惯导滤波参数优化算法
2019-06-05 06:20:58高伟伟朱文杰
传感器与微系统 2019年6期
高伟伟, 朱文杰, 方 丹, 王 毅, 田 杰
(陆军工程大学石家庄校区 四系,河北 石家庄 050003)
0 引 言
为了抑制惯导解算参数受积累性误差的影响,往往采用组合的方法提高导航系统性能,如卫星与惯导组合、星光与惯导的组合等[1]。组合系统的核心是误差的估计与修正,一般采用基于Kalman 滤波的误差估计方法,相关参数的误差估计过程是否收敛,估计速度如何,估计精度怎样均会影响组合系统的性能[2~5]。在误差估计过程中,滤波参数的设置是影响误差估计速度和精度的关键因素,因此,本文对捷联惯导组合滤波参数优化方法进行了研究。
1 Kalman滤波修正方法
由于惯性系统随时间增长会产生误差积累,在实际工程应用中,需要监测捷联姿态测量系统各误差状态量的变化,根据状态数值变化大小对系统进行干预和修正。各误差状态量中,有些状态可通过仪器测量直接得到,但测量得到的数值中通常有测量噪声,且一般不能满足所有状态均可通过仪器测量,这就需要通过最优估计方法实现。最优估计方法通过建立状态方程和量测方程,对部分可测量状态数据进行数学处理,得到某种估计准则下误差最小的更多状态估值,常用的最优估计方法有Kalman滤波估计,它是一种递推线性最小方差估计[6~9]。
以Kalman 滤波闭环校正为例,对误差状态量的修正过程如图1所示。根据各误差参数对输出结果的影响程度,选取适当的误差参数作为状态量,并建立误差状态方程,结合外部参考信息和捷联数学解算信息建立量测方程
(1)
通过观测量采用Kalman估计出主要误差状态参数值,并对捷联数学解算过程进行误差修正[10,11],因此,误差修正的关键是如何实现相关参数误差的准确估计。在Kalman 滤波估计过程中,滤波参数初值P0,Q0,R0的设定将影响误差状态量的估计速度、精度以及系统的稳定性[10,11]。由于实际应用中无法准确获得过程噪声Wk和量测噪声Vk的统计特性,大多情况下通过实际系统的先验值或实测数据得到P0,Q0,R0的大概取值范围[12]。如何合理设置滤波参数初值,以最大程度上改善并发挥Kalman滤波估计性能,是提高系统精度的关键环节[13]。

图1 基于Kalman滤波的误差状态修正过程
2 初始滤波参数的优化
为分析滤波参数初值对滤波性能的影响,以陆基条件下的姿态误差估计为例,选取速度误差、姿态误差、位置误差、加速度计零偏、陀螺零偏为状态量,且设状态量
X=[δVEδVNφEφNφUδLδλρEρNεE
εNεU]
设初始条件下,三轴陀螺的常值零偏均为0.1°/h,随机噪声0.05°/h,三轴加速度计的常值零偏为100 gn,随机噪声为50 gn,速度误差均为0.1 m/s,位置误差均为100 m,初始俯仰角误差为5′,横滚角误差为15′,方位角误差为15′;以东向和北向速度误差为观测量,设定量测误差均为标准差为0.01 m/s的零均值高斯噪声。载体初始条件下处于静止状态,10 s后以0.5 m/s2的加速度向北行驶,20 s后停止加速并匀速运动至第120 s结束,滤波周期为0.1 s。根据以上仿真条件,通常情况下Kalman 滤波初始参数设定如下:
P0=diag[(0.1 m/s)2,(0.1 m/s)2,(5′)2,(5′)2,(15′)2,(100 m)2,(100 m)2,(100gn)2,(100gn)2,(0.1°/h)2,(0.1°/h)2,(0.1°/h)2]
Q0=diag[(50 gn)2,(50 gn)2,(0.05°/h),(0.05°/h),(0.05°/h),0,0,0,0,0,0,0]
R0=diag[(0.01 m/s)2,(0.01 m/s)2]
在以上条件下,得到的姿态误差估计曲线如图2所示。整理Kalman滤波估计结果得到,上述初始滤波参数条件下,俯仰角和横滚角误差在静态条件下即可估计,且120 s内估计精度在0.5′以内,方位角误差在北向加速激励后可估计,120 s内的估计精度在1′左右。由于在捷联姿态解算过程中,方位角精度受总体误差源的影响较大,因此,本文以方位角的误差估计为例,在设置不同的初始参数值条件下,通过仿真分析揭示不同滤波参数对姿态误差估计的影响。
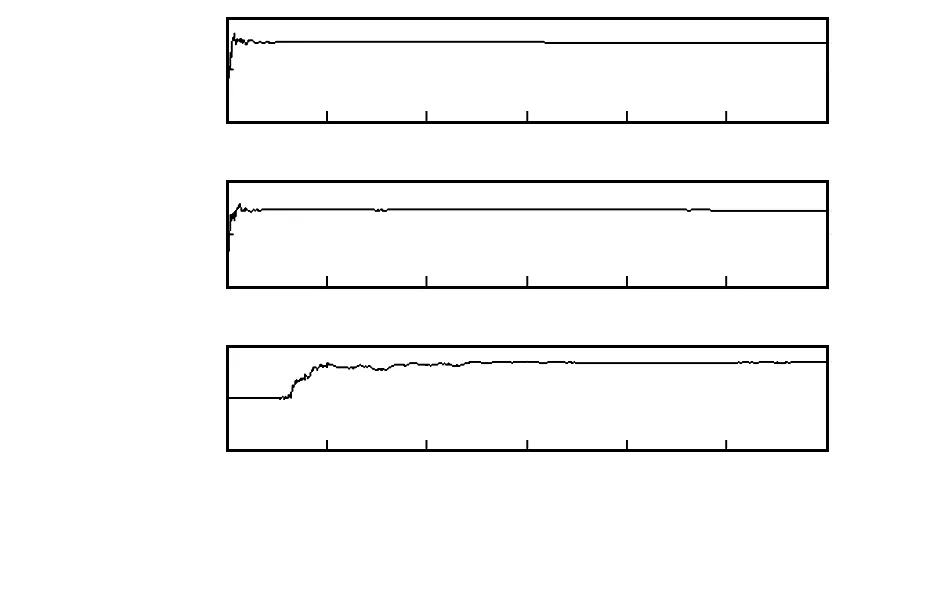
图2 姿态误差估计结果
1)不同P/Q/R值对误差状态估计的影响
在保持其它条件不变得情况下,设定P初值分别为P0,0.1P0,0.5P0,5P0,20P0,得到方位角误差估计结果如图3所示。分析仿真结果可得,较大的P值可提高方位角误差估计速度,但收敛过程具有较大震荡;较小的P值时,方位角误差估计速度较慢,但收敛过程较稳定,具有较好的抗干扰能力。
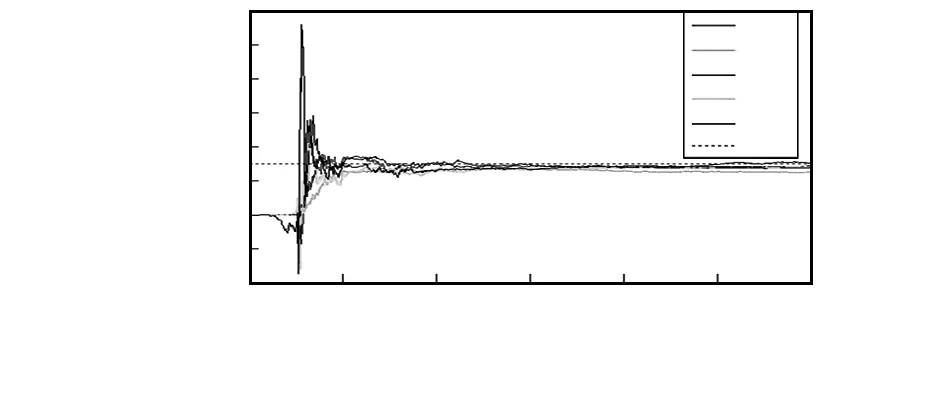
图3 不同P值下的方位角误差估计
在保持其它条件不变得情况下,设定Q初值分别为Q0,0.01Q0,0.1Q0,5Q0,20Q0,得到方位角误差估计结果如图4所示。
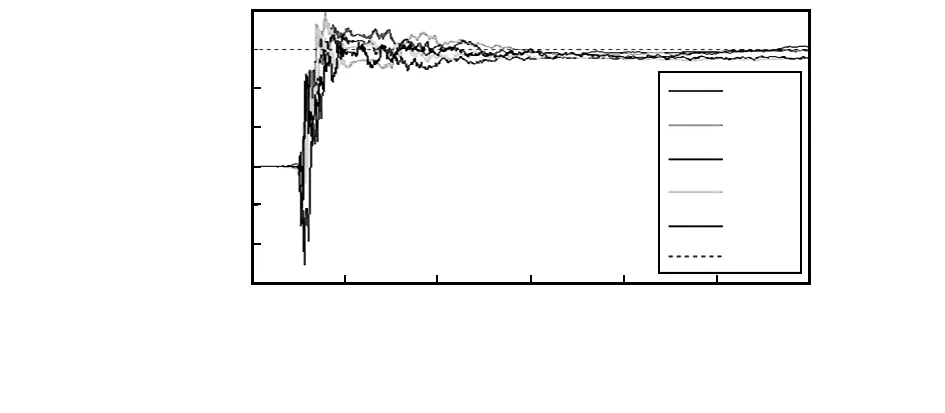
图4 不同Q值下的方位角误差估计
分析结果可知较大的Q值将影响方位角误差的估计精度,引起较大的估计误差;较小的Q值有利于提高估计精度。
同理,设定R初值分别为R0,0.01R0,0.1R0,5R0,20R0,得到方位角误差估计结果如图5所示。从图中可看出,较小的R值将引起较大的震荡,不利于系统的稳定性;过大的R值将引起较大的估计误差;适当增大R值有利于提高系统的稳定性和估计精度。
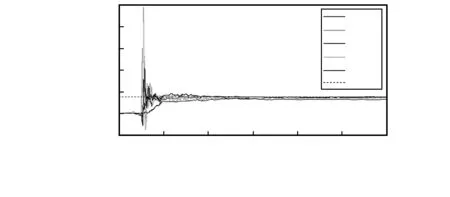
图5 不同R值下的方位角误差估计
2)滤波参数值的优化
综合上一节的分析结果,在实际应用中,为提高滤波估计精度以及系统的稳定性,可设置较小的P值、Q值及较大的R值。设优化后的滤波参数P=0.5P0,Q=0.5Q0,R=2R0,非优化滤波参数P=5P0,Q=5Q0,R=0.1R0,标准滤波参数P=P0,Q=Q0,R=R0;在上述参数设置条件下,得到方位角的误差估计结果如图6所示。从图中可看出,参数优化后方位角误差估计过程更加平稳,且在120内可达到较高的估计精度,相比标准滤波参数输出精度提高了0.5′。
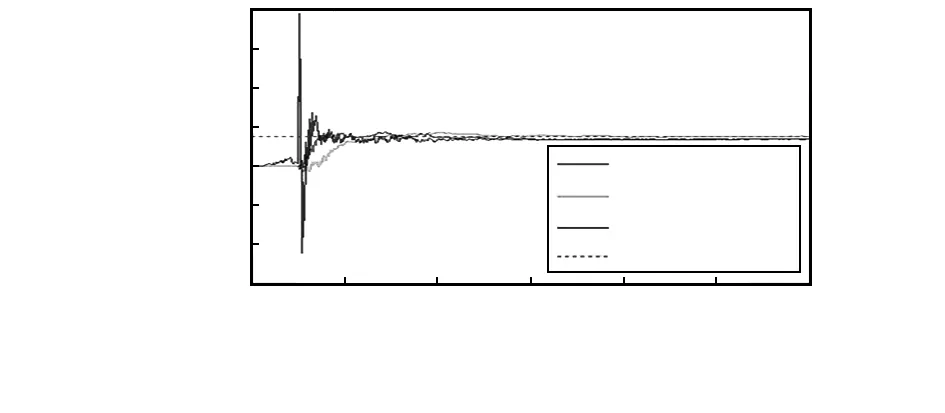
图6 滤波参数优化前后的方位角误差估计
3 结 论
惯导误差修正效果如何涉及多方面的因素,其中滤波参数的设置是重要因素之一。惯导滤波参数优化方法研究为初始滤波参数的设置提供了参考依据,有助于通过初始滤波参数的设置提高滤波估计性能,进而提高惯导误差修正效果。结合工程实验效果和仿真变化规律,可为实际应用中初始滤波参数的设置提供经验依据。
猜你喜欢
数学物理学报(2022年1期)2022-03-16 06:15:04
卷宗(2021年2期)2021-03-09 07:57:24
空间科学学报(2020年1期)2021-01-14 00:53:28
空间科学学报(2020年4期)2020-04-22 01:17:04
数学年刊A辑(中文版)(2018年2期)2019-01-08 01:59:46
测控技术(2018年2期)2018-12-09 09:00:56
北京航空航天大学学报(2018年1期)2018-04-20 06:38:19
中国惯性技术学报(2017年1期)2017-06-09 08:15:14
河南科技(2015年18期)2015-11-25 08:50:14
计算机工程(2015年4期)2015-07-05 08:28:57