
基于任务驱动教学法的小学机器人教学模式研究
2019-05-30 03:31屈岑陈仕品罗志国
中国教育信息化·高教职教 2019年4期
屈岑 陈仕品 罗志国
摘 要:機器人教学作为中小学信息技术课程的新模块,它主要指通过搭建、运行、调试、优化机器人,激发学生学习兴趣、培养学生综合能力。本文主要阐述了机器人教学的基本理念,探讨了任务驱动教学法和协作学习,讨论出基于任务驱动法的机器人教学模式,最后以《声控玩具车》这一教学设计案例,使读者深刻体会任务驱动教学法下的中小学机器人教学模式。
关键词:机器人教学;任务驱动教学法;协作学习
中图分类号:G434 文献标志码:A 文章编号:1673-8454(2019)07-0046-4
2018年1月18日,中国人工智能标准化论坛发布了《人工智能标准化白皮书(2018版)》。白皮书分析了人工智能的技术热点、行业动态和未来趋势,研究制定了能够适应和引导人工智能产业发展的标准体系,进而提出近期急需研制的基础和关键标准项目。[1]当前,世界正掀起第三次人工智能浪潮,在此冲击下,引发了机器人教学的热潮。机器人教学是一个全新的教学领域,在我国仍旧处于初步探索阶段,不仅缺乏系统科学的理论指导,也没有成功经验可以借鉴。[2]2018年9月在人工智能基础教育论坛上有学者指出:“人工智能基本知识的了解应该从中学甚至小学阶段开始。”机器人教学是人工智能教育应用的重要形态,[3]是进行信息技术教育的有效载体,[2]能让学生学习电路电子学和程序设计的相关知识,有助于培养学生的问题分析能力、团队协作能力、动手能力和创新能力。但机器人教学作为信息技术教学的新模块,课程教学该如何开展,目前依然缺乏相关研究。
一、机器人教学与教育的基本理念
1.机器人教学与21世纪技能
2002年美国创建21世纪技能联盟,启动了21世纪核心技能研究项目,建立了技能框架体系,在世界范围内引起了巨大反响。“21世纪技能”由学习结果方面的内容和支持系统两方面组成。学习结果即核心素养,主要包括“学习与创新技能”、“信息、媒体与技术技能”、“生活与职业技能”三个方面,描述了学生在未来工作和生活中必须掌握的技能、知识和专业智能,是内容知识、具体技能、专业智能与素养的融合。[4]
张剑平等人[5]指出机器人教学能消除学生与现代科技的隔膜,培养勇于创新的精神、与他人合作的能力,训练学生的科学研究能力、掌握科学研究的基本过程,使学生更为关注科技对社会的影响。
2.机器人教育与基础教育课程改革
2001年,我国教育部正式启动了新一轮基础教育课程改革,颁发了《基础教育课程改革纲要(试行)》等一系列政策文件,初步构建了符合时代要求、具有中国特色的基础教育课程体系,并在全国试验、试点推行。[6]基础教育课程改革的核心理念是教育以人为本,教育以学习者为中心,关注学生本身,教师应教会学生学习,重结论的同时更重过程。
(1)综合目标观,机器人课程设置综合,整合了计算机控制、信息技术、电子、物理、机械等多门课程内容,体现新课改提出的课程整体性、开放性、动态性的要求,能培养学生的多视角和综合实践能力,以适应科学技术分化又综合的现实。
(2)内容联系观,在机器人教学中,教学内容体现“生活化”,让机器人的教学内容与学生的已有经验相联系,与社会生活相联系,将教学中学习的知识用于解决实际生活问题。
(3)学习方式观,新课改强调自主、合作、探究的学习方式,在任务驱动教学法下进行小组协作学习,能培养学生的自主能力、合作能力、创造能力。
(4)发展评价观,机器人教学不再将成绩作为量化评价学生的唯一标准,而是重视学生学习的过程评价,评价是为更好地促进学生探究实践,而不是检查验收。
二、机器人教学方法和策略
1.任务驱动教学法
任务驱动教学法要求在教学过程中, 以富有趣味性、能够激发学生学习动机与好奇心的情境为基础,以与教学内容紧密结合的任务为载体,是学习者在完成特定任务的过程中获得知识与技能的一种教学法。[7]任务驱动教学法是将学生需要掌握的知识与技能融入到任务中,教师引导学生充分进行自主学习,任务完成后可以形成作品,增加学生的成就感,提高学习积极性。
2.协作学习
协作学习是通过小组或团队的形式组织学生进行学习的一种策略,小组成员之间沟通、商榷、分工、合作,以最佳途径完成学习任务。[8]采用协作学习的方式,有利于发展学生个体的思维能力,增强学生个体之间的沟通能力、个体差异的包容能力以及对待学习的积极态度。[8]协作学习能让优生辅导带动差生,同时优生能在此过程中优化知识结构,两者都能相互提高学习效果。
三、基于任务驱动教学法的机器人教学模式
实用主义教育家杜威在《民主主义与教育》中提出“在做中学”的观点,他认为在活动中学习能让学校里知识的获得与生活过程中的活动联系起来,让学生主动建构知识体系。“做中学”是机器人教学背后的核心理念,充分引导学生回归生活、观察生活、发现现实问题、解决问题,同时培养学生的组织协调能力、策略思维能力和团队合作意识。
传统机器人课堂主要培养学生对机器人搭建的兴趣,没有将解决实际生活中的问题引入机器人教学,现实问题和教学严重脱节。对学生而言,机器人学习就是在课堂中玩乐高玩具,仅锻炼了动手操作能力,没有接触到系统的知识体系。对教师而言,机器人教学就是在学生自主搭建中给予搭建指导,教师缺乏引导学生对问题的思考以及对解决问题的探索。针对以上问题,结合基础教育课程改革的文件精神,笔者尝试提出了任务驱动法下机器人六段教学法,如图1所示。

六段教学模式分为三个任务阶段,即任务提出、任务执行和任务测评。在任务提出阶段要进行情境创设和新旧知识的学习与巩固。导,作为课堂教学的一个必需环节,要创造良好的氛围,调整学生的情绪,合理的教学情境导入是一堂课良好开端的关键,能激发学生的学习积极性,在创设情境过程中给予学生一定的暗示,引起学生对实际问题的思考。学,要由学生的“学”代替教师的“教”,变被动吸收为主动吸取。充分体现学生的主导地位。引导学生根据以前的学习经验,自主探究新知识,通过“猜想—交流—方案—验证—实施—反馈—评价”的方式完成从自学到合作学习的过渡,让学生感受学习方式的多元化。学习内容要包括对相关旧知识的回忆以及完成任务需要具备的前驱知识的学习。科学基础知识的学习,是为了帮助学生更好地分析问题,从而明确任务。
议,是指任务提出以后,学生分小组开始讨论,一个开放的、体现学生主体作用的课堂,是学生可以自由表达意见的空间。学生合作学习并内化知识,讨论出合理的解决方案。方案内容要包括搭建的雏形,以及编程实现的流程。对于学生来说,重在学会使用技术,会用头脑自主思考,拓宽自己的思维空间,进一步培养学生自主探究的学习方法:自己发现问题,分析问题,拥有能运用信息技术解决实际问题的能力。在学生分组学习过程中,教师观察学生的学习过程,对学习困难的学生提供个性化指导,通过案例或模块讲解引导学生找到问题解决的关键信息。
机器人教学,是理论与实践结合的课程。方案制定后,学生开始实施以小组为单位的机器人模型搭建,并使用图形化编程软件实现机器人控制。在此阶段,学生应具备学习的条件是要掌握搭建的基本方法,机器人主机、马达、传感器等基础知识、图形化编程软件的使用等。教师巡视、指导过程中要检查学生的任务完成情况,对错误的操作进行指导,针对小组问题进行答疑、引导。在议、动环节教师都需收集学习的共性问题,在活动总结环节给予学生集中答疑。在整个“动”的过程中,教师把更多的思考任务交给学生,这极大地激发了学生的学习兴趣和学习热情,实验、观察、验证、归纳、类比等活动对培养学生高层次的思维能力是非常有益的。
最后环节是任务测、评。测,包括性能的测试与评估、作品的展示与评价。初步完成搭建和编程的作品,要对它进行测试,评估作品的预期方案完成度,完成情况差的要进行调试和修改,调试完成后,进行小组作品展示,汇报作品情况。开展小组间评价,教师根据学生的学习过程进行过程性评价,对成果进行总结性评价。评价设计要遵循过程性、完整性、合理性、创意性等原则。
四、基于任务驱动教学法的《声控玩具车》教学设计
1.学习者分析
(1)学习者初始技能。在学习本课之前学习者应该掌握控制器的基本功能和构造,了解马达、齿轮、传感器的基础知识,熟悉使用各种零件进行机器人搭建,知晓如何使用图形化编程软件编程。
(2)学习者一般心理特征。本课程主要针对小学阶段的学习者,该年龄段的学生处于具体运算阶段。该阶段学生的感知觉从无意性、情绪性向有意性、目的性发展,空间、时间知觉的方向发展;具体、直观、新鲜的事物易引起学生的注意;运算阶段学生逐渐克服以自我为中心,多方面看问题以解决问题。
(3)学习者的学习风格。本课采取集体化教学,所以学习者的学习风格具有多样性的特点。教师分组时应考虑不同学生的学习风格,取长补短,小组成员之间相互学习。
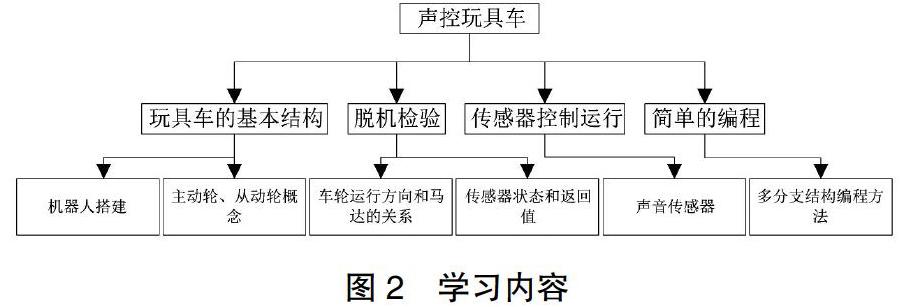
2.学习内容分析
机器人竞赛作为机器人教学的一种主要形式,其竞赛项目中多以多功能车为基础完成比赛任务。完成多功能车的制作,要经过设计、搭建、编程等复杂过程,有益于学习者多种能力的培养。(见图2)
3.学习目标
(1)知识与技能。理解声音传感器的原理与用法;掌握条件判断、循环语句的使用;小组分享成果,训练学生的言语技能。
(2)过程与方法。以任务驱动,在教师的指导下,小组协作编程,掌握声音传感器相关参数的意义,掌握多分支结构的方法。
(3)情感态度与价值观。在任务驱动教学法下,体验完成任务带来的成就感;在小组协作过程中感受团队精神,克服以自我为中心;在与人交流的过程中体验到分享交流的乐趣。
4.学习策略制定
(1)教学组织形式。小组协作学习。(3人一组最优)
(2)教學方法的选择。任务驱动法、讲授法、演示法。
(3)教学媒体资源的选择。硬件条件:网络联机的机房、协作学习课桌、平板或笔记本电脑(至少每小组一台),机器人(至少每小组一套)。软件条件:Scratch、VJC等与机器人匹配的图形编程软件。
5.教学评价设计
在参考相关评价表的基础上制定了如表1所示的评价量表,为教师和学生对过程和成果进行评价提供一定依据, 该评价量表可用于组内评价和组间评价,也可作为档案袋评价的内容。

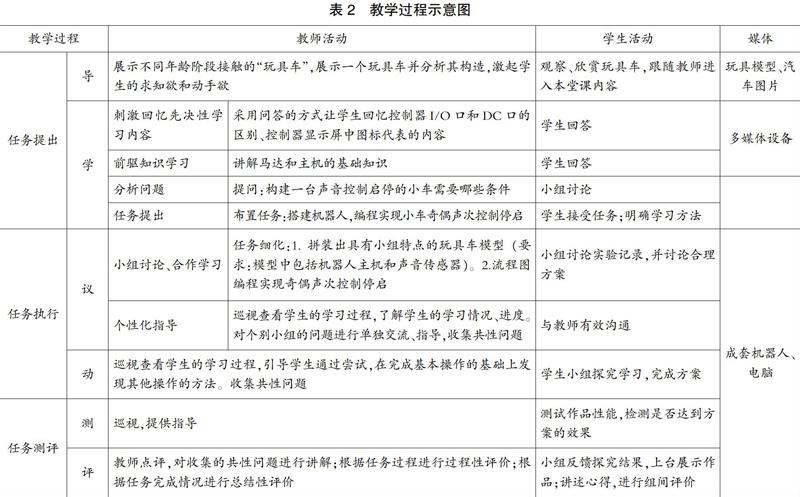
五、基于《声控玩具车》教学设计的教学过程(见表2)
六、结束语
机器人教学课程是小学信息课程的新兴内容,它综合了多个学科。本课中学生能顺利完成制作声控玩具车的任务,究其原因在于采用了国家新课程标准中的三维目标,用行为动词使目标具体化,避免含糊性。我们不能直接观察学生已获得的新技能,但能通过观察学习者在需要应用某性能的任务中表现出令人满意的行为来推断该性能已被习得,学习者表现出的特殊行为常常与性能相混淆。[9]所以明确表达目标中的每个成分能准确判断学生是否达到目标,进行下一步学习。在机器人学习过程中,将学习知识与发展学生思维能力和进行价值观教育相结合,培养学生的合作精神、共享理念。
采用“任务驱动法”进行教学,能使学生在学习中拥有自主感,从而感到学习的乐趣,给学生思维的空间,发现、探索的机会,将教师从牵引者转化为促进者,把学生的时间、权利交还给他们,让学生主动进行建构,从而使他们明白学习的过程是发现问题、解决问题的过程。运用协作学习的方法,会更多地关注学生,教师会尽可能考虑每个学生的学习状况,进行合理分组,形成优生差生互补,相互学习。
参考文献:
[1]光明网. 《人工智能标准化白皮书(2018版)》发布[DB/OL].http://tech.gmw.cn/2018-01/19/content_ 27390491.htm,2018-01-19.
[2]张剑平,王益.机器人教育:现状、问题与推进策略[J].中国电化教育,2006(12):65-68.
[3]梁迎丽,刘陈.人工智能教育应用的现状分析、典型特征与发展趋势[J].中国电化教育,2018(3):24-30.
[4]师曼,刘晟,刘霞,周平艳,陈有义,刘坚,魏锐.21世纪核心素养的框架及要素研究[J].华东师范大学学报(教育科学版),2016(3):29-37,115.
[5]王益,张剑平.在机器人教育中提升学生的科学素养[J].中国教育信息化,2007(18):34-36.
[6]教基[2001]17号.教育部關于印发《基础教育课程改革纲要(试行)》的通知[Z].
[7]李秀明,武怀生.“任务驱动”教学法的教学应用——《Word图文混排》教学设计[J].中国电化教育,2007(1):88-90.
[8]赵建华,李克东.协作学习及其协作学习模式[J].中国电化教育,2000(10):5-6.
[9]加涅著,皮连生、庞维国译.教学设计原理[M].上海:华东师范大学出版社,2004.
(编辑:王天鹏)
猜你喜欢
科学与财富(2016年29期)2016-12-27
新教育时代·教师版(2016年31期)2016-12-07
求知导刊(2016年30期)2016-12-03
科教导刊(2016年25期)2016-11-15
