
6.5倍微小型可见光变焦光学系统设计
2019-06-04 07:44张建隆
光学仪器 2019年2期
贺 磊,张建隆,杨 振
(1.哈尔滨新光光电科技有限公司,黑龙江 哈尔滨 150080;2.哈尔滨工业大学 光学目标仿真与测试技术研究所,黑龙江 哈尔滨 150080)
引 言
进入21世纪,光学成像系统已广泛应用于工业生产、地面防空、预警侦察和武器制导等诸多领域[1]。无人机光电吊舱在近年来得到了飞速发展,如以色列NEXTVISION公司生产的Colibri型无人机光电吊舱,其为可见/红外双波段无人机光电吊舱,在可见光波段采用了连续变焦的光学系统,整机外形直径小于53 mm、高度小于78 mm、重量小于160 g,具有体积小、重量轻、结构紧凑的特点。我国自主研发的“龙之眼”330型无人机光电吊舱也采用可见/红外双波段光学系统,其内部集成了一台高清可见光变焦光学系统,可对目标实施搜索、跟踪、定位。
由上述可知,变焦光学系统已广泛应用于无人机光电吊舱。随着光电载荷性能指标的不断提升,对变焦光学系统的高分辨率、小型化、轻量化设计需求也与日俱增,因此设计一款高分辨率、微小型的连续变焦系统非常重要。
变焦光学系统是指焦距可在一定范围内连续改变,而保持像面不动的光学系统[2]。文献[3]设计的一种高分辨率电视制导连续变焦光学系统的焦距为40~152 mm、F数为3.5、传递函数数值在106 lp/mm达到0.4,光学系统长度为160 mm;文献[4]设计的AOTF光谱相机前置变焦光学系统的焦距为30~300 mm、传递函数数值在50 lp/mm达到0.7;文献[5]设计的8倍可见光变焦光学系统的焦距为6.5~52 mm、F数为4、传递函数数值在75 lp/mm达到0.6。本文充分考虑了上述光学系统的优缺点,结合光学系统焦距、变倍比、F数、分辨率、小型化等因素,通过不断优化设计,设计出了一款小F数、高分辨率的连续变焦光学系统,实现了系统的小型化、轻量化设计。
1 设计原理
变焦光学系统是通过改变各个镜组之间的间隔以实现光学系统的焦距变化[6-7]。在光学系统变焦过程中,为保证像面位置不变以及成像质量优良,需采用补偿方法补偿变焦过程中所产生的光学像差和像面位移。补偿方法一般分为光学补偿和机械补偿两种形式:光学补偿即镜组同方向移动到特定位置,以实现系统焦距的改变,通常适用于两档或多档变焦光学系统,无法实现连续变焦;机械补偿即变焦光学系统的焦距能够连续改变,因此得到了迅速的发展和广泛的应用[8]。本文采用二组元机械补偿法实现光学系统的连续变焦,即系统由前固定组、变倍组、补偿组、后固定组4部分组成,变焦原理如图1所示。在变焦过程中光学系统需满足“物像交换原则”,即焦距在一定范围内连续改变时,其像面基本保持不动[5]。

图1 变焦原理图Fig.1 Principle of zooming
由图1可知,在变焦过程中,变倍组和补偿组做相对运动,通过变倍组移动改变系统焦距,补偿组移动补偿像面漂移和像质变化。在设计过程中需严格控制变倍组、补偿组焦距、放大倍率,避免变倍组和补偿组相撞。假定系统的变倍比为M,前固定组、变倍组、补偿组的焦距分别为、、,相对间隔为、,变倍组、补偿组的初始物距分别为l2、l3,则变倍组、补偿组的放大倍率、分别为:

当变倍组移动x时,补偿组的移动量为y。则在满足变倍比M的同时,变倍组与补偿组之间的间隔需满足

变焦计算示意图如图2所示[2]。
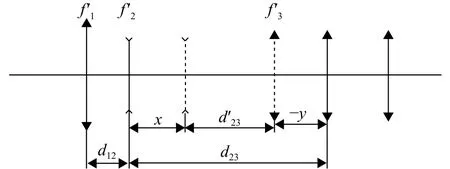
图2 变焦间隔计算示意图Fig.2 Calculation of the zoom interval
2 设计实例
通过查阅相关资料,参考国内外先进无人机光电吊舱相关技术指标,结合小型化、轻量化设计需求,运用Zemax光学设计软件对光学系统进行优化设计,技术指标如表1所示。

表1 光学系统技术指标要求Tab.1 Optical specifications
根据表1光学系统技术指标要求,选用PAL制式(720×576)CMOS传感器,其靶面尺寸为1.44 mm×1.15 mm,对角线1.84 mm。光学系统在各个焦距位置对应的视场为

式中:h为 CMOS靶面长边长度(1.44 mm);f为光学系统总焦距。选择4个变焦位置进行设计计算,每个变焦位置对应的视场[8]如表2所示。

表2 光学系统的焦距和视场值Tab.2 Focal lengths and FOV of the optical system
3 仿真设计结果
3.1 优化后的系统结构参数
选择4个焦距位置利用Zemax光学设计软件进行优化计算,系统由4组10片透镜组成,系统总长为26.85 mm,最大口径为φ8.0 mm,总质量为0.77 g,图3为光学系统结构图,显示了系统4个变焦位置时的光学透镜位置。表3为变倍组、补偿组移动时与前后固定组的距离,其中d1为变倍组与前固定组距离,d3为变倍组与补偿组之间的距离,d5为补偿组与后固定组的距离,和l分别为此时系统的焦距值和后截距值,表4为各镜片质量。
该变焦光学系统的变倍组、补偿组的凸轮曲线如图4、图5所示,图中横坐标代表变焦系统的焦距变化,纵坐标表示不同焦距下变倍组、补偿组的运动轨迹。由图中曲线可知,当变焦系统的焦距值由2.68 mm变化到17.5 mm时,变倍组的运动总行程为8.32 mm,补偿组的运动总行程为3.92 mm,两条运动曲线轨迹平滑无拐点,易于系统的加工装校。
3.2 像质评价
图6、图7为连续变焦光学系统在4个焦距位置的光学传递函数和畸变曲线图。在空间频率为250 lp/mm时,0视场MTF值分别为0.52、0.49、0.48、0.43,全视场弧矢MTF值分别为0.40、0.47、0.47、0.41,全视场子午MTF值分别为0.26、0.32、0.36、0.28,光学系统畸变值分别为4.31%,1.68%,2.45%,1.95%。由上述分析可知:系统的成像质量为优良,完全满足光学系统指标要求。
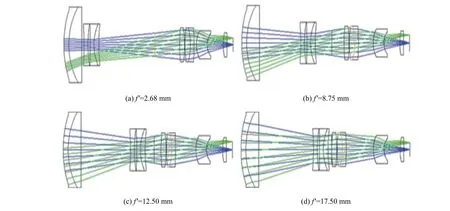
图3 光学系统结构图Fig.3 Schematic diagram of the zoom system

表3 焦距和间隔参数Tab.3 The focal length and the interval

表4 镜片质量Tab.4 The lens weight
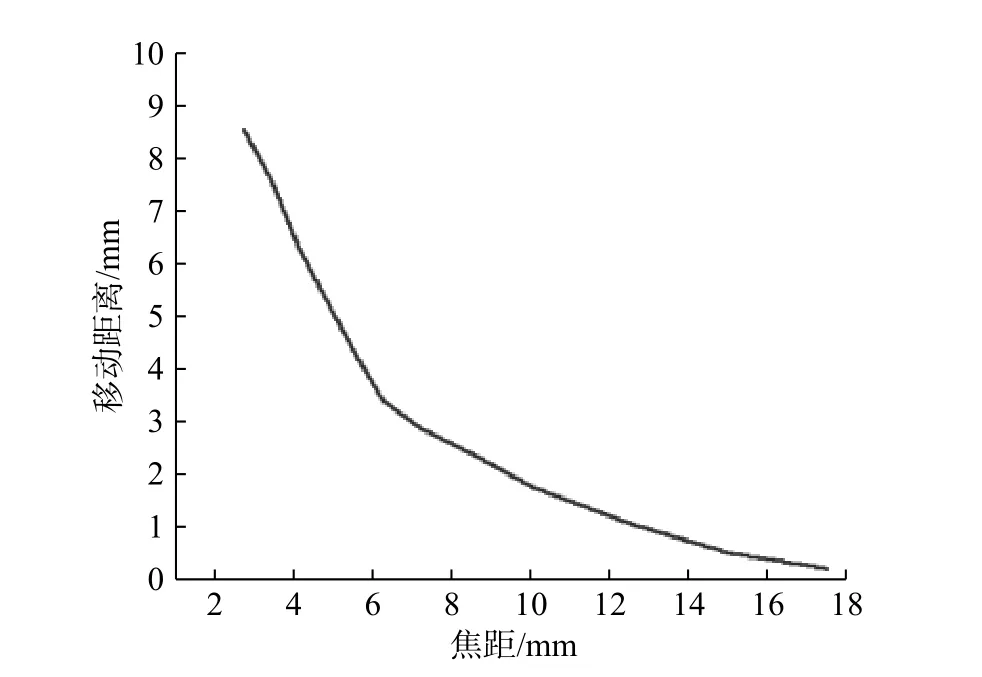
图4 变倍组曲线Fig.4 Zoom group

图5 补偿组曲线Fig.5 Curve of compensating group

图6 光学系统的传递函数Fig.6 MTF of the optical system

图7 光学系统的场曲、畸变图Fig.7 The field and distortion of the optical system
3.3 公差分析
光学系统公差包括零件加工允许误差和系统装调的允许误差[9]。光学设计者除了在设计时保证系统到达技术条件中规定的全部要求外,还要合理地给定光学系统各结构参数(曲率半径、厚度和间隔、折射率、色散系数以及偏心等)的公差。一个光学系统的公差给的是否合理,将直接关系到产品的质量和生产成本的高低。随着科学技术的不断进步,对光学仪器的精度要求也不断提高,公差设计越来越引起光学设计值的重视。
公差计算与设计的过程大致如下:
1)确定系统评价函数的允差限;
2)计算各种结构参数对评价函数的贡献量,即计算评价函数的变化量表;
3)分配公差。
表5为该系统各透镜的加工公差表,包含了光学透镜加工所需的面型、厚度、面倾角、折射率、阿贝数的公差,表6为光学系统装校所需的偏心、倾斜,空气间隔公差范围。由于该系统为高分辨率小F数系统,传递函数指标要求达到0.3@250 lp/mm。将系统的公差与光学设计手册核对可知,对光学透镜材料要求为光学1级玻璃,对零件的加工及装校要求属于精密仪器类产品的要求,系统的加工及装校性能良好。
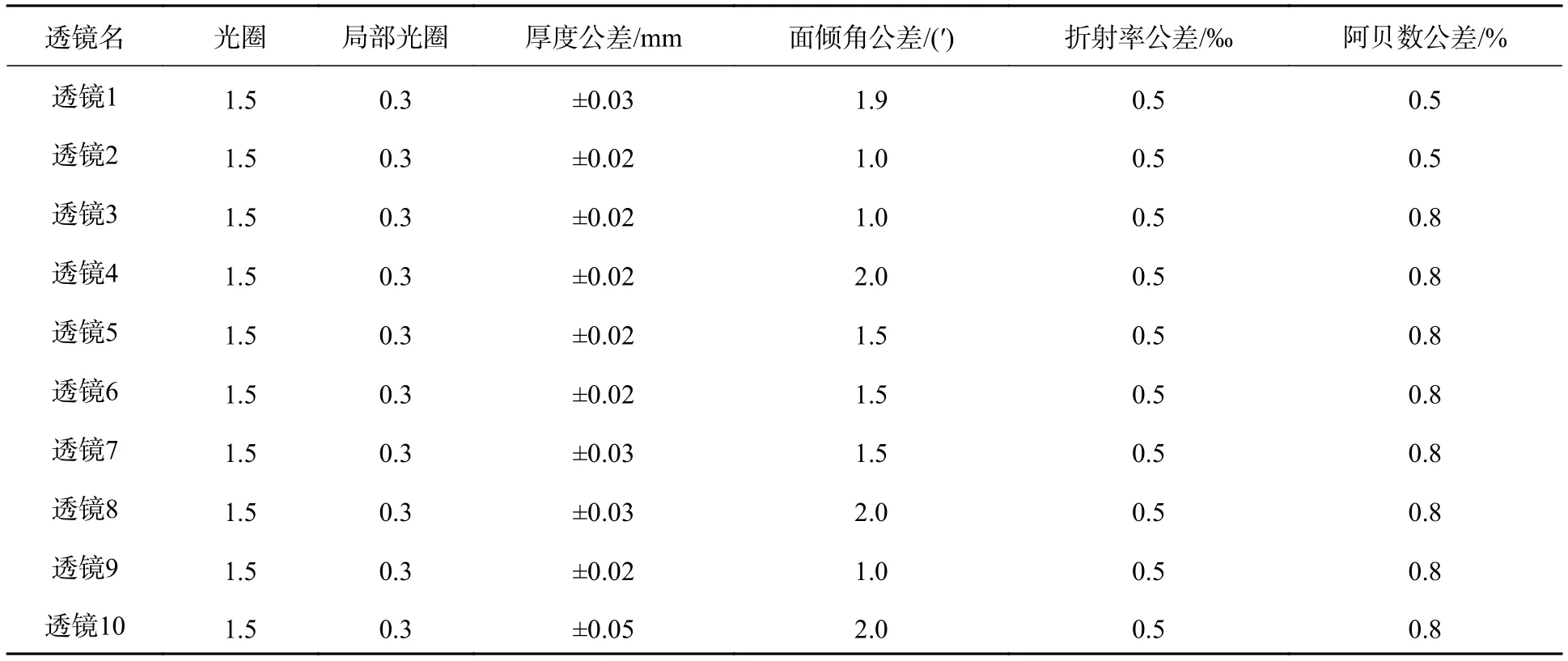
表5 透镜加工公差Tab.5 Tolerance of the lens processing
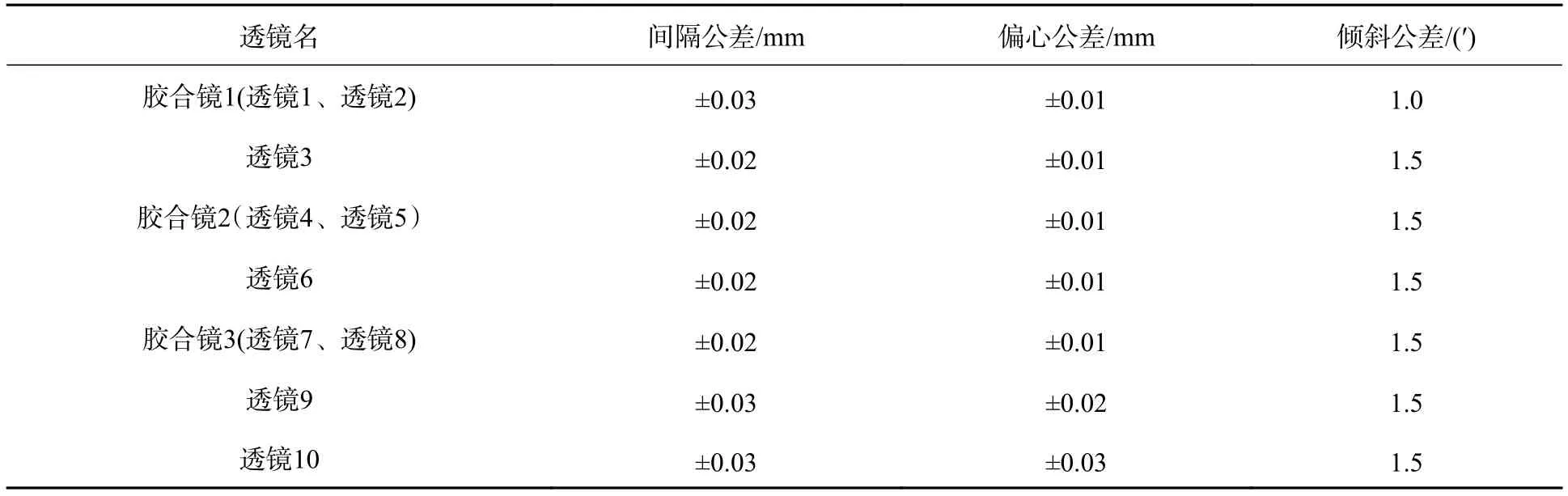
表6 透镜装配公差Tab.6 Tolerance of the lens assembling
利用Zemax软件按上述公差进行蒙特卡洛分析,分析结果表明,光学系统在0视场有85%的装配概率,并且MTF值大于0.33@250 lp/mm,0.7视场有85%的装配概率,并且MTF值大于0.28@250 lp/mm,装配工艺性良好,良品率高,符合系统指标要求。
4 结 论
本文设计了一款由球面透镜组成的高分辨率、微小型连续变焦光学系统。光学系统的各项技术指标都能满足使用要求,且加工装校性能良好。由于光学系统具有结构紧凑、体积小、重量轻、成像质量优良等特点,为实现无人机光电载荷的小型化设计创造了条件,因此,该光学系统可广泛应用于城市或水域巡逻、电力巡线、跟踪和监视等领域。
猜你喜欢
中国光学(2021年6期)2021-11-25
摄影与摄像(2021年12期)2021-10-01
艺术品鉴(2021年21期)2021-08-15
锦绣·上旬刊(2020年3期)2020-06-08
中国医疗设备(2019年1期)2019-01-15
摄影之友(影像视觉)(2017年10期)2017-11-07
大众摄影(2016年12期)2016-12-07
光学精密工程(2016年1期)2016-11-07
中国光学(2015年1期)2015-06-06
激光与红外(2015年10期)2015-03-23
