
基于相关性相位提取的超声电机频率控制技术
2019-06-11 08:27安国庆安孟宇杨少锐刘庆瑞李争
河北科技大学学报 2019年2期
安国庆 安孟宇 杨少锐 刘庆瑞 李争

摘要:为了解决温度和负载的变化容易引起超声电机转速波动,以及基于转速反馈的闭环控制因转速传感器安装体积和成本在某些特种场合应用受限的问题,提出一种基于相位差信息反馈的频率闭环控制方法:首先,根据电机各类相位差对温度和负载变化的敏感程度,优化选择了相位差反馈量的类型;其次,针对系统机械噪声以及驱动器谐波对相位差计算结果的影响,利用改进的相关性相位提取方法准确提取驱动电压和孤极电压的基频相位差信息;最后,分别就超声电机运行过程中温度和负载变化的情况,给出了相应的频率闭环控制方案。实验结果表明,所提出的方法能有效降低温度以及负载变化导致的转速波动,可提升电机所在系统的转速稳定性。由于其只需采样两路电压信号,故易于工程实现。
关键词:电机学;超声电机;相位差;闭环控制;相关性分析
中图分类号:TM3599文献标志码:A
Abstract:In order to solve the problems that the speed of ultrasonic motor is usually affected by the changes of temperature and load, and that due to installation volume and cost of the speed sensor, the closed-loop control based on speed feedback is often limited in some special applications, a frequency closed-loop control method based on phase difference feedback is introduced. Firstly, the type of phase difference feedback quantity is optimally selected according to the sensitivity of different motor phase differences to the temperature and load change; secondly, aiming to the interference of mechanical and harmonic noises on phase difference calculating result, the correlation phase extraction method is proposed to improve the accuracy of phase difference between driving voltage and monitor electrode voltage; lastly, the corresponding frequency closed-loop control scheme is given according to the changes of temperature and load change, respectively. Experiment results indicate that this method can reduce the speed fluctuations caused by the changes of temperature and load, and improve the speed stability of motor system. Because only two voltage signals are needed to be recorded, this method is easy for implementation.
Keywords:electric machinery;ultrasonic motor;phase difference;closed-loop control;correlation analysis
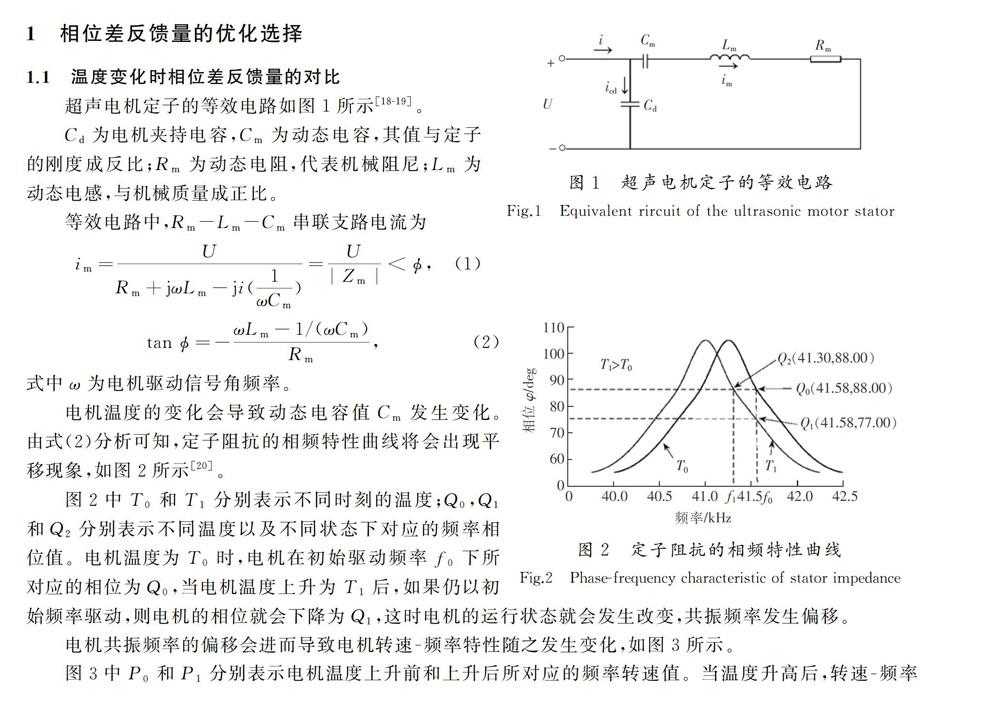
超声电机具备低速高转矩、快速响应、无电磁噪声、断电自锁等优良特性[1-2],在医疗设备、光学仪器、机器人驱动,航空航天以及新型军事装备等领域应用广泛[3-6]。当电机温度发生变化时,其谐振频率将会发生偏移[7]。当驱动频率不能很好地跟踪谐振频率变化时,会导致其转速下降,效率降低[8]。此外,超声电机的机械特性相对偏软,当转轴上的负载变化时,其转速会产生较大波动,大大降低了电机所在系统的可靠性[9]。基于转速监测的闭环反馈控制可以较好地补偿转速的变化,但轉速传感器一方面增加了超声电机所在系统的体积,另一方面使高精度的编码器增加了系统成本[10]。近年来,基于非转速反馈的超声电机频率闭环控制技术成为了许多学者研究的热点,其中基于孤极电压反馈法和基于驱动电压驱动电流锁相法逐渐成为了频率跟踪控制的主流[11-13]。文献[14]提出了基于孤极反馈的跟踪方法,推导出了行波型超声电机定子上孤极传感器反馈电压与其转速之间的关系,并利用这一关系控制了电机的转速。文献[15]提出了基于驱动电压反馈的频率跟踪技术,使驱动电压恒定让电机运行趋于稳定,但是单纯以孤极电压或驱动电压作为反馈信号很难同时满足效率、转矩等指标要求。文献[16]提出基于驱动电压和驱动电流相位差反馈的方法实现频率跟踪控制,设计了超声电机相位差负反馈闭环控制器,改善了温度等外界因素变化对电机运行转速波动的影响,但由于超声电机的信号频率较高,电流信号相对于电压信号不易测取而导致反馈误差容易偏大。文献[17]提及驱动电压和孤极电压相位差与定子阻抗特性的变化具有一致性,且被监测信号同为电压信号,测取方法简单易于工程实现,具有较大的研究空间。
技术本文针对超声电机多应用于特种场合的实际情况,为避开编码器给超声电机控制系统带来的安装体积和成本问题,拟选用相位差信息作为反馈量进行频率闭环控制。根据电机温度及负载变化时电机不同相位差信息的变化规律,优化选择反馈量,并提出一种能够准确提取基频相位差信息的方法,以实时调节驱动频率,补偿电机温度及负载变化对电机转速带来的不良影响。
1.1溫度变化时相位差反馈量的对比
1.2负载变化时相位差反馈量的对比
型号为TWUSM-60的行波型超声电机测得的机械特性如图5所示。
超声电机厂家一般推荐按最大转矩为1.5倍实际负载转矩的原则进行电机选型。由图5可知,电机在实际负载(2/3Tmax)处的转速变化率为38%。可见超声电机的机械特性较软,且呈非线性变化,转速易受负载波动的影响,使得超声电机所在系统的可靠性大大降低。
为探究电机相位信息随负载的变化规律,开环状态下,在最大转矩范围内改变负载,观察驱动电压和驱动电流的相位差以及驱动电压和孤极电压的相位差随负载变化趋势,如图6所示。
2相关性相位提取法
在基于相位差反馈的频率闭环控制中,准确提取两信号基频相位差是信号检测的关键。但一方面超声电机的孤极电压为陶瓷晶体利用压电效应产生的电压信号,常夹杂有电机所在机械系统的背景振动噪声;另一方面电机驱动器由于变频需求含有大量开关器件,产生较多的谐波噪声。采用传统的“过零法”提取相位差信息误差较大。针对以上问题,利用改进的相关性相位提取法,以获取驱动电压和孤极电压的基频相位差信息,具体方法如下。
3控制系统构建及实验方案
3.1控制系统构建
3.2电机温度变化时的实验方案
步骤1:记录在某初始温度下驱动电压和孤极电压的相位差信息,并将其作为相位差设定值;
步骤2:实时采集驱动电压和孤极电压信号,利用相关性相位提取法实时计算两者相位差;
步骤3:将相位差计算值和设定值比较,计算偏差值。此时对频率自动调节进行闭环控制,当相位差计算值大于设定值时,提升驱动频率,减小相位差;当相位差计算值小于设定值时,降低驱动频率,增大相位差,直至偏差量小于设定阈值为止。
3.3电机负载变化时的实验方案
4实验结果及分析
选用型号为TWUSM-60的行波型超声电机作为被控对象,选用配套的驱动器进行变频控制;将磁粉制动器作为其负载,利用张力控制器进行负载调节;转矩转速传感器型号为CYT-303,可实时监测电机的转矩与转速。采用自制的信号调理电路,信号采集卡型号为Handyscope HS4,电机驱动电压峰峰值为315 V,所构建的超声电机实验平台如图8所示。
4.1温度变化时闭环反馈控制结果
4.1.1环境温度变化时闭环反馈控制结果
测得电机在-15 ℃时,驱动频率为41 200 Hz,驱动电压和孤极电压初始相位差为83.4°,本实验将此作为相位差初始设定值。利用高低温交变试验箱模拟环境温度的变化,在电机允许范围内对温度进行连续调节,在此过程中进行闭环控制。开环与闭环时转速的变化情况如图10所示。
由图10可知,当温度由-15 ℃变化至45 ℃时,开环控制情况下,电机的转速由100 r/min下降至62 r/min;闭环控制情况下,电机的转速由100 r/min下降至95 r/min,转速速降由38%降至5%。由此可见,基于驱动电压和孤极电压相位差反馈的闭环控制方法,有效地降低了温度对电机的影响。
4.1.2电机温升变化时闭环反馈控制结果
实际上,超声电机在运行过程中由于各种损耗的存在会产生发热的情况。实验在20 ℃的室温环境下令电机空载运行。利用红外测温的方法监测电机连续运行时,电机定子表面温度随时间的变化情况,如图11所示。
由以上实验结果可知,电机的表面温度由25 ℃变化到39.1 ℃。开环控制情况下,电机的转速由75 r/min下降至65 r/min;闭环控制情况下,电机的转速由75 r/min下降至72 r/min,转速速降由13.3%降至4%。由此可见,基于驱动电压和孤极电压相位差反馈的闭环控制方法,有效地降低了电机自身温升对转速的影响。
4.2负载变化时闭环反馈控制结果
经测试,电机的最大转矩为0.85 N·m。调节负载分别至空载、轻载、中载以及重载4个等级,分别通过改变驱动器频率,将转速调至空载转速n0。实验过程中在4个负载等级之间增加了3组数据以提高拟合精度。相应原始数据如表2所示。
由图14可知,电机加载到0.6 N·m时,开环情况下,转速由空载时的100 r/min降至60 r/min,转速变化率为40%;闭环情况下,转速由空载时的100 r/min降至95 r/min,转速变化率为5%;因此,基于驱动电压与孤极电压相位差反馈的闭环控制,能够降低由于负载变化而引起的转速波动,提高了电机对负载变化的抗扰能力。
5结语
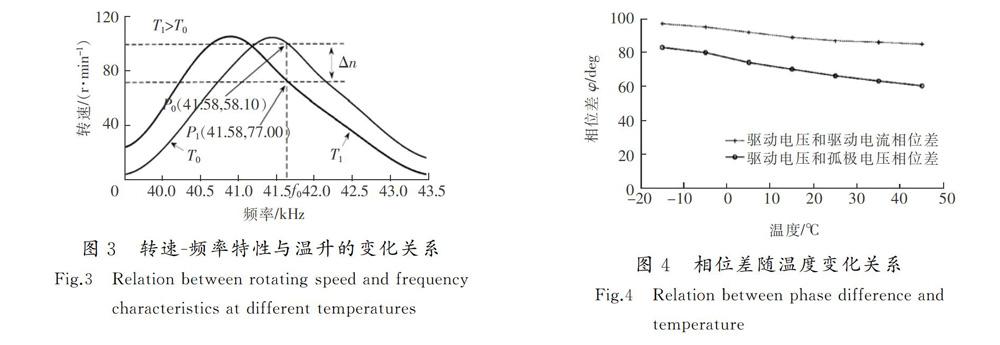
1)驱动电压与孤极电压的相位差相较于驱动电压和驱动电流相位差对温度变化以及负载变化更为敏感,可将前者作为反馈量用于超声波电机的频率闭环控制。
2)改进的相关性相位提取法可有效滤除机械噪声和驱动器谐波对相位差计算结果的影响,提高相位差提取和闭环控制准确度。
3)基于驱动电压和孤极电压相位差反馈的频率闭环控制方案可降低环境温度以及负载变化对电机转速输出的影响,提高电机所在系统的稳定性。
4)本文对超声波电机频率控制技术的研究仍然存在许多不足之处。相关性相位算法在改进以及创新方面还有很大的提升空间,超声波电机在实际应用中会运行在各种复杂环境中,对电机闭环控制的要求会更多,难度也会大大增加。今后将在这些方面继续做深入的研究。
参考文献/References:
[1]牛子杰,孙志峻,陈超,等. 基于响应面模型与自适应遗传算法的中空型行波超声电机柔性转子结构优化[J]. 中国电机工程学报,2014,34(30):5378-5385.
NIU Zijie, SUN Zhijun, CHEN Chao, et al. Optimization of the rotor structure of a hollow traveling wave ultrasonic motor based on response surface methodology and self-adaptive genetic algorithm[J]. Proceedings of the CSEE, 2014, 34(30): 5378-5385
[2]张军,时运来,梁大志,等. 直线超声电机驱动精密二维定位平台系统[J]. 中国电机工程学报,2014,34(18):2960-2966.ZHANG Jun, SHI Yunlai, LIANG Dazhi, et al. A 2-D precision positioning table system driven by linear ultrasonic motors[J]. Proceedings of the CSEE, 2014, 34(18): 2960-2966.
[3]夏长亮,徐绍辉,史婷娜,等. 基于遗传算法的超声波电机模糊自适应速度控制[J]. 中国电机工程学报,2003,23(3):99-103.XIA Changliang, XU Shaohui, SHI Tingna, et al. Fuzzy adaptive speed control for ultrasonic motor based on genetic algorithm[J]. Proceedings of the CSEE, 2003,23(3):99-103.
[4]STEPANENKO D A,MINCHENYA V T.Development and study of novel non-contact ultrasonic motor based on principle of structural asymmetry[J]. Ultrasonics, 2012,52(7):866-872.
[5]李争,郭鹏,高世豪.环形超声波电机的特性分析与实验研究[J].微电机,2018,51(5):17-21.LI Zheng, GUO Peng, GAO Shihao. Characteristic analysis and experimental study of ring ultrasonic motor[J]. Micro motors, 2018, 51(5): 17-21.
[6]张龙.基于DSP的行波型超声波电机驱动控制系统的研究[D].杭州:浙江大学,2004.ZHANG Long. Research on Drive Control System of Traveling Wave Ultrasonic Motor Based on DSP[D]. Hangzhou:Zhejiang Univer-sity, 2004.
[7]王光庆,郭吉丰.超声波电机频率-温度特性研究[J].电机与控制学报,2008,12(6):675-679.WANG Guangqing, GUO Jifeng. Research on the frequency-temperature characteristics of the ultrasonic motor[J]. Electric Machines and Control, 2008,12(6): 675-679.
[8]曾劲松,姚志远,赵淳生.超声电机中的非线性现象研究[J].中国机械工程,2006,17(10):1047-1051.ZENG Jinsong, YAO Zhiyuan, ZHAO Chunsheng. Research on non-linear phenomena in ultrasonic motor[J]. China Mechanical Engineering, 2006,17(10): 1047-1051.
[9]陈胜,雷向红.超声电机的阻抗角特性及其控制技术研究[J].机电信息,2013,15:94-95.CHEN Sheng, LEI Xianghong. Research on impedance angle characteristics of ultrasonic motor and its control technology[J]. Journal of Mechanical And Electrical Information, 2013, 15:94-95.
[10]李華峰,丁庆军,陈超.超声电机启动可靠性研究[J].中国电机工程学报,2013,33(9):138-145.LI Huafeng, DING Qingjun, CHEN Chao. Research on startup reliability of ultrasonic motors[J]. Proceedings of the CSEE, 2013, 33(9): 138-145.
[11]陈志华,赵淳生.一种简单实用的超声电机频率跟踪控制技术[J].压电与声光,2003,25(2):149-151.CHEN Zhihua, ZHAO Chunsheng. The control of resonant tracking of ultrasonic motor[J]. Piezoele Ctrics & Acoustooptics, 2003,25(2): 149-151.
[12]IZUNO Y, HOJO M, NAKAOKA M. Software-based adjusting P-I gain controller for speed-tracking servo system using traveling-wave type ultrasonic motor[C]// IEEE Industry Applications Society Annual Meeting.[S.l.]: Denver,1994.
[13]赵淳生,朱华.超声电机技术的发展和应用[J].机械制造与自动化,2008,37(3):1-9.ZHAO Chunsheng, ZHU Hua. Development and application of ultrasonic motors technologies[J]. Machine Building & Automation, 2008,37(3): 1-9.
[14]陈志华,赵淳生,黄卫清.行波型超声电机速度控制技术的研究[J].压电与声光,2005,27(4):427-430.CHEN Zhihua, ZHAO Chunsheng, HUANG Weiqing. Research on the speed control techniques of a traveling-wave-type ultrasonic motor[J]. Piezoelectrics & Acoustooptics, 2005,27(4): 427-430.
[15]王文浩,郭吉丰,胡锡幸,等.驱动电压跟踪的超声波电机频率自适应技术[J].中国电机工程学报,2010,30(27):36-41.WANG Wenhao, GUO Jifeng, HU Xixing,et al. A adaptive frequency tracking control strategy for ultrasonic motor using the driving voltage[J]. Proceedings of the CSEE, 2010, 30(27): 36-41.
[16]甘云华,金龙,胡敏强,等.基于锁相环的超声波电机频率跟踪控制技术[J].哈尔滨理工大学学报,2009,14(2):66-70.GAN Yunhua, JIN Long, HU Minqiang, et al. Frequency tracking technology of ultrasonic motor based on phase-locked loop[J]. Journal of Harbin University of Science and Technology, 2009, 14(2): 66-70.
[17]祖家奎,趙淳生.行波型超声电机频率自动跟踪控制技术评述[J].微电机,2004,37(6):47-50.ZU Jiakui, ZHAO Chunsheng. A review for frequency tracking control techniques of traveling wave ultrasonic motors[J]. Micro Motors, 2004,37(6): 47-50.
[18]SHI Jingzhuo,LV Lin,ZHANG Yu. Dynamic takagi-sugeno model for the control of ultrasonic motor[J]. Journal of Control Science and Engineering, 2011:1-9.
[19]顾菊平,秦申蓓,石斌,等.超声波电机测试技术的研究[J].电工技术学报,2003,18(1):21-26.GU Juping, QIN Shenbei, SHI Bin, et al. Research on testing techniques of ultrasonic motors[J]. Transactions of China Electrotechnical Society, 2003,18(1): 21-26.
[20]甘云华,金龙,王心坚,等.超声波电机自激振荡驱动电路的变频控制特性[J].中国电机工程学报,2008,28(9):93-97.GAN Yunhua, JIN Long, WANG Xinjian, et al. Characteristic of variable frequency control of self-oscillating driving circuit for utrasonic motor[J]. proceedings of the CSEE, 2008, 28(9): 93-97.
[21]AN Guoqing, LI Hongru. Stator and rotor faults diagnosis of squirrel cage motor based on fundamental component extraction method[J]. International Journal of Rotating Machinery, 2017: Article ID 1576381.
猜你喜欢
现代电子技术(2016年22期)2016-12-26
安徽农学通报(2016年21期)2016-12-22
时代金融(2016年29期)2016-12-05
中国市场(2016年40期)2016-11-28
商(2016年33期)2016-11-24
电脑知识与技术(2016年18期)2016-11-02
大学教育(2016年7期)2016-07-27
现代电子技术(2015年22期)2015-12-02
