
双频段机相扫雷达时间资源管理算法
2019-06-08 02:48李涛,戴伟
中国电子科学研究院学报 2019年12期
李 涛,戴 伟
(南京电子技术研究所,江苏 南京 210039)
0 引 言
为适应未来复杂作战环境的要求,对空监视雷达正在向多功能、一体化方向发展,除了传统的警戒和搜索功能外,还需要具备跟踪、识别,甚至是制导攻击的能力,因此在频段的选择上必须同时利用低频段的空域覆盖、隐身目标探测能力优势和高频段的高增益、高精度优势[1-4]。采用高、低频段搭配的双频段雷达(Dual Band Radar,DBR),可以做到优势互补,从而具备更强的任务适应性,因此成为美国海军下一代雷达的发展方向[5-7]。
与天线阵面固定的相控阵雷达不同,机相扫雷达通过阵面的机械旋转完成全空域覆盖,同时也能够调度雷达波束对目标进行跟踪,机相扫雷达具有以下优点[8-9]:
(1)通过减少天线阵面个数,显著降低系统成本;
(2)对任何方向的目标都能够使用阵面的法线波束探测,不存在波束展宽带来的天线增益和探测精度损失。
与此同时,机相扫雷达的天线旋转特性也带来了资源管理算法的以下复杂性:
(1)天线旋转会导致目标间歇性地出现在雷达天线的扫描范围之内,这会增加资源管理算法中任务执行时间窗设计的复杂性;
(2)天线的旋转会带来雷达资源可达性的问题,即雷达波束照射的角度受到限制,波束捷变的灵活性下降。
而在机相扫雷达上扩展频段资源,采用双频段协同探测后,分时工作、目标交接等问题进一步增加了资源管理算法的设计难度。因此,如何最大限度的发挥相控阵体制的优势,成为双频段机相扫雷达资源管理算法亟待攻克的难题。
关于双频段机相扫雷达的资源管理算法,目前国内外鲜有研究报道,文献[10-15]的研究重点集中在任务调度算法,而雷达资源管理的核心是时间资源,国内外的文献资料中均未给出具体的时间资源管理算法。本文以某背靠背双频段机相扫雷达为例,提出了一种时间资源管理算法,解决了搜索、截获和跟踪等主要工作方式下的雷达资源优化调度问题,并通过仿真验证了算法的有效性。
1 双频段机相扫雷达的工作原理
考虑如图1(a)所示的双频段机相扫阵面构形,高、低两个频段的雷达天线阵面背靠背安装,分时工作,低频段阵面负责警戒搜索,高频段阵面负责重点目标的跟踪。虚线表示的扇形为两个阵面的相扫范围,通常低频段的相扫范围要小于高频段。图中黑色箭头代表低频段阵面法线方向,红色箭头代表搜索波束指向。
当没有跟踪目标时,搜索波束指向与阵面法线重合,从而获得最大的探测威力。而当搜索过程中插入对目标的跟踪波束后,由于两个阵面分时工作,在高频段阵面发射跟踪波束期间,低频段阵面也继续旋转了一个角度,因而搜索波束的指向与低频段阵面法线就不再重合,如图1(b)所示。

图1 阵面构形与工作原理图
对空监视雷达最主要的工作方式是搜索加跟踪(TAS),由于双频段雷达天线波束宽度的显著差异,在目标由低频段搜索进入高频段跟踪之前,还需要经过一个交接过程——截获方式,几种工作方式之间的转换关系如图2所示。下文中将分别针对图2中的三种工作方式展开时间资源管理算法的描述。

图2 工作方式转换图
2 时间资源管理算法
2.1 搜索方式的波束追赶算法
考虑图1(b)所示的在搜索过程中插入跟踪波束的情况,随着跟踪波束时间的累加,低频段天线阵面电轴滞后机械轴的角度逐渐变大,为尽可能将搜索波束控制在阵面法线附近,以获得最大探测威力,当滞后角度超出容限时,就需要加快扫描速度,使电轴追赶上机械轴。波束追赶算法的原理如下:
假设搜索帧在平台系下的方位角θSrh保持固定的波束跃度θd,而在天线系下的方位角φSrh则由于电扫指向与机扫指向的不同而动态变化,当电扫速度比机扫速度快时φSrh为正值,当电扫速度比机扫速度慢时φSrh为负值。为保证雷达威力与法线方向近似相同,因此设法把搜索波束天线系角度φSrh控制在[-φSrhMax,φSrhMax]区间内,在实际工程应用中可将边界值φSrhMax取为10°~15°。当φSrh<-φSrhMax时,说明电扫速度过慢,需要减少帧驻留时间,反之当φSrh>φSrhMax时,说明电扫速度过快,需要增加帧驻留时间。为此,除缺省驻留时间TSrh0外,增设两档驻留时间TSrhMin和TSrhMax,分别对应10 s和12 s搜索数据率。波束追赶算法的实现流程图如图3所示。
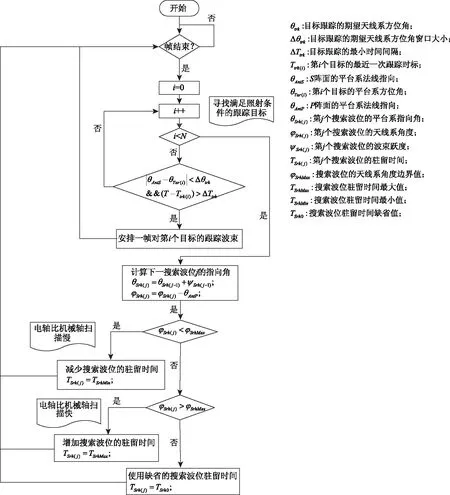
图3 波束追赶算法实现流程图
2.2 截获方式的驻留时间优化算法
在双频段雷达的设计中,目标跟踪由低频段搜索转为高频段跟踪的交接过程是其中的一项关键技术,如何在保证目标交接成功概率的前提下,通过优化波位排布和时间资源管理算法,降低系统的时间开销是截获方式资源管理的关键。
为保证目标的成功交接,通常需要保证90%的截获概率,假设目标RCS起伏满足Swerling I模型[16],为满足较高的目标发现概率,有以下两种方法:
① 提高单次截获的信噪比;
② 选择合适的单次截获信噪比,通过多次累计检测,高频段雷达系统主要参数见表1。

表1 高频段雷达系统主要参数
表中:Pav为发射机平均功率,GtGr为天线收发增益,λ为波长,σ为目标RCS,K为玻尔兹曼常数,T0为标准温度,Nc为噪声系数,Ls为系统损耗,R为目标距离。当选取表1中的参数时,信噪比与单帧检测概率以及单帧驻留时间的关系如图3所示, 按照单帧检测概率Pd1=0.9计算,如采用方法①,单帧的检测信噪比需要达到21 dB,驻留时间为101.6 ms。
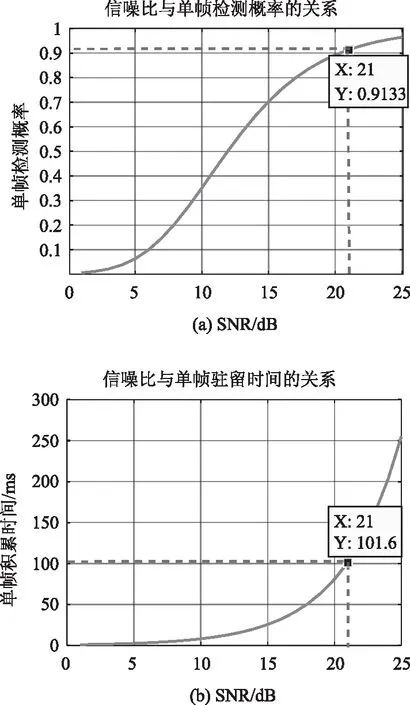
图3 计算方法①的驻留时间
假设方法②的单帧检测概率Pd2,n帧累计检测概率Pdc=1-(1-Pd2)n,n帧累计的驻留时间为
(1)
同样以0.9的累计检测概率为例,可得到不同单帧检测概率下的累计帧数,如图4(a)所示。
单帧驻留时间Td2由雷达方程计算,将雷达方程带入式(1)可得到:
(2)

图4 计算方法②的累计驻留时间
根据式(2)可得到目标信噪比与累计驻留时间直接的关系,如图4(b)所示。从图中可以看出,采用13 dB的单帧信噪比,所需的累计驻留时间最小(48.3 ms),远小于方法①的101.6 ms。因此,选择方法②来实现截获波位的时间资源管理能够达到最优的时间效能。
下面采用方法②对目标截获过程进行仿真,雷达低频段方位波束宽度5.1°,俯仰波束宽度10.2°,高频段方位波束宽度0.6°,俯仰波束宽度1.3°。假设在低频段搜索阶段,跟踪滤波器得到目标位置的预测精度为[σR,σA,σE]=[40 m, 0.35°, 0.72°],则截获屏的方位覆盖范围为0.35×6=2.1°,通常战斗机最大飞行高度20000 m,载机高度8000 m,则目标在400 km处截获屏的俯仰覆盖范围为3.4°,一个截获屏共计4×3=12个波位,如图5所示,黑色实心圆圈为目标的预测中心位置。
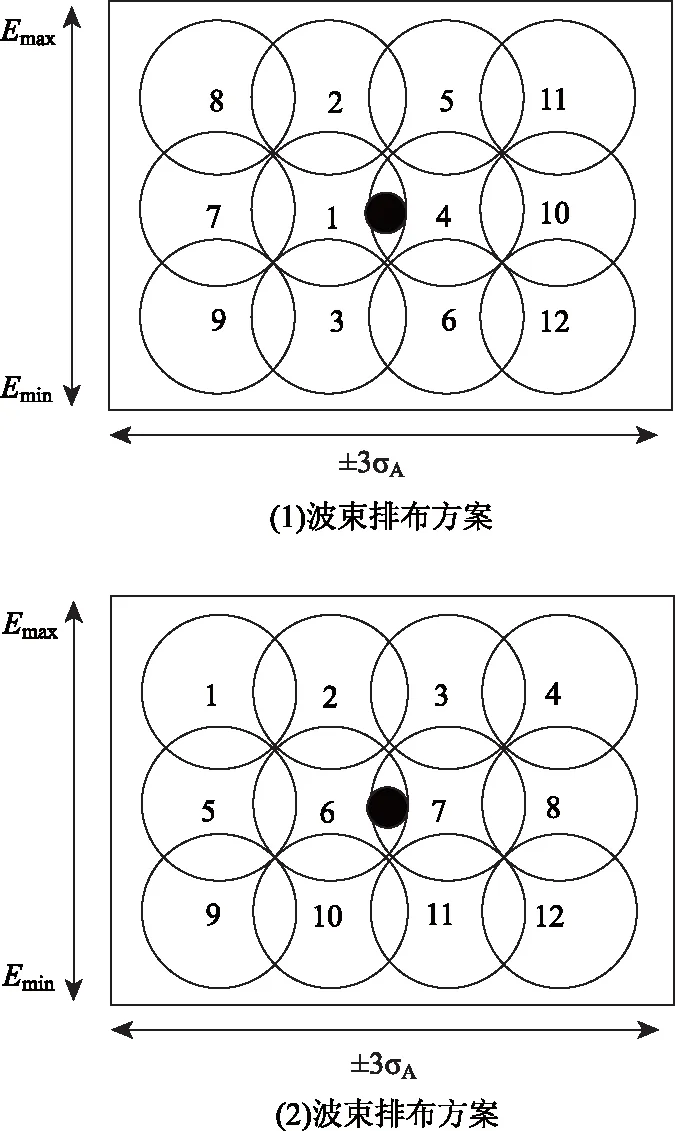
图5 截获波束的空间排布
图5描述了两种波束排布方案,分别是按照目标落入概率高低排布的方案(1),和按照空间位置顺序排布的方案(2)。各自经过10000次蒙特卡洛试验,得到截获概率与照射帧数的关系如图6所示。可以看出,在满足90%截获概率的条件下,方案(1)的照射帧数为40,而方案(2)需要51帧,前者的时间开销降低了22%。
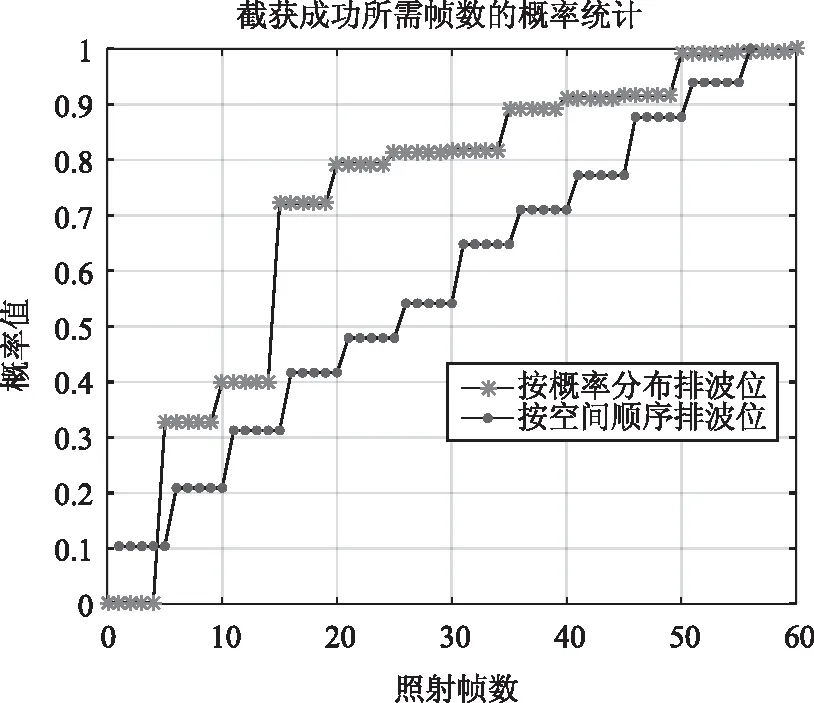
图6 截获概率与照射帧数关系
2.3 跟踪方式的自适应时间管理算法
从资源管理的角度看,在系统资源一定的情况下,雷达跟踪目标的数量与跟踪精度是一对矛盾,目前的研究文献多围绕精度问题展开。对于涉及跟踪精度指标的雷达资源管理问题,通常可以采取基于协方差控制的策略来分配相控阵雷达系统资源,其基本思想是对每个目标预先设定一个期望的跟踪精度,即期望协方差阵,然后控制传感器在某种度量及准则下使得实际协方差在某种意义上逼近期望协方差即可,剩余的系统资源可以用来维持其它目标的跟踪或是搜索发现新的目标[17]。
在多目标跟踪条件下,相控阵雷达首先追求的是完成所要求的任务,而不是单方面地追求跟踪精度。因此,本文从目标跟踪数量最大化的角度,提出一种基于期望信噪比的时间资源管理算法。基本思想是对目标信噪比进行平滑滤波,并通过调节跟踪能量,将目标信噪比控制在期望值附近。对于机相扫雷达,其特殊之处在于相邻时刻跟踪波束的天线系方位角变化较大,因此需要将天线系角度带入计算。

Step1:对k时刻的目标信噪比进行滤波;
(3)
当k时刻目标跟踪漏检时,令Snrk=D0-δ1。

(4)
Step3: 计算k+1时刻的跟踪驻留时间;
(5)
在实际工程应用中,为避免出现由于目标跟踪丢失期间连续漏检,从而导致能量增量ΔE累计过大造成的时间资源浪费问题,因此需要对ΔE的累加值设置上限进行保护。
按照表1中的雷达参数,取期望信噪比Snrexp为12 dB, 目标RCS起伏标准差1 dB,检测概率0.7,D0=10 dB,δ1=δ2=2 dB,α=0.2,跟踪数据率1 s,对应的天线系角度序列为[-60° -30° 0° 30° 60°]循环,目标由500 km开始跟踪,与载机之间的相对速度500 m/s,仿真360 s,得到以下结果,如图8、图9所示。
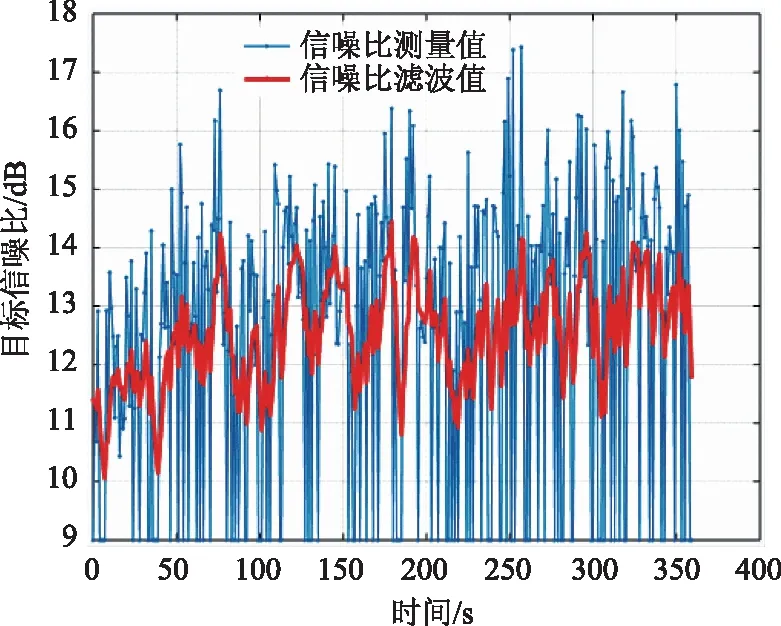
图7 目标信噪比

图8 跟踪波束的驻留时间

图9 跟踪时间资源对比
从图7可以看出,目标信噪比被控制在期望值12 dB附近;图8则反映了随着目标距离的接近,跟踪驻留时间呈递减趋势,由于检测概率和RCS起伏的因素导致实际驻留时间比理论值略高;从图9可以看出,采用自适应能量管理后,总的跟踪时间下降了40%。
3 仿真实验与结果分析
采用图1所示的雷达阵面构形,高、低两个频段的雷达系统参数分别如表1和表2所示。天线转速12 s/圈,高频段相扫范围±60°,低频段相扫范围±40°,两个频段分时工作,独占全部的雷达功率。波束追赶算法的搜索波束天线系角度期望控制区间为[-10°,10°],雷达工作在TAS方式,同时跟踪24批目标,目标跟踪时间管理的期望信噪比为12 dB,跟踪数据率2 s。按照跟踪目标不同的角度分布态势,分两种典型作战场景,各做1000次蒙特卡洛仿真,单次仿真时间36 s(3个扫描周期)。

表2 低频段雷达系统参数
仿真场景一:假定跟踪目标全空域覆盖,24批目标在360°范围内随机分布,单次仿真结果如图10所示。多次仿真结果统计,电轴最大领先角0.6° 最大落后角-11.5°,最大落后角度的均值为-11.2°。
仿真场景二:搜索波束仍然全空域覆盖,但跟踪目标集中在某重点关注来袭方向,24批目标在60°扇区内随机分布,单次仿真结果如图11所示。多次仿真结果统计,电轴最大领先角度10.1°,最大落后角度-17.3°最大落后角度均值-15.7°。
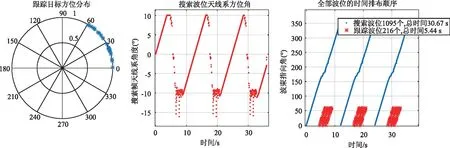
图11 跟踪目标密集分布场景仿真结果
从图11中可以看出,当连续的目标跟踪过程开启后,搜索波束的电轴开始迅速落后机械轴,而在跟踪过程结束后又开始迅速追赶上并超过机械轴。通过两种仿真场景的结果对比来看,当跟踪目标较为分散时,搜索波束的电轴落后阵面机械轴的角度可控制在-10°以内,搜索威力损失可忽略不计;而当目标分布非常集中时,搜索波束的电轴落后角度在某些时刻会超出期望控制值,造成部分区域的搜索威力有所下降。
4 结 语
为应对复杂作战环境下的多任务、一体化需求,双频段机相扫体制成为当前对空监视雷达的重要发展方向,而阵面的机械旋转和双频段协同特性也导致了雷达资源管理算法的复杂性,雷达资源管理的核心是时间资源,目前国内外鲜有关于双频段机相扫雷达时间资源管理算法的文献。本文以背靠背双频段机相扫雷达为例,研究了搜索、截获和跟踪方式的时间资源管理算法,给出了算法原理和实现流程。仿真实验结果表明,在非极端场景下,该算法能够满足大批量目标跟踪需求,因此具有很高的实用价值,目前已经应用在某型雷达工程样机的研制中。下一步将继续优化该算法,充分挖掘机相扫雷达资源调度潜力,增强波束调度灵活性,更好满足同时多功能的任务适应性要求。
猜你喜欢
舰船电子对抗(2022年5期)2022-11-25
电子机械工程(2022年2期)2022-04-25
现代仪器与医疗(2022年1期)2022-04-19
舰船电子对抗(2021年1期)2021-04-15
成都信息工程大学学报(2021年6期)2021-02-12
舰船科学技术(2020年3期)2020-04-22
舰船电子对抗(2019年5期)2019-12-04
北京航空航天大学学报(2019年9期)2019-10-26
通信技术(2019年3期)2019-05-31
雷达学报(2017年3期)2018-01-19
