艇状态参数进行仿真计算,验证自动控制算法的合理性。
关键词: 应急操纵; 潜艇安全; 自动控制算法; 模糊自整定; PID控制; 模糊控制
中图分类号: TN876?34 文献标识码: A 文章编号: 1004?373X(2019)10?0102?06
Research on application of F?PID based automatic control algorithm in
emergency operation of submarine
XIAO Jianbo, HU Dabin, DAI Yuliang
(College of Naval Architecture & Ocean Engineering, Naval University of Engineering, Wuhan 430033, China)
Abstract: In allusion to the emergencies such as dangerous trim, loss of buoyancy and rudder fault caused by operation mistakes, mechanical system failure and other reasons during the submarine voyage, an F?PID based composite automatic control algorithm is introduced in emergency operations of the submarine to avoid submarine safety risks caused by personnel′s operation mistakes. The PID control based on parameters′ fuzzy self?tuning is used to simulate emergency operations, so as to realize submarine′s automatic operations in different emergency situations. The submarine′s state parameters are designed for simulating calculation according to different emergency working conditions. The reasonability of the automatic control algorithm was verified.
Keywords: emergency operation; submarine safety; automatic control algorithm; fuzzy self?tuning; PID control; fuzzy control
0 引 言
潜艇在航行中,由于操作错误、机械系统故障及战斗破损或周围环境突变等原因导致其出现危险纵倾、损失浮力和舵故障等紧急情况,在这种情况下,常规潜艇机动控制已不能维持潜艇正常航行和作战,需要对潜艇进行应急操纵,确保潜艇及艇员的安全[1]。
国内外学者从潜艇應急模型建立入手,通过仿真实验,进而得出潜艇应急操纵策略。如王鹢等对潜艇应急模型进行分类研究,综合考虑破损位置及面积等因素,建立了潜艇舱室破损进水模型[2],并对高压吹除和抛弃压载等潜艇抗沉应急操纵过程进行建模,通过仿真实验证明了模型的准确合理。戴余良研究构建了完整的潜艇应急上浮数学模型,包括潜艇舱室破损进水时附加力计算模型、潜艇在攻角过大时六自由度运动模型以及主压载水舱高压吹除系统模型[3?4]。通过对潜艇压载水舱高压气吹除系统及其动态过程的研究,采用MSC.EASY5动力系统建模与仿真软件建立了高压水舱吹除系统供气、停止,及解除全过程的数学模型并将仿真结果与实艇进行对比。郝英泽等在建立潜艇破损进水应急操纵模型的基础上,利用Delphi编制了潜艇破损进水应急操纵仿真控制软件,为潜艇部队应急操纵训练提供了有力帮助[5]。刘常波等采用摩擦管流理论,建立潜艇首部舱室破损进水时应急操纵数学模型,通过仿真能够实现对应急上浮过程的准确预报,并对低航速下潜艇损失浮力时应急操纵进行研究[6]。金涛等对艇体及通海管路破损进水时潜艇状态进行系统分析,区别进水部位、进水方式和航行深度的不同,将车、舵、气、水等影响因素考虑进去,得到较为具体的潜艇破损进水应急操纵模型[7]。
本文在研究中引入F?PID复合应急自动控制算法,开展应急自动控制功能研究。通过参数模糊自整定的PID控制模拟应急操纵,实现潜艇在不同应急状况下的自动操纵,以避免潜艇在危险状况下的危险操作,提高潜艇安全性。
1 潜艇应急操纵分析
潜艇应急操纵主要分为三种类型:升降舵故障时的操纵、危险纵倾时的操纵以及损失浮力时的操纵。升降舵是潜艇水下垂直面运动的主要操纵工具,分为首、尾升降舵,分别位于潜艇首(围壳)部和尾部。升降舵发生故障时,当潜艇仍有航速,则艇体会受到额外的力和力矩,出现潜艇运动失衡,产生较大纵倾以及深度变化,造成潜艇操纵无法正常实现,甚至危及潜艇安全。
潜艇在水下很容易出现纵倾角变化。以某型潜艇为例,纵倾角增加1° 仅需要扶正力矩,或者首尾均衡水舱调水250 L;而较大的纵倾角会打破潜艇原有动平衡,造成潜浮速度过快,可能出现坠入海底或者上浮至海面,危及潜艇安全。此外,较大纵倾角不仅造成电池电解液泄漏等安全隐患,还影响艇内机械设备的正常工作。
潜艇在水下航行时,由于碰撞、鱼雷等武器击中或者操纵失误等原因造成艇体部分舱室进水,或者由于航行区域海水密度剧烈变化等原因,使得潜艇受到较大的竖直向下的附加静载力,此现象称为潜艇损失浮力。潜艇损失浮力不仅会使艇受到向下的附加载荷,还可能因为首尾舱室进水而受到附加力矩,造成潜艇危险纵倾。
潜艇空间六自由度运动方程是潜艇应急操纵模型的基础,本文选用国际水池会议(ITTC)推荐的和造船与轮机工程学会(SNAME)术语公报的坐标体系,各参数意义符合其定义。选用1967年美国海军舰船研究与发展中心(DTNSRDC)发表的葛特勒(Gertler)等[8]提出的“用于潜艇模拟研究的标准运动方程”。
2 F?PID应急自动控制算法
2.1 参数模糊自整定PID控制
模糊控制(Fuzzy Control,FC)以模糊集合论和模糊逻辑为理论基础,将控制器输入模糊化,根据模糊控制规则进行逻辑推理,最后将得到的模糊量做清晰化处理。虽然其具有很多优点,但其在稳态控制上精度不高,控制规律粗糙,在系统平衡点存在控制“盲区”。为弥补上述不足,发挥经典控制理论(PID控制)的优势,本文综合模糊控制和PID控制方法,采用参数模糊自整定PID控制开展潜艇应急操纵中的自动控制技术研究。
参数模糊自整定PID控制针对干扰因素较多的复杂被控对象,利用模糊控制实时调整PID参数,实现自动控制。该控制形式最大的优势在于引入人的操作经验,根据被控对象的变化能满足控制参数的不同要求,控制效果更好,系统整体系能更加稳定[9]。参数模糊自整定PID控制系统如图1所示。
图1 参数模糊自整定PID控制系统示意图
2.2 PID控制器设计
潜艇应急操纵中,需要控制的指标主要有航向、航速、深度与纵倾,以及剩余浮力和力矩[10]。航向自动控制主要通过方向舵完成,这里默认潜艇应急状态下方向舵工作正常。PID控制航向是根据首向角的比例、微分和积分来实现的,其控制规律为:
[δr=krPΔψ+krIΔψdt+krDdψdt] (1)
由于在应急操纵过程中,通常需要将航速降低至6 n以下,因此在自动控制中加入对航速的控制规律研究。本文根据螺旋桨转速uc实现对航速的PID控制,其控制规律为:
[uc=kuPΔV+kuIΔVdt+kuDdVdt] (2)
由于航速在潜艇空间六自由度方程中分为三个分量,即:
[V=u2+v2+w2] (3)
式中:V表示整体航速;u,v,w分别表示航速在Gx,Gy,Gz轴的分速度。
因此对式(2)求导可得:
[u′c=kuPΔV′+kuIΔV+kuDd2Vdt2] (4)
式中:
[V′=uu′+vv′+ww′u2+v2+w2] (5)
通常情况下,由于潜艇深度和纵倾需要首尾升降舵协调配合进行控制,因此在自动控制中,将深度和纵倾控制放在一起进行讨论。深度和纵倾自动操舵主要分为三种类型:首尾舵分离控制、首尾舵协调控制以及首尾舵同时控制。由于本文研究对象为围壳舵型潜艇,选取首尾舵协调控制方式。
首尾舵协调控制是通过首舵控制深度,尾舵控制深度和纵倾的方式进行的,这一方式能够有效解决当首舵被卡时无法控制潜艇深度的问题,同时尾舵深度控制信號能够保证潜艇在安全纵倾范围内实现自动控制,大大提高了潜艇机动安全性。首尾舵协调控制的控制规律为:
[δb=kbPΔH+kbIΔHdt+kbDdHdtδs=-ksPΔθ-ksIΔθdt-ksDdθdt+kHsΔH] (6)
在尾舵深度控制信号中,深度偏差系数用来限定潜艇自动控制过程最大纵倾角,其取值为:
[kHsΔH=kHsΔH, kHsΔH≤KskθsΔθKskθsΔθ, kHsΔH>KskθsΔθ] (7)
2.3 模糊自整定设计
参数模糊自整定PID控制是通过总结过往工作经验设计模糊规则,然后通过计算控制指标进行模糊判断,确定参数调整量的大小和极性,实现对PID控制器三个参数的在线修正[11?12]。参数模糊自整定PID控制的核心是设计模糊规则,即建立系统偏差e和偏差变化率ec与比例KP、积分KI、微分KD三个系数之间的模糊关系。本文以航行深度为例,其模糊设计步骤如下:
1) 建立系统偏差e和偏差变化率ec绝对值的论域和隶属函数,即:
[e={1,2,3}ec={1,2,3}] (8)
式中,1,2,3分别表示较小、中等以及较大偏差和偏差变化率。其隶属函数分别为:
[e(1)=1, 0≤e≤2-0.25e+1.5, 2
2) 确定控制指标的值和相应隶属度,即:
[P1e=1=e(1)P2e=2,ec=1=e(2)∧ec(1)P3e=2,ec=2=e(2)∧ec(2)P2e=2,ec=3=e(2)∧ec(3)P4e=3=e(3)] (9)
3) 定义自整定PID三个参数的调整值,即:[KP=1+λPi=15Pi·KPii=15PiKI=1+λIi=15Pi·KIii=15PiKD=1+λDi=15Pi·KDii=15Pi] (10)
式中:λP,λI,λD为控制参数修正系数;KP,KI,KD为在相应论域采用PID参数整定法取得的参数常规值。
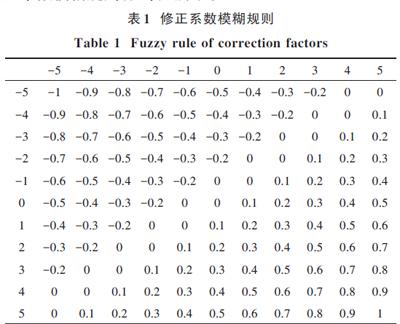
4) 将偏差和偏差变化率划分为正负五个区间以及一个零位,根据不同区间下PID参数修正规律,设计修正系数模糊规则,如表1所示。
5) 计算PID自动控制输出量,即:
[Un=KPe(n)+KIi=1ne(i)+KDe(n)-e(n-1)] (11)
或:
[ΔUn=KPe(n)-e(n-1)+KIe(n)+ KDe(n)-2e(n-1)+e(n-2)] (12)
此外,在控制过程中,三个参数还遵循如下变化规则:
1) 比例参数KP的模糊控制,在控制过程初期,为减少超调量,应该适当减小KP,进入控制中期时,适当增加KP以缩短控制周期,提高系统响应并控制稳态误差[13]。
2) 积分参数KI的模糊控制,在控制过程初期,减少KI能够避免出现积分饱和,导致系统超调量过大,随着控制过程的深入,应该逐渐增加KI,强化积分控制作用,限制静态偏差。
3) 微分参数KD的模糊控制,在控制过程初期,适当增大KD能够控制系统波动,降低甚至消除超调量,但是KD对系统控制有抑制作用,因此在控制过程中期[14],应适当减小KD。
3 应急自动控制仿真试验
应急操纵仿真试验主要包括航速航向控制、升降舵故障时的应急操纵、危险纵倾时的应急操纵、浮力损失(本文仅针对舱室破损进水)时的应急操纵以及综合应急操纵,采用F?PID复合自动控制算法对试验过程进行模拟,并基于Matlab绘制不同工况下各潜艇状态参数的变化曲线,对比潜艇运动方程和经验规律,对试验结果进行分析。
3.1 首(围壳)舵卡时的应急自动控制仿真试验
由于升降舵故障时一般需要降低航速,因此本文设置当前试验航速4 kn,航行深度50 m,纵倾角0°,方向舵及航向均为0°,设置首升降舵被卡15°。仿真过程潜艇状态参数变化曲线如图2所示。从图2可以看出,首升降舵被卡上浮舵角(正舵角)时,尾舵打下潜舵(正舵角)控制纵倾,潜艇在平行舵作用下成首纵倾(纵倾角为负),航速受到打舵及纵倾的影响略微降低,深度由于首倾而略微增加。
3.2 危险首纵倾时的应急自动控制仿真试验
危险纵倾仿真时,默认潜艇车、舵、气等功能均可以正常使用。设置当前试验航速6 kn,深度50 m,首尾升降舵、方向舵及航向均为0°,设置潜艇当前纵倾角-10°。仿真过程潜艇状态参数变化曲线如图3所示。通过仿真曲线可以看出,潜艇出现危险首纵倾时,首尾升降舵打相对上浮舵(首升降舵正舵角,尾升降舵负舵角),潜艇深度由于初始过大首倾角而明显增加,随着控制过程的进行深度逐渐趋于稳定,纵倾角逐渐增加,航速受纵倾影响而降低,当纵倾恢复后航速也逐漸恢复。
3.3 中部舱室进水时的应急自动控制仿真试验
由于中部舱室进水时产生的剩余静载力作用点距离艇体重心较近,因此本文在试验中忽略静载力产生的附加力矩。设置航速为6 kn,首升降舵打上浮满舵且保持不变,纵倾角10°保持不变,设置中部舱室进水量55.8 m3。仿真过程潜艇状态参数变化曲线如图4所示。
图2 首(围壳)舵卡时自动控制潜艇状态参数变化曲线

图3 危险首纵倾时自动控制潜艇状态参数变化曲线

图4 中部舱室进水时自动控制潜艇状态参数变化曲线
从图4中曲线可以看出,中部舱室进水后,由于首升降舵及尾倾的作用,潜艇深度变化幅度不大,经过短暂起伏后能恢复原有深度。尾升降舵根据深度及纵倾角(此试验纵倾角不变)变化不断调整,最终趋于稳定下潜舵,航行速度受到打舵及纵倾的影响而略有降低。
3.4 升降舵故障造成危险纵倾时的应急自动控制仿真
设置航速为6 kn,首升降舵、方向舵及航向均为0°,航行深度50 m。
由于尾升降舵被卡下潜舵(尾舵角3°),未及时查明造成潜艇危险首纵倾(纵倾角-10°),试验目标为提高航速至10kn,维持潜艇定深航行。仿真过程潜艇状态参数变化曲线如图5所示。
可以看出,由于升降舵故障导致危险纵倾,适当提高航速以增加舵效,首(围壳)舵打上浮舵挽回首倾,潜艇在大角度首倾影响下有明显下沉。随着首(围壳)舵控制效果提高,深度逐渐恢复并最终稳定在57 m,纵倾角也明显恢复至安全区间,最终潜艇成首倾定深状态。
4 结 论
本文基于F?PID开展潜艇应急自动控制算法研究,根据不同应急工况设计潜艇状态参数进行仿真计算。结果表明:在首升降舵卡或危险首纵倾时,通过应急自动控制算法,可以在较短时间内实现潜艇深度、纵倾等的稳定控制,各相关参数波动均在接受范围内,验证了自动控制算法的合理性。

图5 升降舵故障造成危险纵倾时自动控制潜艇状态
参数变化曲线
Fig. 5 State parameter variation curves of automatically?controlled submarine when an elevating rudder fault
causes a dangerous trim
為简化算法,本文在应急操纵中仅对推进器、舵装置及均衡系统予以考虑,没有将应急上浮中最主要操纵手段的潜浮系统纳入,后续将围绕压载水控制在应急自动控制算法中的应用进行研究。此外,潜艇应急模型还受到海洋环境的影响,例如海水密度变化引起损失浮力等,现有模型在环境因素上考虑不全。接下来的研究可以尝试多种建模方式研究潜艇应急运动,对可能影响模型精度的因素逐一进行考虑,建立更精确的潜艇应急模型。
参考文献
[1] 刘辉,浦金云,金涛.破损潜艇应急起浮操纵控制研究[J].海军工程大学学报,2009,21(1):96?100.
LIU Hui, PU Jinyun, JIN Tao. Maneuver and control of flooded submarine emergency surfacing [J]. Journal of Naval University of Engineering, 2009, 21(1): 96?100.
[2] 王鹢,王文武,孙枫,等.潜艇应急操纵的建模与仿真[J].计算机仿真,2003,20(6):1?3.
WANG Yi, WANG Wenwu, SUN Feng, et al. Modeling and simulation of submarine emergency maneuver [J]. Computer simulation, 2003, 20(6): 1?3.
[3] 戴余良.潜艇应急上浮操纵运动分析与控制技术研究[D].武汉:武汉理工大学,2007.
DAI Yuliang. Research on the dynamic stability and control techniques of a submarine emergency ascent [D]. Wuhan: Wuhan University of Technology, 2007.
[4] 戴余良,刘祖源,俞科云.潜艇应急上浮操纵与控制研究评述[J].舰船科学技术,2007,29(6):23?29.
DAI Yuliang, LIU Zuyuan, YU Keyun. Investigation on the automatic control methods for a submarine in emergency ascent under casualty conditions [J]. Ship science and technology, 2007, 29(6): 23?29.
[5] 郝英泽,胡坤,何斌.潜艇水下破损进水应急操纵模型[J].四川兵工学报,2011,32(4):4?6.
HAO Yingze, HU Kun, HE Bin. Model of emergent manipulating for disrepair entering water of submarine under water [J]. Journal of Sichuan Ordnance, 2011, 32(4): 4?6.
[6] 刘常波,丁风雷,田炳丽.潜艇应急上浮操纵运动仿真预报研究[J].计算机仿真,2013,30(7):29?32.
LIU Changbo, DING Fenglei, TIAN Bingli. Research on simulation prediction of submarine emergency floating maneuverability [J]. Computer simulation, 2013, 30(7): 29?32.
[7] 金涛,刘辉,王京齐,等.舱室进水情况下潜艇的挽回操纵[J].船舶力学,2010,14(z1):34?43.
JIN Tao, LIU Hui, WANG Jingqi, et al. Emergency recovery of submarine with flooded compartment [J]. Journal of ship mechanics, 2010, 14(S1): 34?43.
[8] 施生达.潜艇操纵性[M].北京:国防工业出版社,1995.
SHI Shengda. Submarine manoeuvrability [M]. Beijing: National Defense Industry Press, 1995.
[9] LE M D, NGUYEN T H, NGUYEN T T, et al. A new and effective fuzzy PID autopilot for ships [C]// Proceedings of IEEE International Symposium on Computation Intelligence in Robotics and Automation. Kobe: IEEE, 2003: 1411?1415.
[10] 林雄伟,胡大斌,戴余良,等.潜艇操纵控制方法[J].艦船科学技术,2013,35(5):7?10.
LIN Xiongwei, HU Dabin, DAI Yuliang, et al. Survey for maneuver control of submarine [J]. Ship science and technology, 2013, 35(5): 7?10.
[11] 李海生,朱学峰.自抗扰控制器参数整定与优化方法研究[J].控制工程,2004,11(5):419?423.
LI Haisheng, ZHU Xuefeng. On parameters tuning and optimization of active disturbance rejection controller [J]. Control engineering of China, 2004, 11(5): 419?423.
[12] TSAI S H, LI T H S. Robust H∞ fuzzy control of a class of fuzzy bilinear systems with time?delay [J]. Chaos, solitons & fractals, 2009, 39(5): 2028?2040.
[13] 任洪亮,边信黔.基于模糊规则的多模型控制方法在AUV航向控制中的应用[J].自动化技术与应用,2004,23(6):1?4.
REN Hongliang, BIAN Xinqian. Fuzzy rule?based multi?model control strategy and its application in AUV YAM control [J]. Techniques of automation and applications, 2004, 23(6): 1?4.
[14] 戴余良,林俊兴,苗海,等.潜艇空间机动的多变量滑模模糊控制[J].武汉理工大学学报(交通科学与工程版),2009,33(6):1040?1043.
DAI Yuliang, LIN Junxing, MIAO Hai, et al. Design of multivariable sliding mode fuzzy controller for spatial maneuver of submarines [J]. Journal of Wuhan University of Technology (Transportation science & engineering), 2009, 33(6): 1040?1043.
猜你喜欢
山东工业技术(2016年23期)2016-12-23
科学与财富(2016年26期)2016-12-01
企业技术开发·中旬刊(2016年10期)2016-11-12
科技视界(2016年6期)2016-07-12
西南交通大学学报(2016年3期)2016-06-15
科技视界(2016年12期)2016-05-25
电子制作(2016年21期)2016-05-17
通信电源技术(2016年5期)2016-03-22
西北工业大学学报(2015年1期)2016-01-19
池州学院学报(2015年3期)2016-01-05
