
基于SVPWM的变频器死区补偿研究
2019-05-27 03:43叶为奇郑明辉魏海峰
微特电机 2019年5期
叶为奇,郑明辉,魏海峰,曾 峰,徐 蔚
(1.江苏科技大学,镇江 212003;2.常熟瑞特电气股份有限公司,常熟 215500)
0 引 言
由于变频器中的功率元件IGBT本身存在导通延时和关断延时(大于导通延时),为了改变这种情况,在控制脉冲前后加入死区时间。尽管死区时间所占脉冲周期很短,一般只有几微秒,却能够影响变频器电压波形和电机电流波形,不仅提高了其中的谐波含量,而且降低了整个变频系统的效率和性能[1]。在驱动三相异步电机等电机系统中,输出波形含有大量谐波,尤其是幅值较高的低次谐波,本文通过参数对比方法,可以使得输出波形具有电压波形质量高、电流纹波小、直流电压利用率高等优点,通过变频系统最终输出的噪声和振动来加以验证。
目前,关于死区补偿的研究已经有了较大的进展。死区补偿可以从两个方面入手,一方面是通过在硬件电路上增加外部补偿电路进行补偿;另一方面是通过软件算法进行补偿。软件补偿是通过软件程序进行设计,需要高品质的处理芯片,可分为时间补偿和电压补偿[2]。文献[3]通过时间和电压两种补偿方式对正弦和SVPWM逆变器进行改进。文献[4]通过迭代控制策略用旋转变换方式进行补偿。文献[5-6]提出通过在线补偿三相桥臂,对死区时间进行实时同步补偿。文献[7]对满足不同调制程度的补偿方式进行了研究。文献[8]提出了通过扰动观察器对死区时间进行旋转坐标系变换。本文在电流大于零和小于零时只对相应作用触发脉冲进行死区设置,计算相应设定电压空间矢量分量,并验证补偿策略的可行性。仿真对比了输出波形中的不同奇次的谐波含量,实验验证采用死区补偿策略后,电机运行中的振动与噪声都得到了不同程度的下降,对系统的运行起到稳定作用。
1 死区效应分析
在变频器控制IGBT对电机负载进行三相交流输出的过程中,由于功率元件本身存在导通与关断延时,并且在死区时间内整个桥臂上下两部分是不导通的,实际输出电压由续流二极管决定。当所在桥臂上管导通时承受导通压降(I>0),规定流向负载为正;当所在桥臂下管导通时承受导通压降(I<0),规定流向负载为负。
图1为三相变频电气图,控制三个桥臂上的功率元件的导通时间来决定输出电压矢量。图2为电流流向示意图,流向电机负载为正电流(i>0);流出电机负载为负电流(i<0)。

图1 三相变频电气图
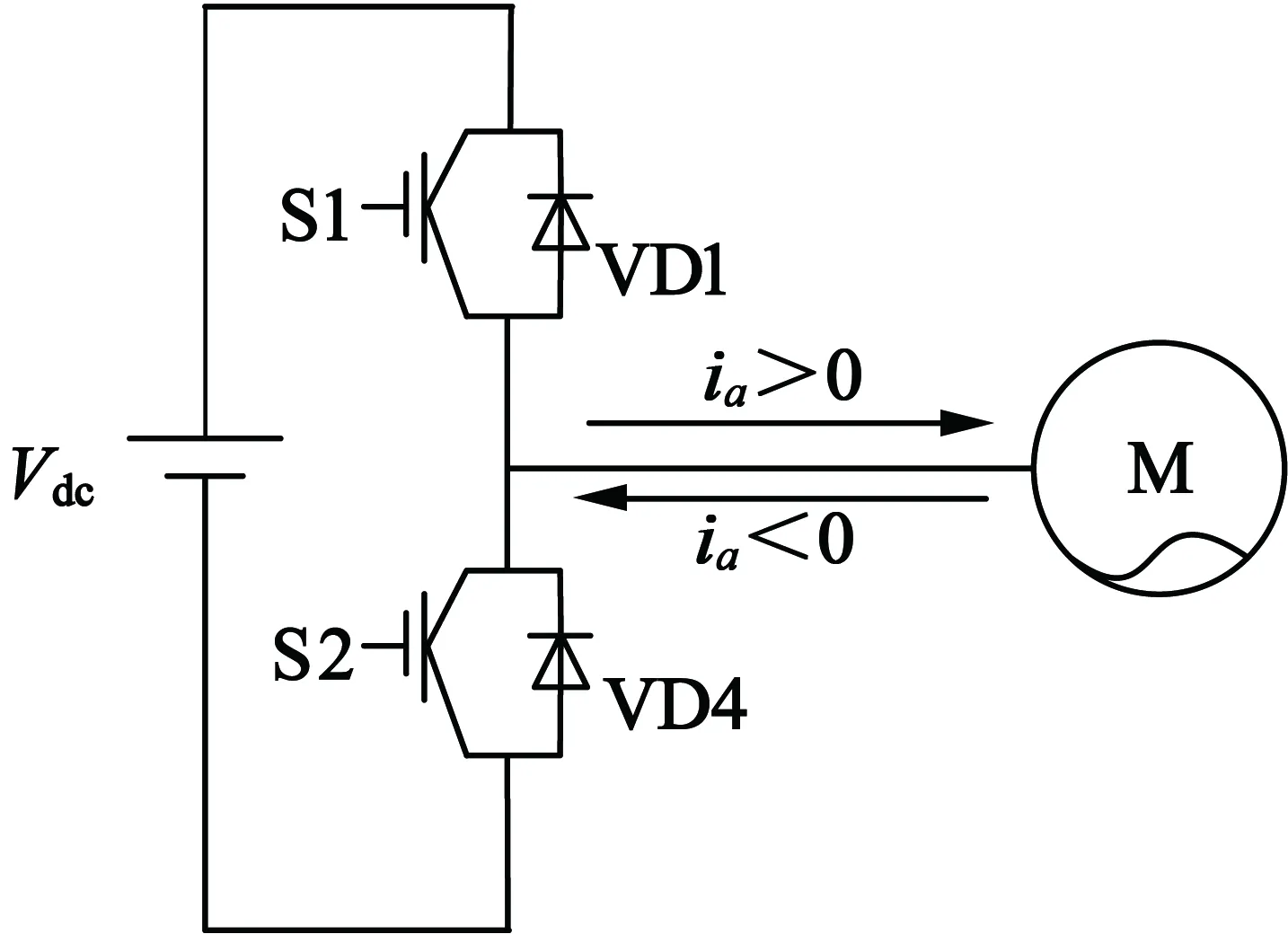
图2 电流流向示意图
图3为A相桥臂波形图。图3(a)为理想脉冲波形图,图3(b)为实际脉冲波形图,由于存在导通和关断的延时,因此脉冲波形有一定的延迟。当IGBT在断开的过程中时,负载端电压是根据续流二极管上的电流流向来决定的,当ia>0时,由于死区时间作用在上升沿,并且脉冲发生是两边对称的,实际输出脉冲宽度比理想的脉冲宽度窄,缩短的时间为(Td+Ton-Toff)/2,如图3(c)所示;当ia<0时,由于死区时间发生在下降沿部

图3 A相桥臂波形图
分,并且脉冲发生存在对称性,输出实际脉冲宽度比理想的脉冲宽度宽,增加的时间为(Td+Ton-Toff)/2,如图3(d)所示。平均畸变电压ΔV可以表示:
(1)

式中:Ts为脉冲发送间隔时间;ton为功率元件的开通延迟时间;toff为功率元件的关断延迟时间。
根据三相电流的极性,三相平均畸变电压分别表示如下:




2 死区补偿方案
死区补偿的方案是建立在SVPWM技术基础之上的,先对SVPWM技术进行说明。SVPWM技术控制脉冲的作用时间,使输出电压矢量所形成的圆形旋转磁场符合电机的运转特性,再划分不同的区域(Ⅰ~Ⅵ),通过坐标变化,将输出电压矢量转变为对应的脉冲作用时间。为了降低功率元件的损耗,相邻桥臂之间的切换,按照100-110-010-011-001-101-100的顺序,进行脉冲调制,实际扇区分布图如图4所示。

图4 空间矢量扇区分布
输出电压矢量Uout在不同时刻所在的扇区也在变化,Ua和Ub分别表示所在扇区的坐标分量,通过矢量运算可以表示为U1和U2的组合。根据U1和U2的作用时间分别表示为T1和T2,作用时间T1和T2可以通过Uout所在扇区的夹角θ来表示,以下列出表达式:
(6)





(10)
式中:TPWM为一个PWM周期;Td为死区时间;TE=TPWM-Td。


图5 实际电压矢量分解图
在实现死区补偿电压矢量所在扇区的分解与合成过程中,按照SVPWM技术在第Ⅵ扇区(0~π/3)进行分析论证。图6为第Ⅵ扇区死区时间补偿前后信号图,图6中的阴影区域为死区时间。
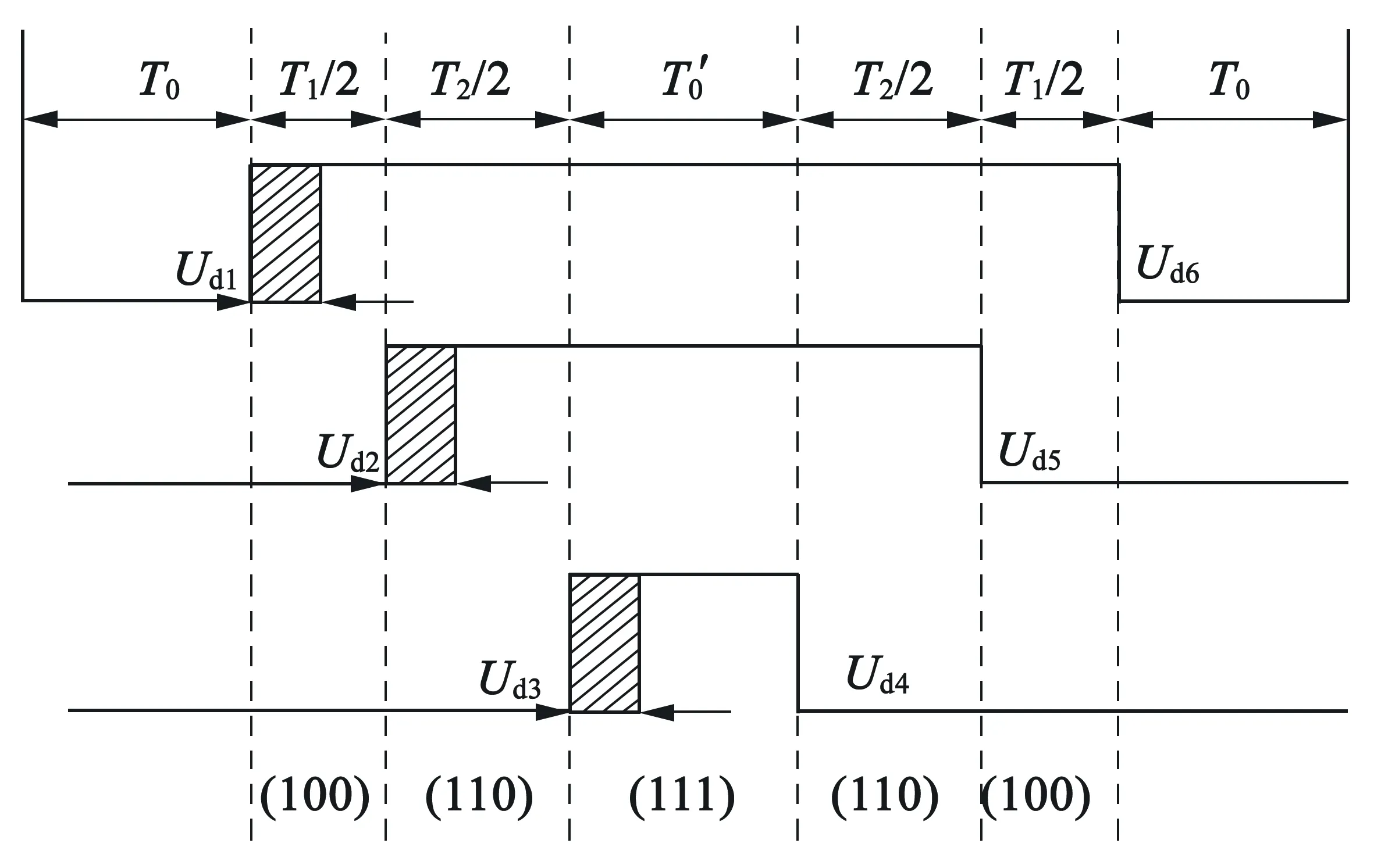
图6 第Ⅵ扇区触发信号图
死区矢量的计算遵循以下几点原则:
(2) 为了减小IGBT开关器件的开关次数带来的损耗,当电流大于零时(i>0),此时对应的死区时间无作用;当电流小于零(i<0)时,此时对应的死区时间无作用。
如果当前时刻ia>0,ib<0,ic>0,Ud1,Ud2,Ud3处于脉冲序列的上升沿,其中Ud1,Ud3为无效矢量;Ud4,Ud5,Ud6处于脉冲序列的下降沿,其中Ud5为无效矢量。可知,Ud2为(100),Ud4为(100),Ud6为(111)。其中,Ud6为零矢量,则在这个周期中:
U=Ud2+Ud4+Ud6(11)

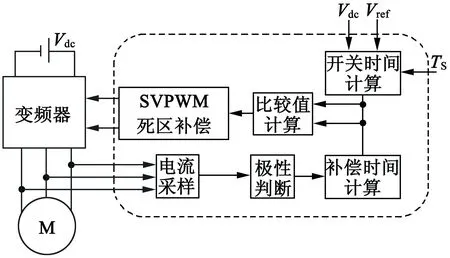
图7 死区补偿原理框图
3 实验仿真
在MATLAB中搭建了整个系统的模型,测量相应的电流电压波形,如图8、图9所示,通过功率分析仪对波形进行相应的谐波含量分析。通过对比可以看出,输出谐波畸变率降低了,输出波形更加圆滑,从仿真角度表明该方法的可行性。
以一台10 kW三相异步电机为实验对象,对实际电机的输出相电流波形以及振动数据进行测量和对比。图10为测试现场图片。图11,图12为实际电机运行中输出端的电流测试波形。
图13为无死区补偿情况的实际电机运行中测得各机脚的振动结果,图14为死区补偿后的电机运行中各机脚的振动结果,结果表明在低频段有明显的降低效果。

图8 无死区补偿的相电流波形及THD

图9 死区补偿后的相电流波形及THD
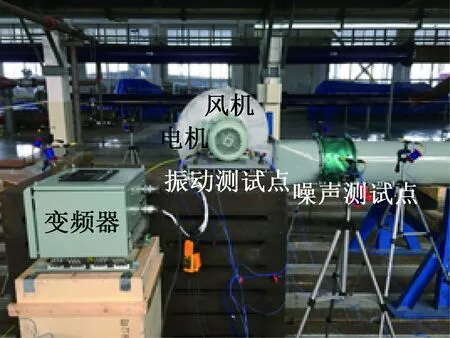
图10 测试现场
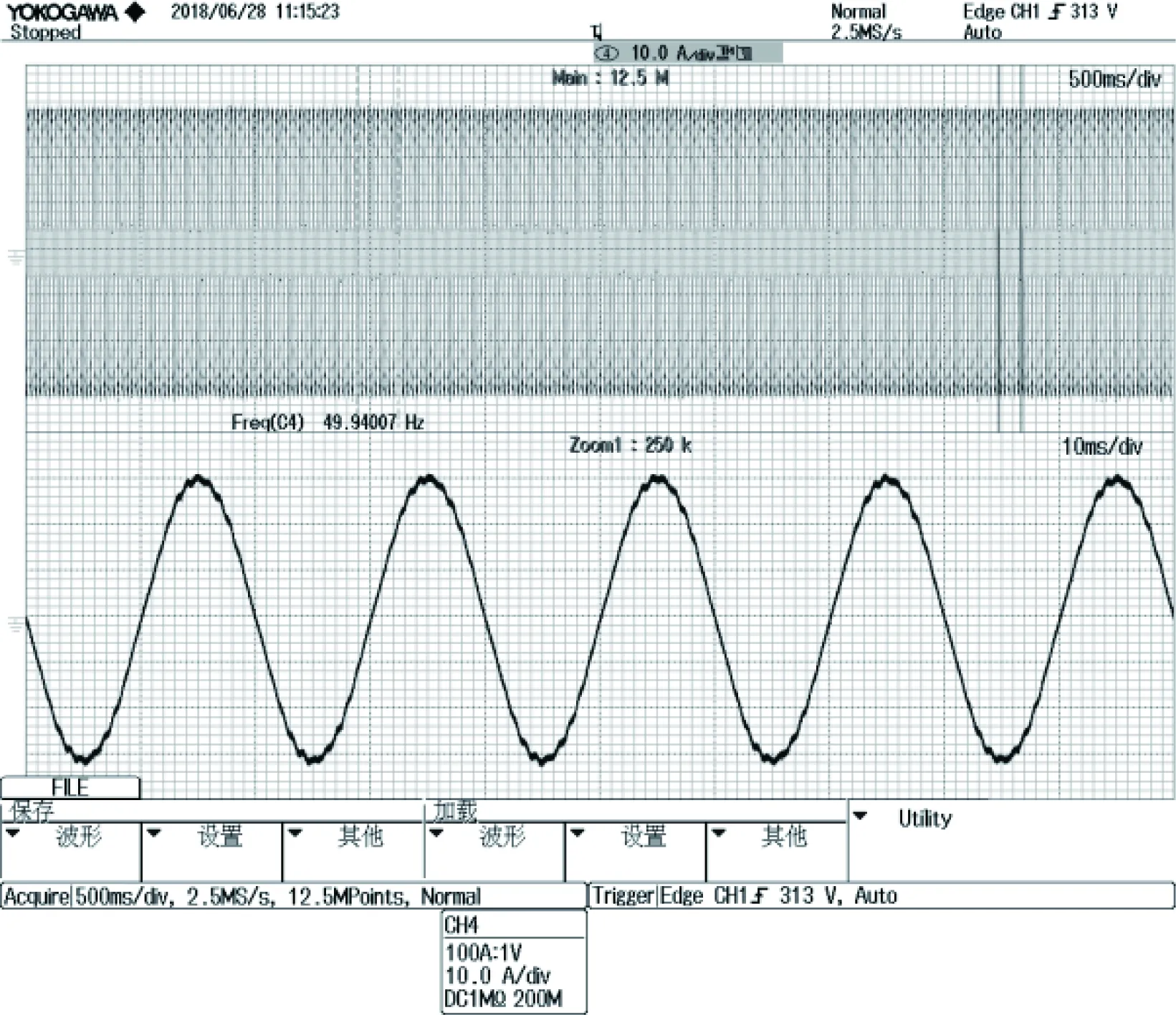
图11 实际输出电流波形
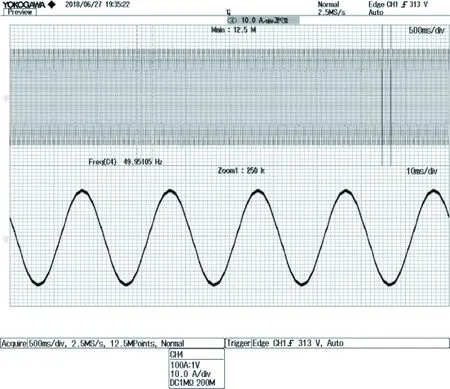
图12 实际输出电流补偿波形

图13 无死区补偿时电机机脚振动
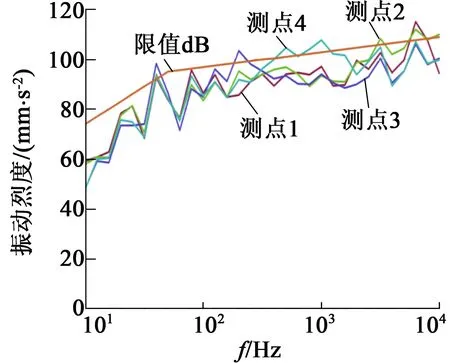
图14 死区补偿后电机机脚振动
图15为无死区补偿情况的实际电机运行中测得噪声的数据,图16为死区补偿后的电机运行中噪声的数据,结果表明在低频段有明显降低噪声的作用。

图15 无死区补偿电机噪声

图16 死区补偿后电机噪声
4 结 语
本文在传统死区补偿的基础上,研究了一种死区补偿矢量合成方法,通过死区补偿矢量和实际合成矢量相转换并建立对应的表格。
以一台10 kW三相异步电机为实验对象,从理论、仿真以及实验三个方面进行研究,并且从最终得到的振动和噪声数据中验证该补偿方法的有效性。
猜你喜欢
电子技术与软件工程(2022年6期)2022-07-07
南北桥(2022年2期)2022-05-31
北京航空航天大学学报(2021年9期)2021-11-02
中学生数理化·高一版(2021年11期)2021-09-05
科学技术创新(2021年10期)2021-04-26
防爆电机(2020年4期)2020-12-14
航空学报(2018年12期)2019-01-18
雷达学报(2018年5期)2018-12-05
汽车维护与修理(2018年9期)2018-10-31
航空世界(2018年12期)2018-07-16
