
基于多模型模糊扩展卡尔曼滤波的电池SOC预测
2019-06-20 03:55陈万顺
长春师范大学学报 2019年6期
王 勇,陈万顺
(芜湖职业技术学院信息工程学院,安徽芜湖 241006)
随着人们对节能、环保的重视,电动汽车在生活中的使用越来越普遍。电池生产与使用是电动汽车的核心技术之一。对电池的荷电状态(State of Charge,SOC)的精确测量直接影响对动力电池的保护和能量的利用效率,具有重要意义[1]。然而动力电池的SOC与电池充放电次数、环境温度、充放电速率之间存在复杂的非线性关系,难以实时精确测量。
传统的开路电压法测量精度较高,但是测量过程中为了等待电池内部恢复平衡需要较长的静置时间,难以在实际应用中实时测量。安时积分法结构简单,运用广泛,但在测量过程中误差会积累,测量精度不高。以神经网络为代表的智能测量方法,具备很强的非线性拟合能力且抗干扰性能好。但此类方法需要大量数据事先训练,且硬件实现复杂,难以推广[2-3]。较为成功的方法是卡尔曼滤波方法,了解被测对象的系统噪声和观测噪声的统计特性之后,可以实现最小方差估计。该方法计算量小,尤其适合微处理器硬件实现[4-5]。但是卡尔曼滤波过程中对数学模型的精度要求较高,电池的老化会造成其内部参数的变化,从而限制了卡尔曼滤波预测电池SOC的精度。针对电池寿命周期中不同阶段的充放电特性有所变化,本文设计了一种多模型扩展卡尔曼滤波方法,以期提高对电池SOC的测量精度。

图1 一阶戴维宁模型
1 电池模型的建立
为了降低测量系统的运算量,本文采用一阶戴维宁模型描述电池的充放电特性,如图1所示。R1为电池内部的欧姆电阻,电阻R2和电容C并联描述电池充放电过程中的极化现象[6]。E(t)为电池内部的电动势,E(t)与电池的SOC值s(t)之间存在非线性关系:E(t)=F(s(t))。U(t)为电池的端电压。
选取电池的SOC值s(t)和极化电容C两端的电压UC(t)为状态变量,以充电电流I作为输入量,电池的端电压U(t)作为观测量,建立电池的状态空间表达式。以T为采样周期进行离散化可得[7]:
(1)
U(k)=F(s(k))-R1I(k)-UC(k)+v(k).
(2)
其中,Q0为电池的容量,w(k)为系统过程噪声,其方差为Q(k);v(k)为观测噪声,其方差为R(k)。
2 扩展卡尔曼滤波
由于状态变量s(k)与观测量U(k)之间存在非线性关系,本文采用扩展卡尔曼滤波对数学模型进行一阶线性化处理,估计电池核电状态s(k),式(1)(2)所示系统的形式如式(3)(4)所示。
x(k+1)=Ax(k)+Bu(k)+w(k).
(3)
y(k+1)=F(x(k))+v(k).
(4)
运用扩展卡尔曼滤波的计算过程如下:
①初始化系统状态x(0)、y(0)与协方差矩阵P0;

④对式(4)进行一阶线性化,获得观测矩阵H(k)=∂F/∂x;
在扩展卡尔曼滤波过程中对观测方程中的非线性函数F(x(k))展开成泰勒级数,并忽略其二阶以上的项,实现线性化。当采样时间足够短,滤波误差较小时,则可以使用扩展卡尔曼滤波。
3 模糊多模型扩展卡尔曼滤波算法
一般锂电池循环充放电500次以上,电池的容量仍能保持在标称容量的80%以上。但电池充放电次数的增加,电池的充放电特性会发生变化。本文分别选取电池循环充放电0次、300次和500次时对其进行参数辨识,建立其数学模型。为了降低模型精度造成的误差,本文采用多个数学模型描述电池充放电的特性,并针对各个数学模型分别进行卡尔曼滤波。如图2所示,取实际观测量U(k)和所建立的第i个电池模型之差的范数αi(k)=‖U(k)-yi(k)‖表征当前模型与实际电池的符合程度。αi(k)的值越小,说明当前模型越精确。以αi(k)为输入,以第i个电池数学模型所占权重θi(k)为输出,建立模糊推理系统。αi(k)的论域是[0,1],θi(k)的论域也为[0,1]。选取模糊集合{S、MS、M、MB、B}描述αi(k)和θi(k),其中,S代表小,MS代表中等偏小,M代表中等,MB代表中等偏大,B代表大。采用高斯型函数描述αi(k)和θi(k)的隶属度。在模糊推理系统中存在以下逻辑关系:
ifαi(k) is S,thenθi(k) is B;
ifαi(k) is MS,thenθi(k) is MB;
ifαi(k) is M,thenθi(k) is M;
ifαi(k) is MB,thenθi(k) is MS;
ifαi(k) is B,thenθi(k) is S。

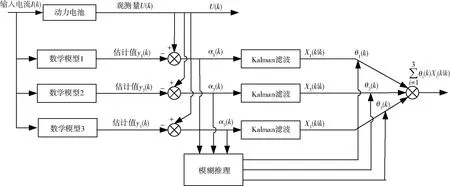
图2 模糊多模型卡尔曼滤波原理图
4 仿真实验
为了验证算法的有效性,本文选取常用的容量为2800 mAh的18650电池为测试对象。基于MATLAB软件搭建仿真模型如图3所示,根据式(1)(2),以充放电电流为输入I(k),以电池的端电压U(k)为观测量建立电池的状态空间方程。观测过程中受到均值为0、方差为0.0006的高斯噪声的干扰。针对使用寿命周期中不同阶段的电池进行参数辨识,获取其欧姆电阻R1、极化电阻R2以及极化电容C的值。构建数学模型进行卡尔曼滤波,并针对各模型的对观测值的估计,通过模糊推理,得出该模型状态估计的权重。在测试过程中,电池的初始SOC值为0.75,以2.8 A的电流充电50 s,然后以2.8 A的电流持续放电100 s,期间每1 s采样1次。
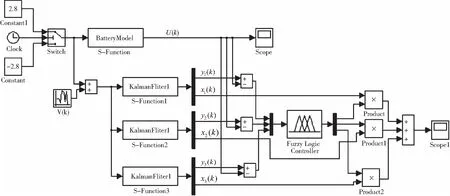
图3 仿真模型
以仿真模型中电池模型BatteryModel中的状态变量值作为理想值,分别采用传统的卡尔曼滤波和多模型模糊卡尔曼滤波进行状态估计,预测电池SOC的值。预测结果如图4和图5所示。
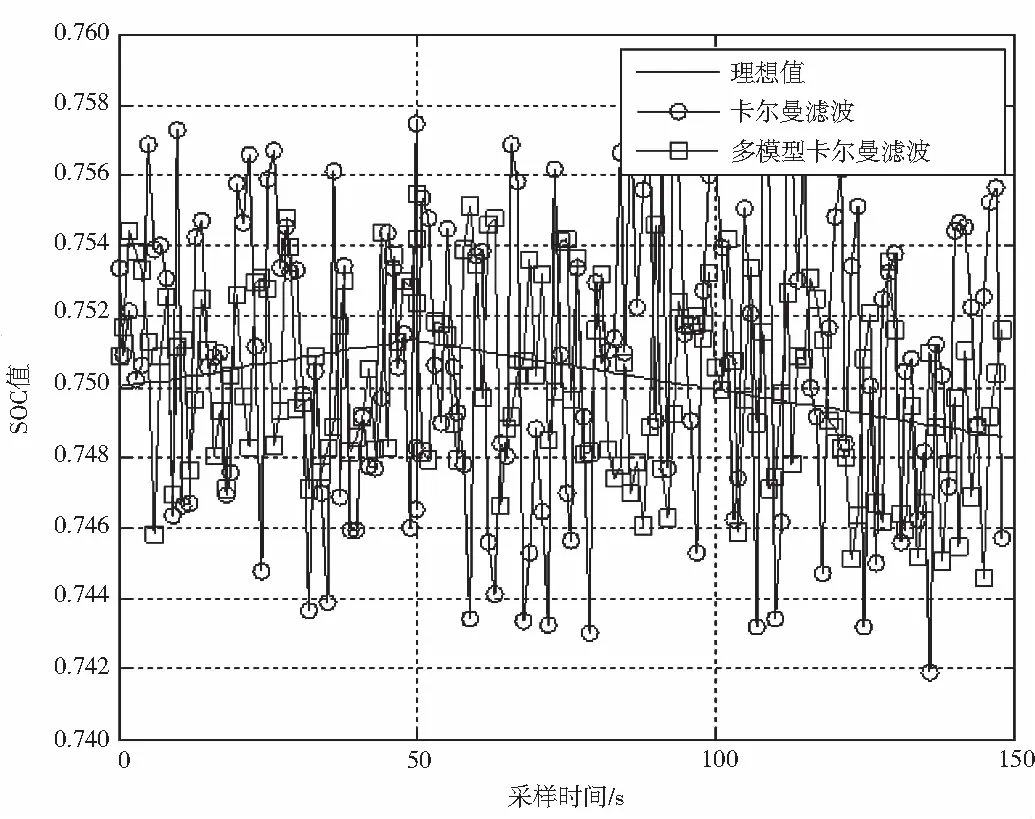
图4 预测结果对比

图5 预测结果误差分析
通过预测结果可以发现,多模型模糊卡尔曼滤波的预测结果更接近理想值,其与理想值的绝对误差更小,这说明多模型模糊卡尔曼滤波算法具有一定的应用价值。
5 结语
在对电池SOC值预测的过程中,卡尔曼滤波计算量小,易于计算机硬件实现,被广泛使用。多模型模糊卡尔曼滤波算法是在传统卡尔曼滤波的基础上,分别建立多个数学模型描述不同使用阶段电池的充放电特性,并采用模糊推理综合各模型预测的结果。该方法在不增加硬件成本的前提下,提高了实时预测的精度,具有一定的工程应用价值。
猜你喜欢
体育科技文献通报(2022年3期)2022-05-23
新高考·高二数学(2022年3期)2022-04-29
新能源汽车供能技术(2021年1期)2021-10-14
电子制作(2019年23期)2019-02-23
电子制作(2019年23期)2019-02-23
电子制作(2019年23期)2019-02-23
北京航空航天大学学报(2017年9期)2017-12-18
中学数学杂志(初中版)(2016年5期)2016-11-01
电测与仪表(2016年21期)2016-04-11
电源技术(2016年9期)2016-02-27
