
基于全尺寸模型的半主动悬架车辆平顺性研究
2019-06-13 01:18:32周军超胡光忠
重庆交通大学学报(自然科学版) 2019年6期
周军超,唐 飞,胡光忠
(1. 四川轻化工大学 机械工程学院,四川 自贡 643000; 2. 过程装备与控制工程四川省高校重点实验室,四川 自贡 643000;3. 重庆交通大学 轨道交通研究院, 重庆 400074)
0 引 言
汽车悬架系统是提高车辆行驶平顺性、操纵稳定性、驾驶安全性及减少零部件损坏的关键。被动悬架系统,其刚度系数和阻尼系数值如随意改变会使减振性能变差,从而限制车辆性能,逐渐被淘汰[1-2]。 半主动悬架由于其优越的自适应能力,且结构简单,能耗小,成为新的悬架研究趋势[3-5]。秦也辰等[6]以实现悬架的自适应半主动控制为研究对象,基于多目标优化算法及路面识别方法,对车辆平顺性与操纵稳定性进行研究。H. REN等[7]基于车辆的乘坐舒适性和操纵稳定性,提出一种改进的虚拟半主动参考模型,并采用滑模变结构控制器对该模型进行分析。SHI. HONGYAN等[8]对基于模糊 PID控制策略的汽车主动悬架控制策略进行了研究,有效改善了典型路面随机振动条件下汽车的振动幅度和速度,大幅改善乘坐舒适性和操纵稳定性,具有一定应用价值,但效率不高。
针对现有研究存在的平顺性研究基于动力学方程模型,对半主动悬架的单一种控法无法令系统的所有性能达到最优,经常会出现某一个或者某几个性能有所提高,另一些的性能就相对下降的问题。笔者首先建立了二自由度1/4车车辆的悬架车辆的1∶1全尺寸的物理模型,然后在Matlab/Simulink中建立车辆悬架自适应模糊PID控制模型,运用联合仿真手段,对控制算法在随机路面激励下的振动进行分析并与被动悬架以及PID控制做对比验证,对半主动悬架车辆的平顺性进行分析,以期待提高开发效率。
1 全尺寸半主动悬架动力学模型
1.1 二自由度全尺寸悬架模型
车辆悬架是一个复杂的多输入多输出系统,为了更好的与车辆实际行驶情况相吻合,建立全尺寸悬架模型进行研究。简化后的二自由度悬架模型如图1,悬架参数如表1[9]。全尺寸半主动悬架模型如图2。
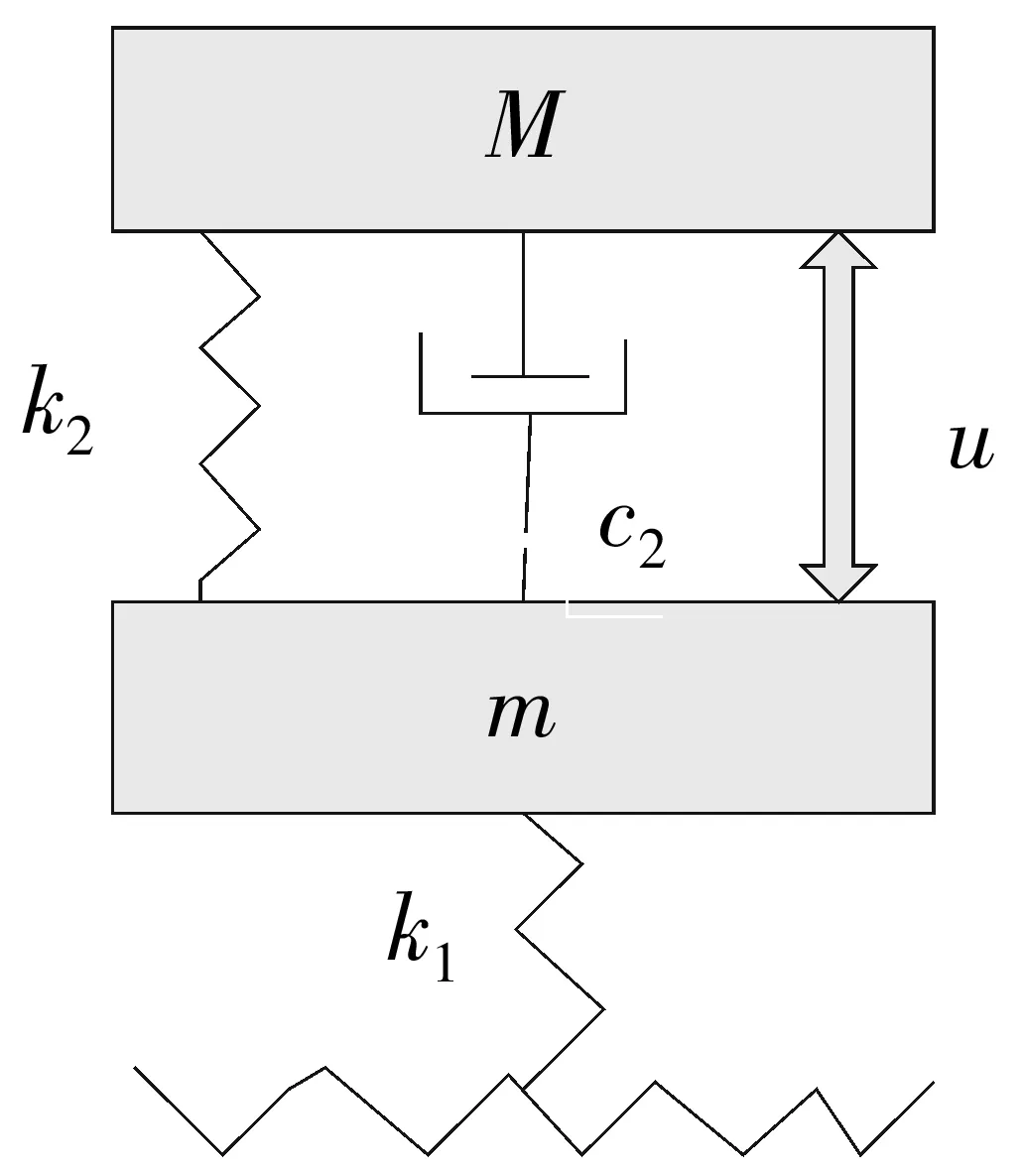
图1 二自由度悬架模型Fig. 1 Two-degree-of-freedom suspension model
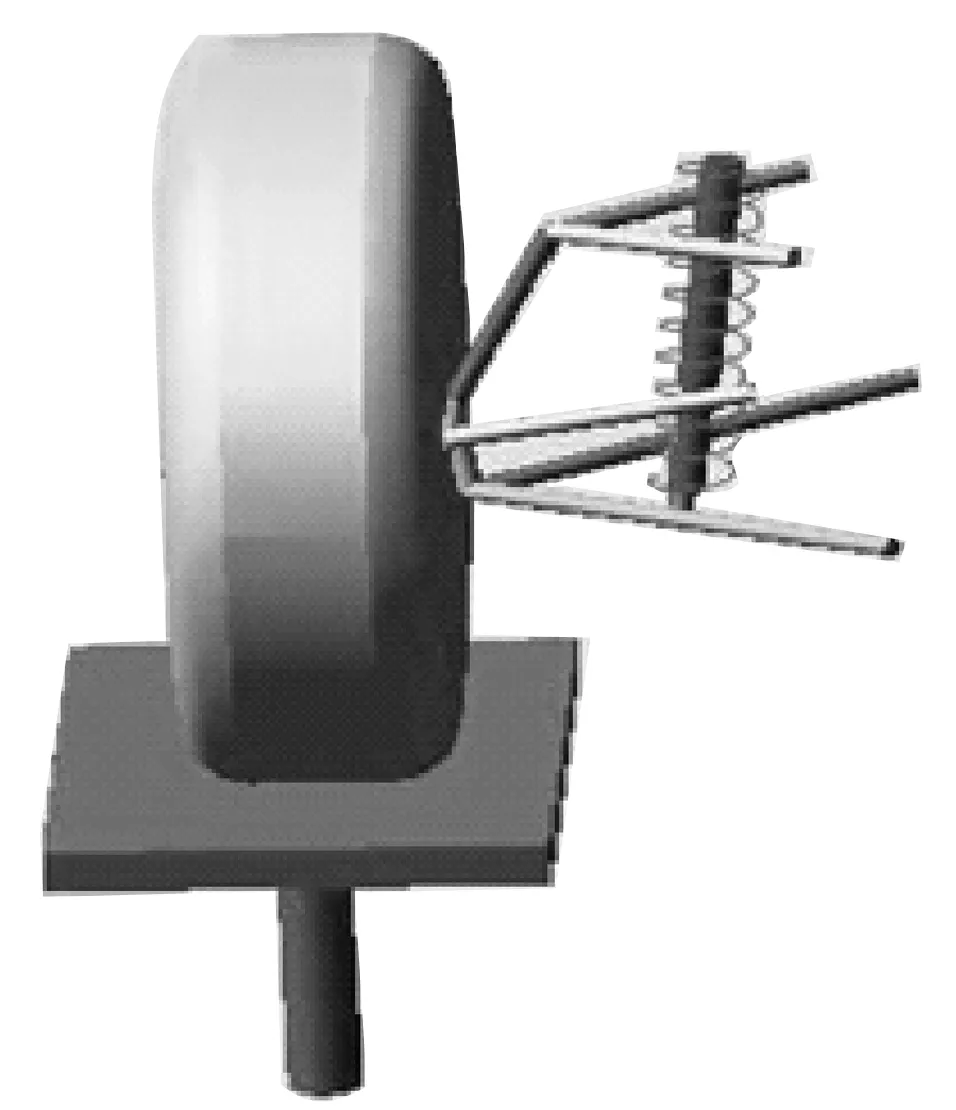
图2 全尺寸半主动悬架模型Fig. 2 Semi-active suspension model of full size
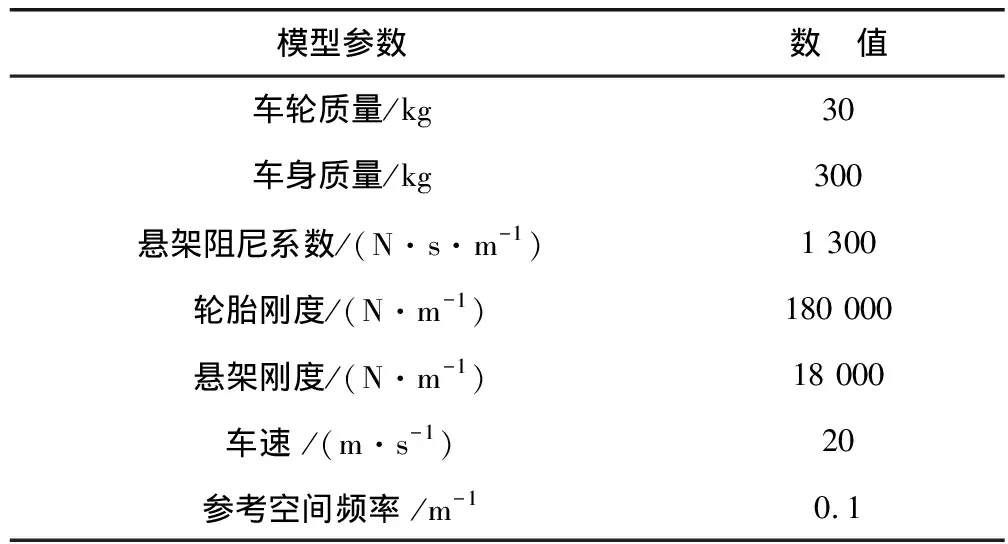
/kg30/kg300/(N·s·m-1)1 300/(N·m-1)180 000/(N·m-1)18 000 /(m·s-1)20 /m-10.1
半主动悬架的动力学方程如式(1):
(1)
1.2 路面模型
由于路面不平度是随机序列在时间产生的随机变量,因此很难得到两个完全相同的路面轮廓曲线(或不平度函数),路面不平度垂直速度和垂直加速度的谱密度公式分别为[10]:
(2)
(3)
在我国比较常见的是C级公路,故对C级公路进行分析(设置的车速为v=20 m/s)。
2 自适应模糊 PID 控制基础
PID控制是利用相对于控制误差的比例、积分、微分3种动作来决定受控对象的操作量。PID 控制规律的数学表达式如式(4):
(4)
式中:KP、KI、KD分别为调节器的比例系数、积分系数和微分系数;TI、TD分别为调节器的积分和微分时间;其中KI=KP/TI;KD=KPKD。
模糊PID控系统的输入为车身的速度及其变化量,输出为主动控制力。
KP=KP0+ ΔKP
(5)
KI=KI0+dΔKI
(6)
KD=KD0+ ΔKD
(7)
式中:KP0、KI0、KD0分别为未校正前 PID 控制器的初始参数;ΔKP、ΔKI、ΔKD分别为模糊控制器输出,即自适应模糊PID控制器经在线校正所得的模糊整定系数。
自适应模糊PID算法的优势在不破坏原有的PID的控制的基础上,仅针对系统跟踪误差对PID参数进行实时调节,从而实现对参数的时变或非线性控制。自适应模糊PID控制结构原理如图3。
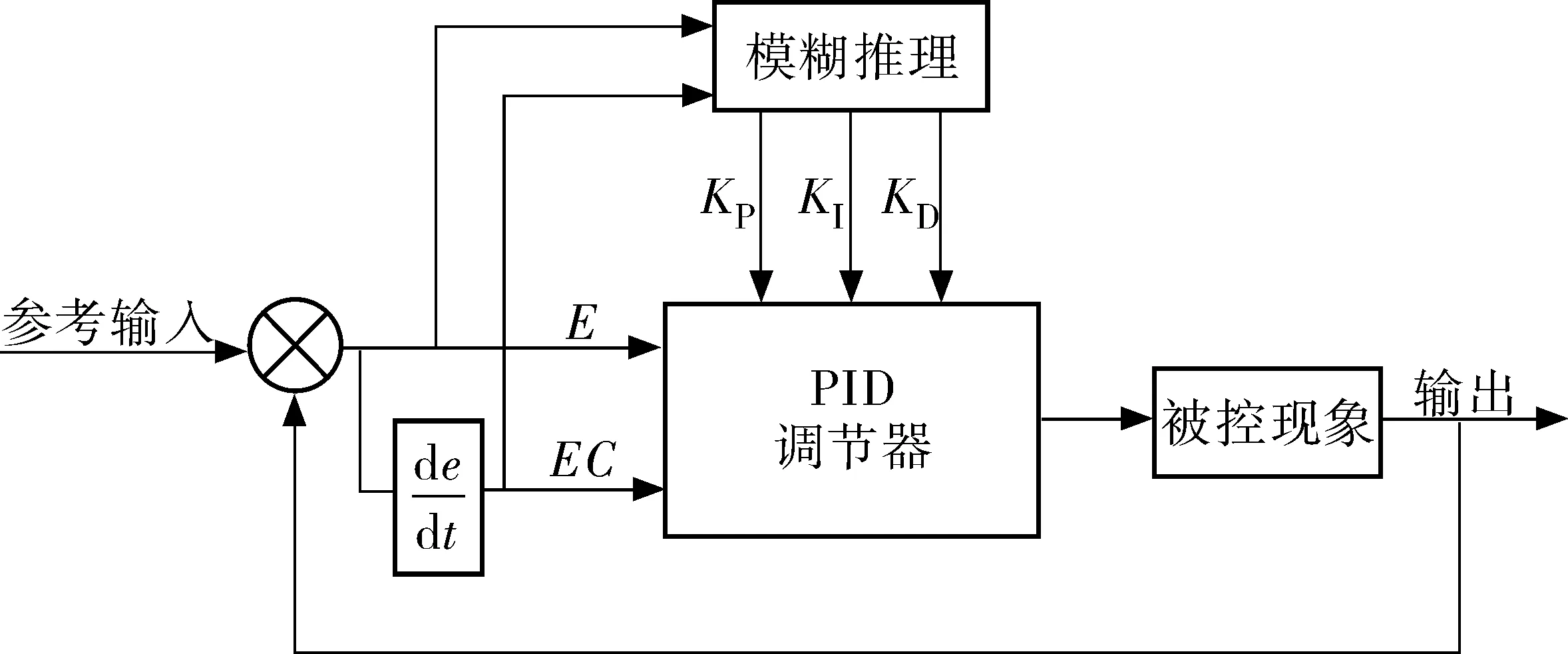
图3 模糊控制系统Fig. 3 Fuzzy control system
考虑到笔者建立的半主动悬架PID模糊控制系统显著的非线性且连续的特点,因此隶属度函数选择三角函数。对输入信号,采用模糊子集来描述,输入变量E为速度差,EC为E的导数。E、EC的取值范围相同,均为{NB,NM,NS,PS,PM,PB}。选取模糊变量的隶属函数输入变量E、EC的隶属度函数如图4[5]。
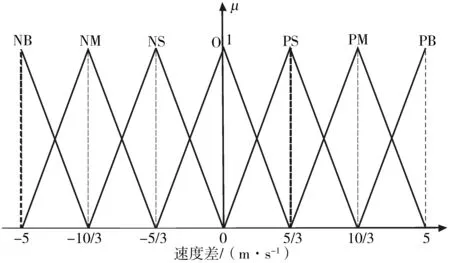
图4 模糊变量E、EC隶属函数Fig. 4 Membership function of fuzzy variable E and EC
模糊推理控制规则观察图和模糊推理输出隶属度函数,如图5。
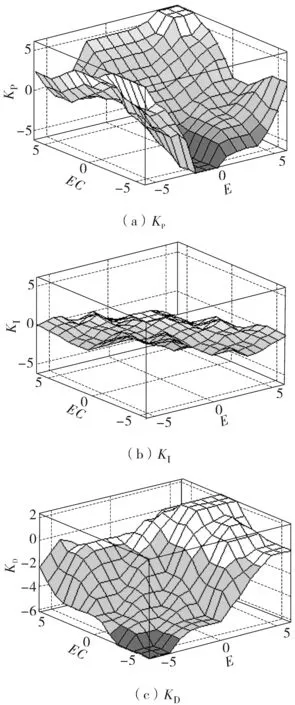
图5 KP 、KI、KD模糊输出隶属度函数Fig. 5 Fuzzy output membership function KP ,KI,KD
3 分析与讨论
仿真中,假定车辆以v=20 m/s在C级路面上直线行驶,仿真时间为10 s。选择车身加速度、悬架弹簧的动行程、轮胎动位移作为评价汽车平顺性的主要指标[11]。
仿真结果是被动悬、模糊控制半主动悬架、自适应模糊PID控制半主动悬架3种进行对比,以此来分析此次仿真的结果,见图6。
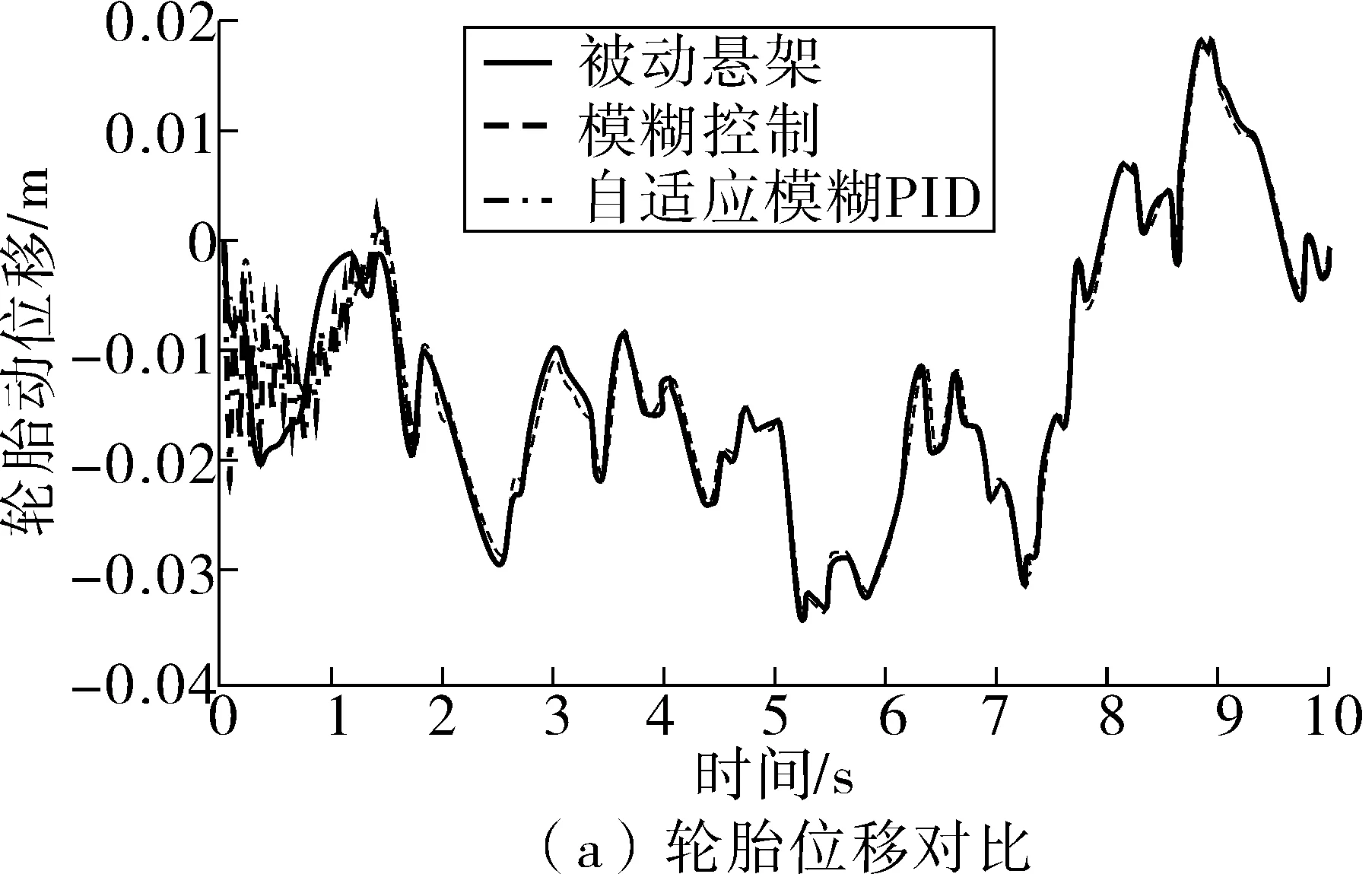
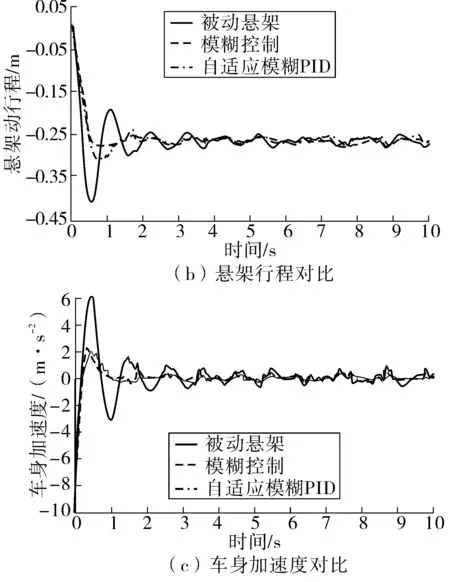
图6 轮胎位移、悬架行程及车身加速度对比Fig. 6 Comparison of tire displacement, suspension stroke andvehicle body acceleration
由图6可见:① 采用自适应模糊PID半主动悬架轮胎位移的峰值有增大的趋势,然而相对模糊控制以及被动悬架,采用自适应模糊PID控制策略后增加幅度较小,对行驶平顺性没有较大影响;② 采用自适应模糊PID半主动悬架行程的峰值也有所减少,有效的降低了由于弹性系统引起的振动;③ 采用自适应模糊PID控制策略的半主动悬架相对采用模糊控制的半主动悬架以及被动悬架,车身加速度峰值显著减小,对于汽车行驶平顺性和舒适性有较大程度改善,而且采用自适应模糊PID控制方法比单纯采用模糊控制的效果更好。悬架仿真结果对比如表2。
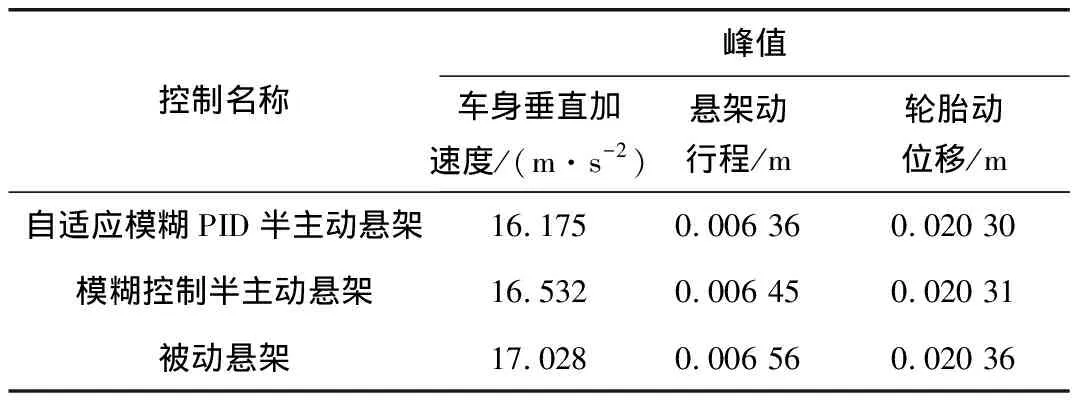
表2 悬架仿真结果对比Table 2 Comparison of suspension simulation results
采用自适应模糊PID控制的半主动悬架与采用模糊控制半主动悬架和被动悬架相比较,各评价指标的均方根在一定程度上都有降低:车身加速度峰值分别降低了5.0%和2.9%,悬架动行程分别降低了3.14%和1.68%,轮胎动位移分别降低了0.29%和0.25%,提高了车辆行驶平顺性。
综上所述,采用自适应模糊PID控制的半主动悬架在汽车性能方面,明显优于被动悬架和模糊控制的半主动悬架。而且在峰值方面,自适应模糊PID半主动悬架的峰值低于其余两种,自适应模糊PID控制算法的半主动悬架性能远超出模糊控制的半主动悬架以及被动悬架。图6可以看出,被动悬架的波动是非常大,自适应模糊PID控制的半主动悬架波动较小,说明了自适应模糊PID控制算法对车辆的平顺性是非常优越的。从响应时间来看,采用自适应模糊PID的车身加速度和悬架动行程的响应时间为2 s,而被动悬架的响应时间为4 s,响应时间提高了50%。
通过以上3组数据的对比,采用自适应模糊PID控制的半主动悬架的性能明显优于其余两种,因而采用自适应模糊PID控制的半主动悬架的车辆,在行驶的平顺性以及乘坐的舒适性上面,都是远高于其余两种的。
4 结 语
为改善车辆的平顺性,笔者基于二自由度1/4车辆的全尺寸动力学模型基础上,提出一种半主动悬架的自适应模糊PID控制算法。结果表明,采用自适应模糊PID控制策略的半主动悬架相对采用模糊控制的主动悬架以及被动悬架,车身加速度峰值分别降低了5.0%和2.9%,悬架动行程分别降低了3.2%和1.68%,轮胎动位移分别降低了0.29%和0.25%。对于汽车行驶平顺性和舒适性有较大程度改善。研究结果表明,采用自适应模糊PID控制的全尺寸模型的半主动悬架控制较传统模糊控制,能更好的满足车辆平顺性的要求,为研究车辆平顺性研究提供一种有效方法。
猜你喜欢
装备制造技术(2020年11期)2021-01-26 00:38:58
装备制造技术(2020年2期)2020-12-14 03:09:28
今日农业(2019年12期)2019-08-15 00:56:32
西南交通大学学报(2016年3期)2016-06-15 20:29:35
电子制作(2016年21期)2016-05-17 03:53:01
通信电源技术(2016年5期)2016-03-22 01:09:57
中国石油大学学报(自然科学版)(2015年2期)2015-11-10 06:08:17
电源技术(2015年11期)2015-08-22 08:50:38
振动、测试与诊断(2014年6期)2014-03-01 01:14:59
江苏大学学报(自然科学版)(2014年6期)2014-02-28 01:32:32
