
张力腿平台涡激运动特性的试验研究
2019-06-04 00:50:04黄维平张兆德谢永和
船舶力学 2019年5期
李 磊,黄维平,常 爽,张兆德,谢永和
(1.中国海洋大学 山东省海洋工程重点实验室,山东 青岛266100;2.浙江海洋大学 船舶与机电工程学院,浙江 舟山316022)
0 引言
近年来,浮式平台的涡激振动问题主要针对Spar 平台的大幅、低频运动进行研究,并提出了一些有效的抑制方法[1-2]。随着研究的深入,发现半潜平台和张力腿平台也有可能发生大幅的涡激振动现象[3-5],此类刚性浮式平台的大幅涡激振动亦称为涡激运动。研究发现[6-7],低质量比情况下,锁定区范围比高质量比情况下锁定区范围更大,因此传统张力腿平台(m*<1)与Spar 平台和半潜平台(m*≈1)的涡激运动特性亦不相同。
Waals 等(2007)[8]对4 浮箱深吃水半潜平台、4 浮箱深吃水TLP 平台、4 浮箱典型半潜平台和2 浮箱半潜平台进行了涡激运动试验研究,主要研究质量比、浮箱、流速、流向及激励长度对涡激运动的影响。研究发现传统TLP 等低质量比浮式结构在海流作用下更容易产生大幅值的横向涡激运动现象。
Kim 和Magee(2011)[9]对Shell 和Technip 共同投资的张力腿平台进行了试验研究,并利用CFD 方法进行了验证。模型试验在马来西亚工业大学海洋工程拖曳水池中进行。水平方向采用软弹簧模拟TLP 水平方向刚度,垂向利用气浮轴承实现模型吃水,并采用中国南海的特征流速进行了拖曳水池试验。重点考察了流速、流向、无因次吃水比对涡激运动的影响,给出了六自由度涡激运动响应的时程曲线、纵荡及横荡轨迹。研究表明CFD 方法计算结果很好地吻合了试验结果,尤其在较低约化速度下结果基本相同。
Abrishamchi 和Younis(2012)[10]用数值方法模拟了雷诺数为7.5×106~7.5×107范围内张力腿平台在恒定流作用下的非定常水动力载荷。计算中采用VOF 法模拟自由液面,分别利用大涡模型和非定常雷诺时均模型模拟湍流度的影响。主要目标是探讨不同湍流模型模拟大尺寸结构涡激运动问题的优缺点。研究认为,立柱受力受自由面运动的影响较大,在现行工程设计中应用的刚盖假设理论会产生较大的误差预测,同时得到TLP 各立柱结构的受力易受流向角影响。
Tan 和Magee(2014)[11]针对张力腿平台低纵横比和低质量比特点,进行了模型试验和数值仿真研究。试验通过在低摩擦气浮轴承下安装反向压缩弹簧系统,实现TLP 真实的质量比。该装置可以使平台在水平方向自由移动,并通过压缩弹簧模拟张力筋键的刚度,达到匹配TLP 垂荡、横摇和纵摇周期的模拟。研究发现,TLP 立柱附属结构可以减小平台的涡激运动现象,研究中应重点考虑其影响。
本文利用水槽试验方法,通过施加等效系泊方式,研究了传统张力腿平台涡激运动响应、锁定区范围和运动轨迹等特点,重点探讨了不同来流角度下TLP 涡激运动的频谱特性。
1 模型试验
1.1 试验模型
模型试验通过施加等效系泊的方式在中国海洋大学波流水槽中进行。水槽主体有效尺寸为长40 m,外宽76 cm,内宽59 cm,高95 cm。试验仪器主要有流速仪、加速度传感器、压力传感器、电荷放大器和数据采集仪等。试验数据采用DASP 多功能数据采集分析系统对加速度和压力信号进行处理分析。
试验模型参考传统张力腿平台设计,模型材料采用有机玻璃,具有强度高、质量轻、易于加工的优点。为满足水槽试验要求,减小壁面因素影响,尺寸按照水槽大小制作,模型距离壁面两侧15 cm 以上,试验装置如图1所示,主要参数如表1所示。

图1 模型试验装置Fig.1 Picture of TLP model

表1 张力腿平台模型参数Tab.1 Main parameters of tension leg platform
坐标系如图2所示,O-XYZ 为大地坐标系,oxyz 为平台坐标系,原点位于左下侧圆柱中心,来流方向沿大地坐标系OX 轴,来流角度定义为来流方向与平台ox 轴所成的角度(即平台坐标ox 轴与大地坐标OX 轴所成的夹角)。
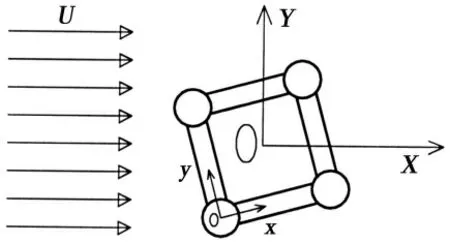
图2 坐标系定义Fig.2 Definition of coordinate systems
1.2 系泊方案
考虑到实际的系泊状态,模型试验中设计了一套考虑水平和垂向系泊刚度的锚泊方案,垂向系泊系统模拟张力筋键作用以达到张力腿平台低质量比特性,而水平系泊方案使平台横荡和纵荡固有周期达到设计值为准,系泊方案如图3-4所示[12]。模型试验中,使用软弹簧模拟系泊系统,系泊刚度为6 N/m。
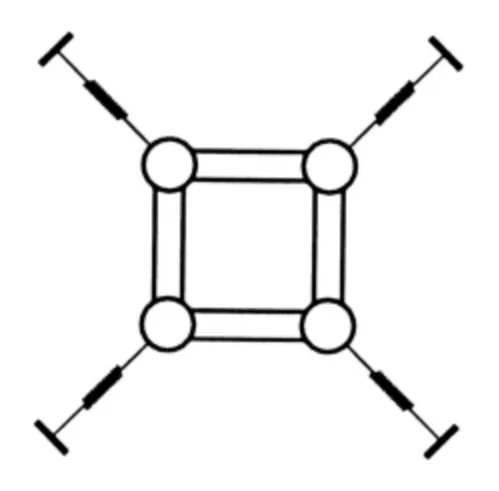
图3 水平系泊系统Fig.3 Layout of horizontal mooring

图4 垂向系泊系统Fig.4 Layout of vertical mooring
考虑到折合速度在涡激运动问题中的重要性,在试验中折合速度要尽可能包含非锁定区、锁定区和超锁定区等范围。根据水槽的造流范围(0~0.4 m/s)和试验的折合速度(约为Ur=0~12),通过调控横荡固有周期来实现[13]。
试验中流速采用折合速度表示,定义如下:
Ur=(VT0)/D
式中:V 为流速,T0为平台在静水中的横荡固有周期,D 为立柱直径。
试验中,当流速达到指定流速时,流速计相关性达到50%以上开始采样,采样频率100 Hz,采集时间为200 s。由于该模型结构的对称性,试验中选取0°、15°、30°和45°四个来流方向。
2 试验结果与分析
图5给出了不同流向角下张力腿平台横向无量纲涡激运动响应幅值(振幅与管径之比)随折合速度的变化曲线。由图可知,流向角对平台的涡激运动响应影响较小,但都捕捉到了锁定现象。当折合速度Ur<4.0 时尚未进入锁定区,响应幅值较小;当折合速度4.0≤Ur≤7.0 时到达锁定范围,响应幅值大幅增加,且锁定区响应幅值基本不变,振幅约为0.6D,此时平台发生强烈的涡激运动;当折合速度到达8.0≤Ur≤12.0 时,响应幅值开始减小,说明此时平台的涡激运动逐渐减弱;当折合速度Ur>12.0 时,运动响应变化无序。
分析表明,随折合速度的增大,涡激运动呈现上下“两支”现象,从3.0≤Ur≤7.0 的过程中,振幅逐渐增大,由非锁定区进入锁定范围,锁定区范围较大且响应幅值相同;在Ur=7.0 左右出现突变,频率解锁,振幅逐渐减小。上述结果表明,在折合速度下4.0≤Ur≤7.0 时平台横流向发生了频率锁定现象,与涡激振动相似,此时平台的涡激运动幅值较大,容易造成系泊和立管设备的疲劳破坏。
图6所示为顺流向无量纲涡激运动响应幅值,由图可知,顺流向涡激运动响应特性与横向基本相同,但顺流向响应幅值远小于横向。当折合速度Ur<4.0 时尚未进入锁定区,振幅较小;折合速度4.0≤Ur≤7.0 时达到锁定区,振幅基本保持在0.2D;当Ur>7.0 时,顺流向又会出现先减小后增大的非周期性运动响应。
上述结果表明,平台在顺流向亦会发生频率锁定,且顺流向响应幅值要小于横流向,但在锁定区不宜忽略其运动响应。因此,平台涡激运动问题应同时考虑横向和顺流向的运动响应。
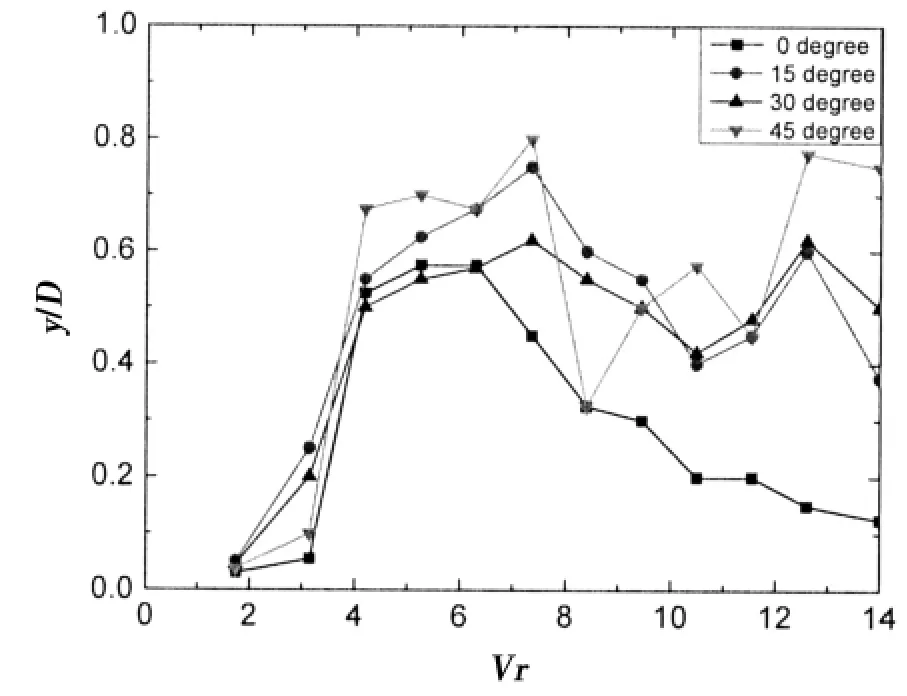
图5 不同流向角下横向无量纲运动幅值曲线Fig.5 Nondimensional amplitudes of the motions in the transverse direction for different current incidence

图6 不同流向角下顺流向无量纲运动幅值曲线Fig.6 Nondimensional amplitudes of the motions in the in-line direction for different current incidence
图7所示为锁定区(折合速度Ur=6.3)时,张力腿平台涡激力响应谱和无量纲涡激运动响应谱。由图7(a)可知,平台结构升、阻力频率分别为0.5 Hz 和1.01 Hz,阻力频率约为升力频率的2 倍。此时斯特哈尔频率为0.76 Hz,升力频率不再满足斯特哈尔关系。
比较图7(a)-(b)可知,流体对平台的涡激力主要集中在两个频率带,即顺流向振荡频率和横流向振荡频率,而且顺流向振荡频率与阻力频率相同,横向振荡频率与升力频率相同。
结果表明,涡激力频率与涡激运动响应频率相同,即在平台的流固耦合问题中,横向振荡频率就是涡激升力频率,亦是涡泄频率[14]。

图7 涡激运动功率谱曲线Fig.7 Response spectrum of VIM
图8所示为锁定区0°、15°、30°和45°流向时,TLP 横向和顺流向涡激运动时程曲线。由图可知,在锁定区,横向和顺流向均有较大的运动幅值,但横向运动居主导地位。在锁定区范围内,不同流向的运动幅值基本不变,横向运动响应幅值约为0.5~1.0D,顺流向响应幅值约为0.1~0.2D。因此,应同时考虑横向和顺流向的涡激运动问题。

图8 模型涡激运动时程曲线Fig.8 Time history of transverse and inline VIM

图9 模型涡激运动功率谱曲线Fig.9 Spectrum of transverse and inline VIM
图9所示为锁定区0°、15°、30°和45°流向时,TLP 横向和顺流向功率谱曲线。由图可知,0°时顺流向和横向的峰值频率分别为1.1 Hz 和0.55 Hz,15°时顺流向和横向的峰值频率均为0.55 Hz,30°时顺流向和横向的峰值频率均为0.75 Hz,45°时顺流向和横向的峰值频率分别为1.1 Hz 和0.55 Hz。因此,0°和45°流向时,顺流向振荡频率是横向振荡频率的两倍;而15°和30°流向时,顺流向振荡频率与横向振荡频率相同。
结果表明,涡激振荡频率与结构在来流中的位置相关。当结构沿流向对称时,顺流向振荡频率是横向振荡频率的两倍;当结构沿流向不对称时,顺流向振荡频率与横向振荡频率相同。
图10 分别给出了在0°、15°、30°和45°流向时,TLP 在锁定范围内的涡激运动轨迹图。由图可知,在锁定区,平台运动幅值较大且运动轨迹较规则,说明此时发生了强烈的涡激共振现象;而且横向和顺流向幅值之比约为2~6,因此在锁定区TLP 平台的横向运动居主导地位。
在锁定区,当0°和45°流入射时,结构的运动轨迹为扁“8”字形;15°和30°时,运动轨迹呈“香蕉形”。分析可知,0°和45°流入射时平台立柱结构沿流向呈对称形式,此时顺流向响应频率为横向的两倍,运动轨迹亦成“8”字形对称;15°和30°时,横向和顺流向响应频率相等,运动轨迹呈非对称结构。
结果表明,在锁定区发生了剧烈的涡激共振现象,而且流向角是影响平台涡激运动轨迹的关键因素。此时,横向运动幅值远大于顺流向,而且在横向和顺流向的耦合作用下,平台的涡激运动轨迹具有较规则的形态,说明涡激运动具有一定的自限性。
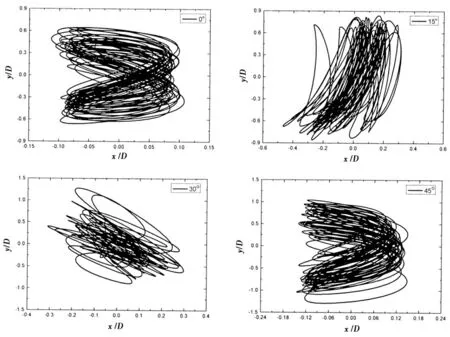
图10 张力腿平台涡激运动轨迹图Fig.10 The motion trace under different current incidence
3 结论
本文对张力腿平台的流致涡激运动问题进行了试验研究,研究发现了TLP 的涡激运动特性,得到以下结论:
(1)观测到了“锁定区”和“两支”等现象。研究发现,横向和顺流向均发生了频锁现象,横向和顺流向达到锁定范围的折合速度为Ur=4.0~7.0,且横向运动居主导地位。
(2)横向振荡频率与脉动升力频率相等,顺流向振荡频率与脉动阻力频率相等,且横向涡激响应频率亦是涡泄频率。
(3)涡激振荡频率与平台在来流中的位置有关。当结构沿流向对称时,顺流向振荡频率是横向振荡频率的两倍;当结构沿流向不对称时,顺流向振荡频率与横向相同。
(4)流向角是影响TLP 涡激运动轨迹的关键因素。在锁定区,当流向角为0°和45°时,结构的运动轨迹呈不规则“8”字形;15°和30°时,运动轨迹呈“香蕉形”。
猜你喜欢
舰船科学技术(2022年22期)2022-12-13 03:38:00
舰船科学技术(2022年20期)2022-11-28 08:19:02
山东冶金(2022年2期)2022-08-08 01:50:50
装备制造技术(2020年1期)2020-12-25 05:19:44
中国水运(2020年6期)2020-11-17 09:41:54
人物(2019年9期)2019-02-13 03:00:50
电子制作(2018年14期)2018-08-21 01:38:42
中国经贸(2016年7期)2016-10-21 01:39:38
工业设计(2016年11期)2016-04-16 02:48:21
天津城建大学学报(2015年5期)2015-12-09 01:26:50
