
基于Sysmac的并联机械手控制系统设计
2019-05-27 08:09杨亚
韶关学院学报 2019年3期
杨 亚
(芜湖职业技术学院 机械工程学院,安徽 芜湖241000)
机械手是根据预先编制好的程序实现预期动作的机器.它不仅可以代替人完成复杂或危险的行为,保证人身安全[1].同时,作为自动化生产过程中的重要设备,可以大大提高生产效率.基于Sysmac的并联机械手具有刚度大、惯性小、承载能力强、无累计误差、热形变量较小等优势,与目前广泛应用的串联机械手构成互补关系,可以作为航天飞机上和潜艇救援的对接器、精密操作的微动器、工业上的大件装配机器人[2]等,可以预见并联机械手在未来将有十分广阔的发展前景.
1 控制系统的设计
1.1 2自由度机械手组成与原理
机械手拟采用启帆设备公司生产的型号为SW-300的2自由度并联机械手,其结构如图1所示.该装置由伺服电机、主动臂、从动臂和平动盘构成.静平台上安装两个伺服电机,由NJ控制器发出指令给伺服驱动器,驱动伺服电机经减速器带动主动臂转动,与主动臂连接的从动臂动作,进而控制平动盘在平面内作二维移动[3].
同时,平动盘安装不同机构可以进行手抓、钳夹和吸取等不同的动作.本系统平动盘处采用电磁铁,当平动盘移动到铁质物体上方时,通过控制器的指令使电磁铁通电来达到吸取目标的要求.
1.2 控制系统结构
整个系统的连接方式如图2所示,NJ-501通过EtherNet/IP与PC和HMI相连,实现对控制器的配置、编程、仿真和监控,再通过EtherCAT连接伺服驱动器,伺服驱动器与伺服电机需要通过专用电缆连接,接受电机编码器的返回信号,形成全闭环的控制回路,实现对伺服电机快速精确的运动控制[4].

图1 2自由度并联机械手结构图
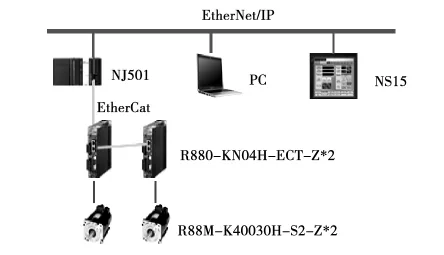
图2 控制系统网络结构
2 运动学分析
机械手平动盘的运动是平动,而伺服电机的运动是转动,伺服电机通过改变转动角度以驱动并联机械手工作.平动盘中点坐标(x,y)如何与伺服电机转动的角度(θ1,θ2)相对应,就是运动学分析所要考虑的内容.如图3所示,把原系统的机械手简化为平面6杆铰链结构,主动臂长Lt,从动臂长Lb,两轴间距L1,平动盘长L2,建立以静平台所在直线为x轴,其中点为原点的坐标系,基于此坐标系进行运动学分析.
平动盘的位置定义在平面直角坐标系下,并联机械手系统设计的关键是实现平面直角坐标系(虚轴)与电机转角(实轴)的正确转换,虚轴与实轴之间相互转换包括运动学正解算法与运动学反解算法两部分[5].

图3 机械手数学模型
2.1 运动学反解
运动学反解主要是通过机械手末端的位置来确认转动的角度和各关节转动位置,即可以把末端位置(x,y)转化为电机转角(θ1,θ2).
两岸经济交流是重点,在经济交往过程中,社会文化的交流也会不断深化。政策除了为台商经贸活动提供保障为,也为文化交流提供更加广阔的平台。例如在第55条中,支持贵台两地开展中国传统文化交流活动。两岸一家亲,中华文化博大精深,文化交流更有助于经贸活动的友好开展。并且鼓励台湾青少年来广西开展研学活动,有助于台湾青少年加深对大陆的了解。
把图3的数学模型作简化,主动臂与从动臂都内平移,平动盘简化为一个点,轴间距缩短至L1-L2.运用几何画板按比例绘出机械手的简化数学模型,如图4所示.由于所做简化为平移,故角度的相对位置不变,与此同时端点坐标保持不变,所以图4的化简不失一般性.

图4 简化反解数学模型
由图4简化反解数学模型可知,A点坐标(-(L1-L2)2,0),规定左轴从0°开始逆时针旋转为正角,顺时针旋转为负角;右轴则相反.不妨设l=(L1-L2)/2,则向量AC=(x+l,y)的模及其与x轴正半轴夹角分别为:

在△ABC中,三边长均已知,由余弦定理得:

故左侧电机旋转角度为:

同理得出右侧电机旋转角度:

其中:

由几何关系不难证明,当θ1或θ2<0°时,上式仍然成立.
2.2 运动学正解
正解主要是通过机械手旋转的角度来确认机械手的各个关节的位置以及末端的位置,正解有断电保持的作用,如果系统突然断电,上电后可以从伺服电机的绝对值编码器记录的电机转角推算出末端的坐标.采用平面几何学推导,直观、简单,可以获得工作平面内满足条件的合理解.
做出如图5所示的辅助线.同样规定左轴从0°开始逆时针旋转为正角,顺时针旋转为负角;右轴则相反.令

在直角梯形FBDG中:

若直线BD在O点下方,即,如图6所示,则在△ABD中,由余弦定理得:


图5 简化正解数学模型
若直线 BD 在O 点上方,即 α1+α2<0,如图 6所示,则:

在等腰△BCD中:

在△COB中,由余弦定理:

所以向量 OC 与 x 轴正半轴的夹角为 ø+α1+π(α1可能为负角),即工作端 C 坐标为:|OC|(-cos(ø+α1),sin(ø+α1)).
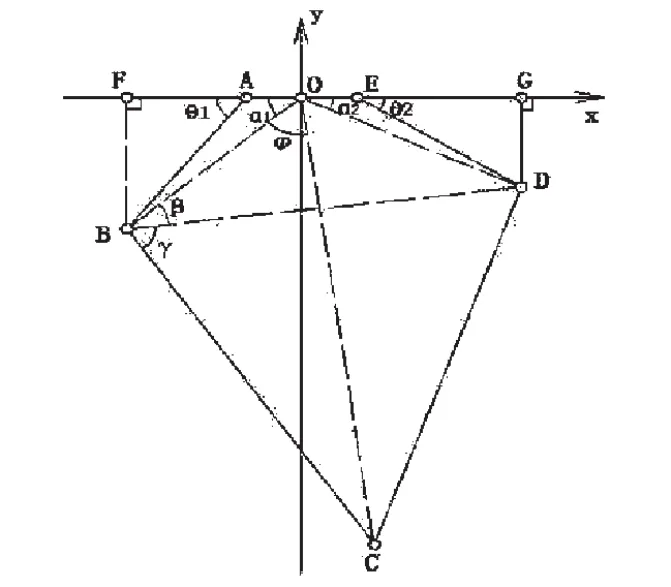
图6 简化正解数学模型特殊情况
3 并联机械手的软件设计
2自由度并联机械手运动控制软件编程在Sysmac Studio环境中完成,主要涉及到运动控制轴建立、机械手控制器程序设计、人机界面设计等,下面对其进行介绍.
3.1 运动控制轴建立
3.1.1 实轴设置
这里的实轴指伺服器轴,是EtherCAT从站伺服驱动使用的轴.在“运动控制设置”的“轴设置”添加2个实轴和2个虚轴,添加完成后如图7所示.两个实轴重命名为Axis_L和Axis_R,两个虚轴重命名为Virtual_X和Virtual_Y[6].

图7 添加实轴和虚轴
因为实轴的转动以角度度量,所以“显示单位”应选择“度”.本设计所用欧姆龙G5系列的伺服电机,使用了一个带有17位绝对值编码器,每转131 072个脉冲,机械手上还安装减速比为33的减速机,所以“电机转一周的指令脉冲数”应设置为4 325 376脉冲/rev.同时,“电机转一周的工作行程”设置为360度/rev.轴的“操作设置”中把“最大速度”设置成4 000度/s,“最大点进速度”设置成100度/s,其他数值不变.轴的“限位设置”中,“软件的限位”选择“命令位置的立即停止”,正负软件限位分别设置成100度和-45度,防止机械手应伺服电机旋转过度而故障.轴的“位置计数设置”中,“计数模式”选择“线性模式”,编码器类型改为绝对值编码器.在轴设置中其他的设置均保持默认即可.Axis_R轴设置与Axis_L轴类似,唯一的区别是节点不同.
3.1.2 虚轴设置
虚轴指虚拟伺服轴,只用于运动控制功能块内,实际伺服驱动不使用它们,主要用作主轴进行同步控制.
两个虚轴Virtual_X和Virtual_Y设置相同,只需更改“单位换算设置”中的“显示单位”即可轴设置完成后,可以直接在Sysmac Studio中使用轴变量和轴指令对相应轴进行控制.
3.1.3 轴组设置
轴组有多个轴组成,用来完成多轴的复杂操作,如直线插补和圆弧插补等.本系统需使用由两个虚轴组成的轴组,构成笛卡尔坐标系,通过反解算出电机的转角并传递给实轴,机械手便可实现按预定轨迹运动[7].
3.2 机械手控制器程序设计
程序开始后,首先判断是否开启电机抱闸,开启后机械手进行原点矫正,并对系统的数据进行初始化操作;然后准备工作完成后,伺服电机就位,这时开始选择手动或者是自动模式.手动模式下,主要使用人机界面上的方向键控制机械手在边界范围内任意移动,同时手动操作需事先给定目标点,使机械手直线移动到该点;自动模式下,可以实现机械手循环搬运货物,循环结束后自动回原位,准备接收下一条指令.当发生越限或者轴组故障时进行报警并停止,清除错误后,重新判断是否开启电机抱闸,进行下一次循环,具体的软件设计流程如图8所示.

图8 控制系统工作流程图
3.3 人机界面设计
人机界面不仅能方便对机械手进行控制,还能直观的检测机械手的运动轨迹.本系统选用欧姆龙生产的触摸屏NS15-TX0[]-V2可以与NJ控制器通过EtherCAT连接,使用CX-Designer设计软件编写人机界面.具体的界面有:参数设置界面、初始化界面和仿真监视界面[8].
在运行机械手前,需要将机械手的相关参数输入到参数设置界面,实现对机械手的精确监控.初始化当位灯亮起时,代表机械手准备就绪.
仿真界面可以绘制机械手的动态曲线,实时显示机械手的各项参数,并能对机械手的故障进行报警,可以进行手动或自动运行.点击“Calculate_Start”,会显示出机械手的位于初始位置的曲线,如图11所示.点击左下角的方向键可以控制机械手的移动,到达边界时,显示“Out Of Range”警告,不能继续向该方向移动.在“Go to targrt”按钮右侧可以输入坐标,按住“Go to targrt”可以使机械手移动到指定位置.“Magnet Control”则是控制机械手末端电磁铁的开关,用于抓取或放下物体.点击右上角的“AUTO”键可以使机械手进入自动模式,“SET”下的输入框用来设置移动物体的个数,“Remainder”则显示剩余的物体个数.在自动运行过程中,可以随时按“Go_Home”中断自动模式,使机械手返回原点.
点击右上角的“AUTO”键可以使机械手进入自动模式,如图12所示,机械手自动要完成的动作是把A处的货物搬运到B处,实验表明机械手可以精准的将货物从A处运到B处,实现了机械手的高速、精确、平稳运行.
4 结语
2自由度并联机械手控制系统的重点是机器人的运动学分析,尤其是正向运动学求解,针对当前正解多个解析解的问题,提出了一套新的算法.整个控制系统的编程遵循简单直观的原则,逻辑调整清晰,各部分的编写采用梯形图和ST语言相结合的方法.运行速度快、精度高、稳定性好,能较好地完成工业现场搬运任务.
猜你喜欢
微特电机(2020年11期)2020-12-30
河北省科学院学报(2020年1期)2020-05-25
重型机械(2019年3期)2019-08-27
制造技术与机床(2018年11期)2018-11-23
电子制作(2018年17期)2018-09-28
通信电源技术(2018年3期)2018-06-26
电子制作(2016年1期)2016-11-07
铁道通信信号(2016年1期)2016-06-01
海军航空大学学报(2015年1期)2015-11-11
铁路通信信号工程技术(2015年4期)2015-02-28
