
地下铲运机自主行驶过程中转向死区的研究
2019-06-20 02:40:22李恒通石潇杰
有色金属(矿山部分) 2019年3期
李恒通,严 勃,石潇杰,石 峰,郭 鑫
(1.北京矿冶科技集团有限公司,北京 100160;2.北矿机电科技有限责任公司,北京 100160)
随着地下金属矿的开采深度逐步加深,人员的工作环境变得愈发恶劣。近年来,各大矿山都逐步加大对无人化、智能化设备的投入,地下铲运机作为地下矿山开采的主力设备,自主行驶对于智能铲运机而言有重要的现实意义。
区别于传统车辆的轮式转向,地下铲运机采用铰接转向,铰接转向结构是将前后车体采用铰接方式连接起来,采用液压缸驱动,改变前后车体的夹角,进而在行驶过程中实现转向。采用铰接转向能缩小转弯半径,更灵活的在狭窄的巷道内活动[1]。
1 自主行驶时的转向控制过程
地下铲运机为前后铰接车体,通过安装在前后车体的转向油缸伸缩,进而改变前后车体的铰接角,控制车体进行转向动作。
智能铲运机能根据多传感器融合技术对当前行驶环境和当前车身姿态进行实时监测,将数据提供给车载控制器进行决策。车载控制器根据当前环境和车身姿态计算铲运机横向位置偏差、航向角偏差、航向角变化量偏差等参数,自主行驶多参数偏差融合控制算法根据参数及预先设置的控制目标,计算铲运机的控制量:转向、油门、档位等。
自主行驶过程中最重要的是对转向的控制,地下铲运机通过中央控制器输出指令控制铲运机进行转向,进而实现自主行驶[2-3]。
具体控制过程为:控制器输出为0~128的数字量,通过A/D转换器转换为0~5V的电压信号,控制执行机构进行车辆转向。
控制系统的流程如图1所示:
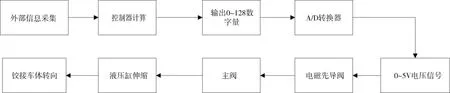
图1 转向控制流程图Fig.1 Flowchart of steering control
在实际控制中,当控制器给出的数字量小于一定值时,车体不动作,直接影响了车辆的控制精度,为提高车辆的控制精度,需要对控制过程中的死区现象进行分析,减小死区现象对自主行驶控制精度的影响。
2 死区产生的原因
死区现象主要由两方面的原因造成:阀块本身的死区及车辆转向死区。
1)阀块死区
在液压系统中,阀块的死区非线性特征普遍存在,对高精度的控制系统影响较大,但如果从制造中消除死区其成本又太大。故一般是建立模型,通过试验确定执行元件的死区参数,在后续控制过程中进行优化,降低死区的影响。
三位比例阀的中位一般有重叠,当阀芯在中位时,一定范围内,比例阀对于输入信号的变化不产生输出上的变化,仍保持在中位,此现象称为阀块的死区特征,如图2所示。
图中:v为液压电池阀的输入电压;u为液压电磁阀的输出压力;f(v)为电池阀输出压力与输入电压的函数关系;
通常情况下,a≠b,f1(v)≠f2(v),一般这种现象称为阀块死区非线性特征[4]。
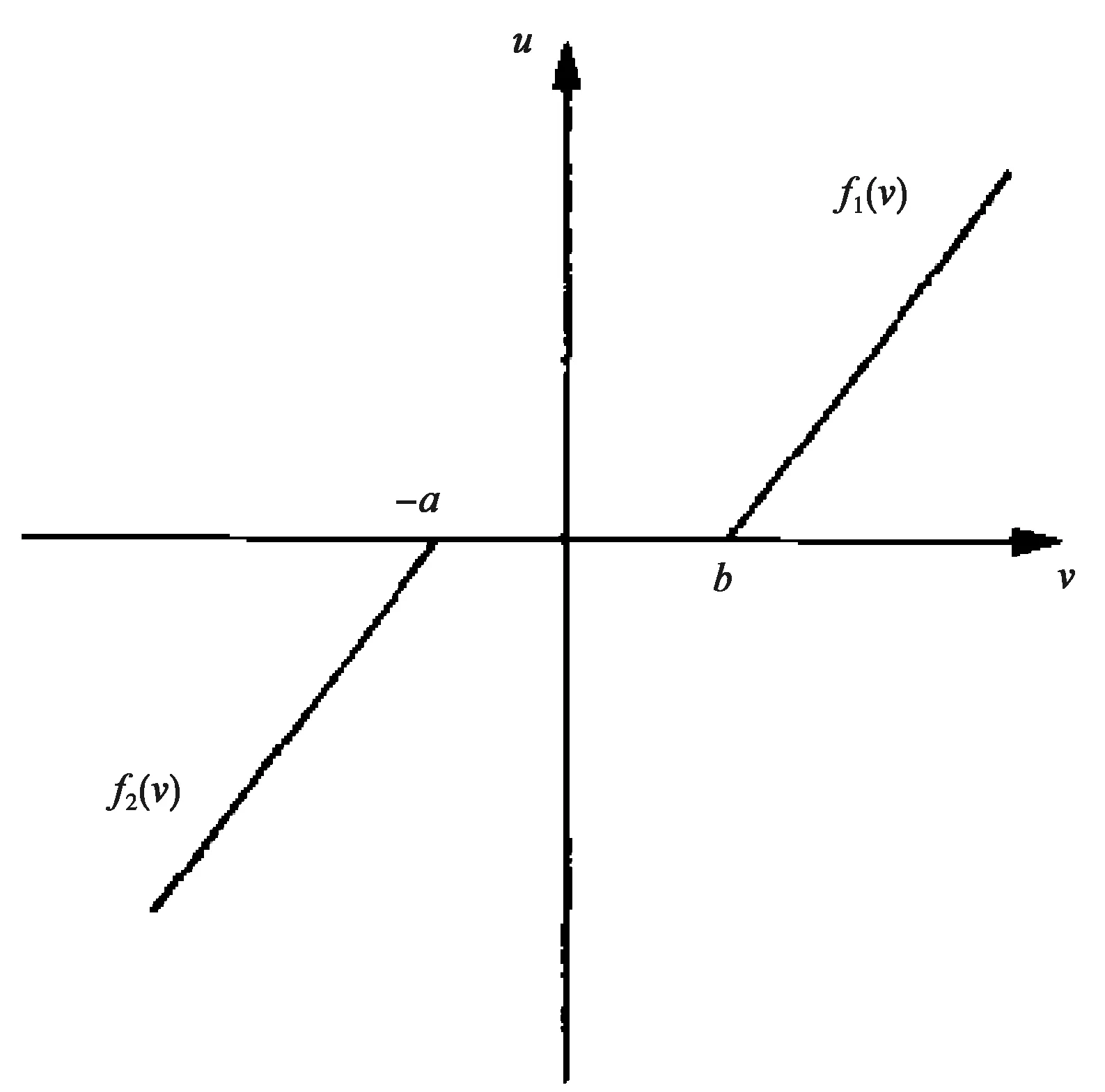
图2 阀块死区非线性特征Fig.2 Nonlinear Characteristic of valve block dead zone
2)车辆转向死区
在车辆实际转向时,转向力矩必须大于车辆的转向阻力矩,车辆才会转向,根据铰接车辆转向运动学动力学特性,车辆的转向力矩由液压缸提供,当向同一方向转向时,缸内面积不变,液压缸的驱动力随着压力升高而增大,当液压缸提供的转向力矩足够大时,车辆才能转向[5-6]。
此次试验对象对KCY-2型两立方铲运机,其简化的结构如图3所示。
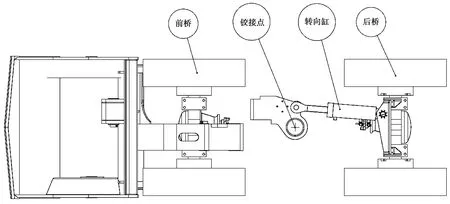
图3 铲运机结构图Fig.3 LHD structural chart
铲运机满斗时前桥负荷大,其简化转向阻力模型如图4所示。其中T为转向力矩,ωF,ωR分别为前桥和后桥的阻力矩,Fr为后桥所受切向力,L1和L2分别为铰接中心距离前后桥的距离。
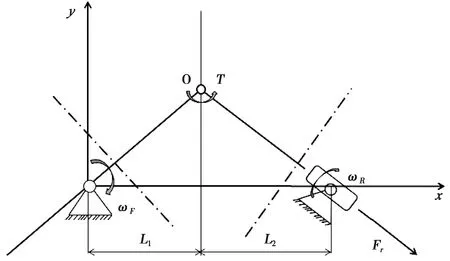
图4 转向阻力矩图Fig.4 Steering resistance torque chart
3 死区测试
由于转向死区的存在,虽然控制系统向液压电池阀发送了0~128的数字信号,但实际上,只有当车体实际开始转向时,这个信号才是有效信号。当控制器发出低于此信号的数值时,虽然控制系统发出了指令,但实际上车辆并没有任何实际动作响应,故上述信号是无效信号,其会影响控制系统的精度,进而降低自主行驶时的稳定性。
车辆液压油油温稳定,接近正常工作状态;地面为水泥地面。对车辆原地转向死区进行了测试,逐步加大控制器的输出信号数值,以车体实际转角发生变化为准,记录数据见表1,左右转时,不同铰接角下开始转向时的输出信号数值的变化规律如图5所示。
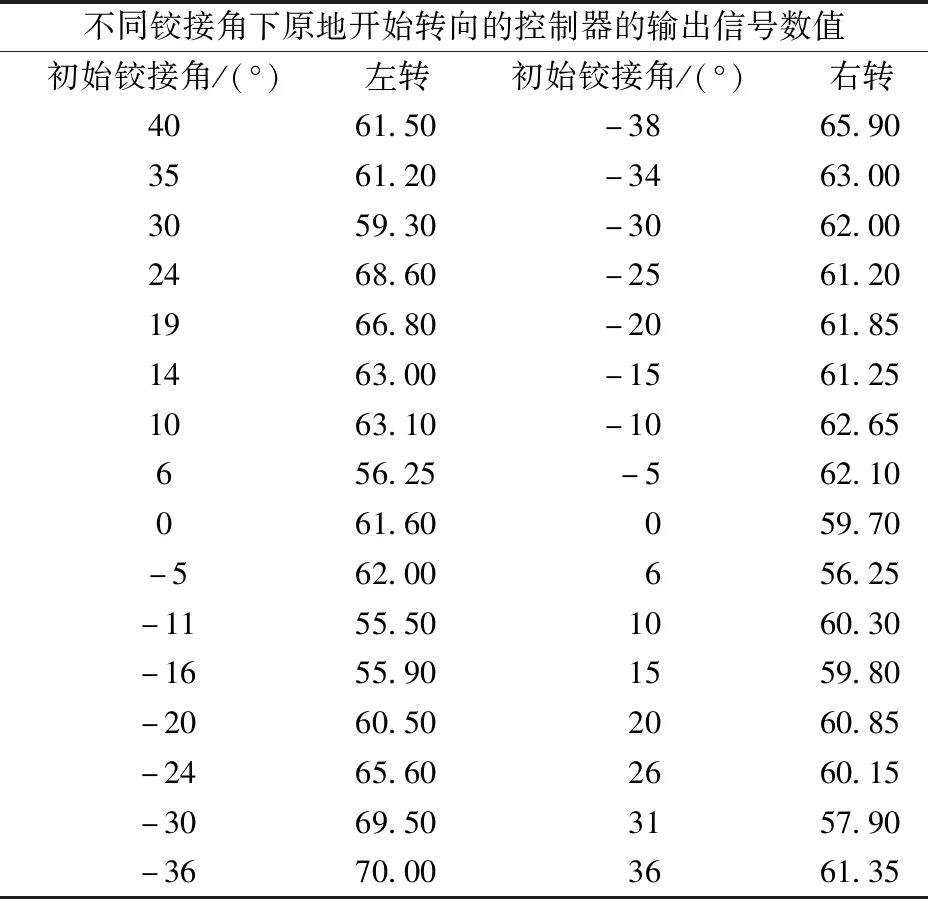
表1 原地转向数值
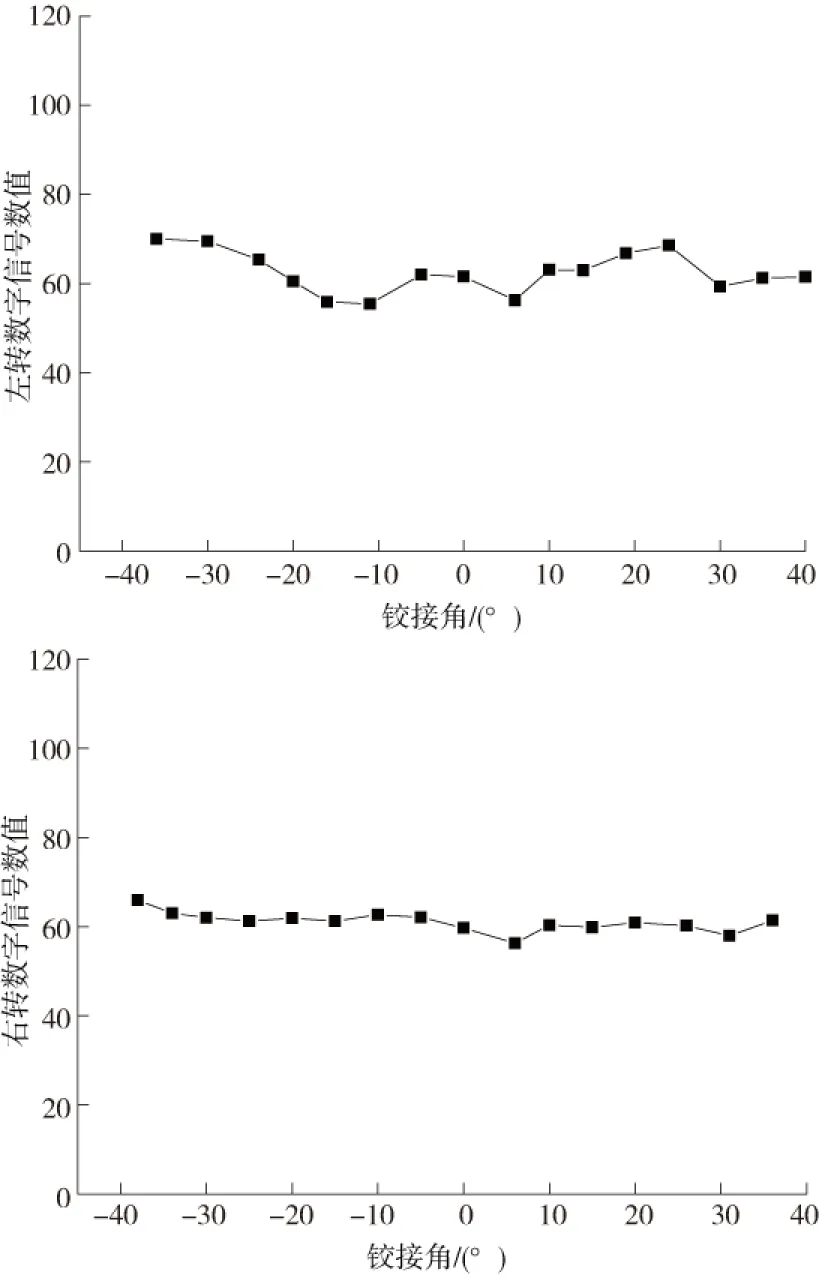
图5 原地转向数值Fig.5 Pivot steering data
上述两条曲线对于0~128的区间来说变化较为平缓,为了便于后续车载控制器的计算,取均值进行拟合计算。
控制器在自主行驶时,输出0~128的转向信号,用以控制转向油缸伸缩进而控制车身姿态。根据上述试验结果,左转时,不同铰接角下车体开始转向的电压信号值均值为62.5;右转时,不同铰接角下车体开始转向的电压信号值均值为60.8。但车体实际响应区间为左转:62.5~128;右转60.8~128;控制算法计算出的转向数值为x,实际系统输出转向值为y,对相应的函数进行修正:
4 实车测试
以2立方地下铲运机为测试对象,采用综合偏差控制算法进行控制,将巷道弯曲变化情况,车身转向角变化情况,激光扫描器前后安装位置情况及航向位置偏差情况进行全面综合,以综合偏差为0为控制目标[7-8]。
以6 km/h的速度进行铲运机自主行驶测试,转向死区未修正之前,以车辆前桥的中心点为定位点的行驶偏差如图6所示。
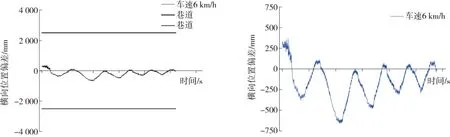
图6 修正前行驶偏差Fig.6 Running deviation before correction
以6 km/h的速度进行铲运机自主行驶测试,在使用上述函数对控制器输出进行修正后,以车辆前桥的中心点为定位点的行驶偏差如图7所示,克服死区对自主行驶控制的影响后,自主行驶情况明显改善,对于目标中线的跟踪效果更好。
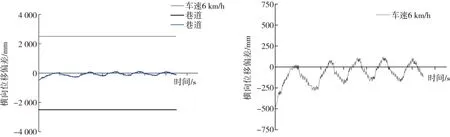
图7 修正后行驶偏差Fig.7 Running deviation after correction
5 结论
通过试验研究表明,在地下铲运机实际自主行驶测试的过程中,转向死区实际存在,并对自主行驶产生不利影响;通过对地下铲运机转向死区的测试,得到转向死区对应的电信号值,之后通过对转向死区的修正,能明显改善自主行驶的控制效果,提高控制精度及速度。
猜你喜欢
有色金属(矿山部分)(2021年4期)2021-08-30 06:10:54
工程数学学报(2020年6期)2021-01-09 02:44:40
通信电源技术(2018年3期)2018-06-26 08:05:42
电气化铁道(2017年1期)2017-04-16 06:00:17
航空兵器(2016年5期)2016-12-10 17:14:13
电力系统及其自动化学报(2016年5期)2016-12-01 03:13:00
焊接(2015年1期)2015-07-18 11:07:33
焊接(2015年1期)2015-07-18 11:07:33
金属矿山(2014年7期)2014-03-20 14:19:57
机械制造与自动化(2014年1期)2014-03-01 04:21:44
