基于GAMIT对国家GNSS基准站进行的北斗基线解算分析
2019-05-24 08:56刘洋洋党亚民许长辉
测绘工程 2019年3期
刘洋洋,党亚民,许长辉
(中国测绘科学研究院 大地测量与地球动力学研究所,北京 100830)
北斗卫星导航系统(BeiDou Navigation Satellite System, BDS)是中国具有完全自主知识产权研制的继美国全球定位系统(Global Positioning System, GPS)和俄罗斯卫星定位系统(Global Navigation Satellite System, GLONASS)后第3个成熟的卫星导航定位系统;美国的GPS系统自从上世纪建成以来,已经占据大半市场[1];随着北斗导航卫星系统的逐步建立,已经向亚太大部分地区正式提供连续无源定位、导航、授时等服务,且在亚太地区,BDS较GPS能提供更好的定位服务,北斗系统在定位精度等方面不逊GPS系统[2-4]。
GAMIT软件是美国麻省理工学院 (Massachusetts Institute of Technology,MIT)与斯克里普斯海洋研究所 (Scripps Institution of Oceanography,SIO)共同研制的国内外公认的高精度数据后处理软件之一,由于其优良的解算特性,在国内外GPS数据高精度解算时得到广泛应用[5],但是由于BDS与GPS系统在星座构型、坐标框架、时间系统。信号频率等方面有明显差异,GAMIT 10.6版本之前只能解算GPS数据,对于BDS数据不能进行有效处理[6],国内学者自行利用算法程序进行北斗数据的处理,得到一些较可靠结论。文献[7]自行编制了北斗单历元定位算法程序,利用国内某城市变形监测数据进行处理。并与Track解算的GPS数据进行对比分析;文献[8]编制程序对北斗数据进行处理,与中海达TGO软件、天宝TBC软件和Bernese软件进行对比分析;文献[9-10]根据程序算法精确固定模糊度进而对北斗基线数据进行解算,也获得较好结果。但是这些文献所采用的分析方法均是自行编制的软件,且采用的数据质量难以评定,得到的结论缺乏可信度,本文采用GAMIT 10.61软件,对中国国家GNSS基准站的多系统观测数据进行北斗、GPS单系统数据解算,并采取自行编制的程序进行BDS/GPS组合基线解算分析,根据基线解算结果进行对比分析。
1 基线解算模型
高精度基线解算利用双差观测量建立误差方程,因双差观测组合可以消除接收机钟差、卫星钟差,削弱对流层延迟、电离层延迟、卫星星历误差,且保留载波相位的整周模糊度为整数,也能消去解算参数,缩短解算时间[11],采用载波相位测量的观测值方程式为
(1)

根据式(1)进行单点定位,构造基线在观测值间求差并利用差分观测值进行相对定位[12-13],观测方程为
(2)

(3)
式中:P为伪距观测值;dX,dY,dZ为基线向量的坐标改正数;λ为载波频率的波长;l,m,n为3坐标方向上的方向余弦;Mp,ML为伪距和相位的多路径误差;εP,εL为伪距和相位的观测噪声。
2 算例分析
2.1 单系统基线解算分析
利用GAMIT 10.61版本,对国家GNSS基准站的4系统多频观测数据进行解算,分别进行单BDS/GPS的数据解算,解算日期为2017-04-10—2017-04-29共计20 d,选择测站分布均匀共75个站,站点分布见图1。解算设置观测值为LC_AUTCLN,解算策略选择BASELINE,截止高度角设置10°,设置采样间隔30 s,海潮模型选用FES2004,对流层映射函数设置为VMF1GRD.2017,大气潮汐改正模型、大气质量负荷改正模型设置为atl.grid、atmdisp_cm.2017,根据以下解算方案进行分析:方案1单独解算北斗系统的观测数据;方案2单独解算GPS系统的观测数据。
标准化的均方根误差(normalized root mean square,NRMS)表示解算出的单时段基线值与其加权平均值的偏离程度, NRMS值是衡量GAMIT基线解算质量的重要指标之一,计算式为
(4)

一般认为NRMS值应小于0.3,在0.25左右即可认为解算成功,否则需要检查原因,重新处理。若NRMS值大于0.5,表明基线解算是有问题的,可能性有未除去大周跳、某解算参数设置有问题、解算模型设定有误等情况。NRMS值越小,则代表基线解算的精度越高[14],本次2种解算方案的基线解NRMS值结果见图2。
从图2可以看出,两种方案的所有解算天数的NRMS值小于0.25,满足解算要求,且解算效果较好;两种方案的NRMS值相差较小,从趋势上看来,方案2较方案1的解算效果更好,即在基线解算时,

图1 所选取测站分布图

图2 不同方案单天解基线NRMS值
GPS的效果略BDS较好,原因可能在于:测站接收的BDS的数据质量不如GPS、GAMIT对BDS系统数据解算添加的改正模型不如对GPS的改正效果精度高。
GAMIT采用双差观测量,在组合成基线解算时,会受到测站距离的影响,分析不同系统解算出来的基线长度均方差值(Root Mean Square,RMS),将RMS值的变化量统计作为纵轴,横轴为基线长度,做升序排列,并将两方案结果对比,见图3。
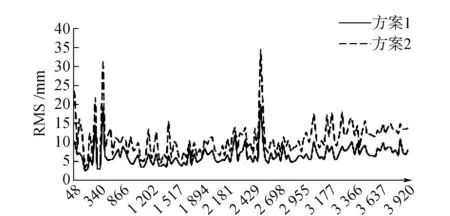
图3 不同方案解算的基线长度精度
从图3可以看出,方案1的基线长度精度明显不如方案2,即BDS单系统计算的精度略不如GPS单系统,但变化趋势一致,在明显的4处突变区域,都有较大反应;随着基线长度的增加,2方案的RMS值相差越大,说明,随着基线越来越来长,BDS的解算结果跟GPS结果差距加大;两种方案的长基线相对误差达到10-9,说明,即使BDS的基线长度解算精度不如GPS,但是也满足高精度要求的使用。
为了更加详细的分析解算单BDS和单GPS系统的数据结果,将基线的N,E,U方向做相对比较,且加上基线长的影响因子,以基线长为横轴,单方向中误差为纵轴,两方案在3方向的结果见图4。
从图4可以看出,方案1的3方向的基线精度均不如方案2,但随着测站距离的增加,方案1和2的精度变化趋势一致;N方向上,BDS系统数据解算质量不如GPS系统,中误差趋于一致,数值均值变化2 mm,BDS基线在南北方向精度6 mm,而单GPS系统较单BDS系统N方向中误差降低30%,且差值大的部分在基线较长的部分;E方向上,2种方案的精度差距较N方向精度差距明显,且不管基线长度,单BDS系统基线东西方向精度的结果均比单GPS系统中误差大4~6 mm,结果为10~12 mm,均值也是差5.1 mm,GPS的解算中误差较BDS系统降低42%,随着测站距离增加,BDS数据基线的突变也较多;U方向上,两种方案的精度都不是很好,这符合一贯的研究成果,高程方向的精度不如水平方向, 跟地壳的构造形变等因素有关[15],此次结果中,GPS的U方向较BDS精度高,
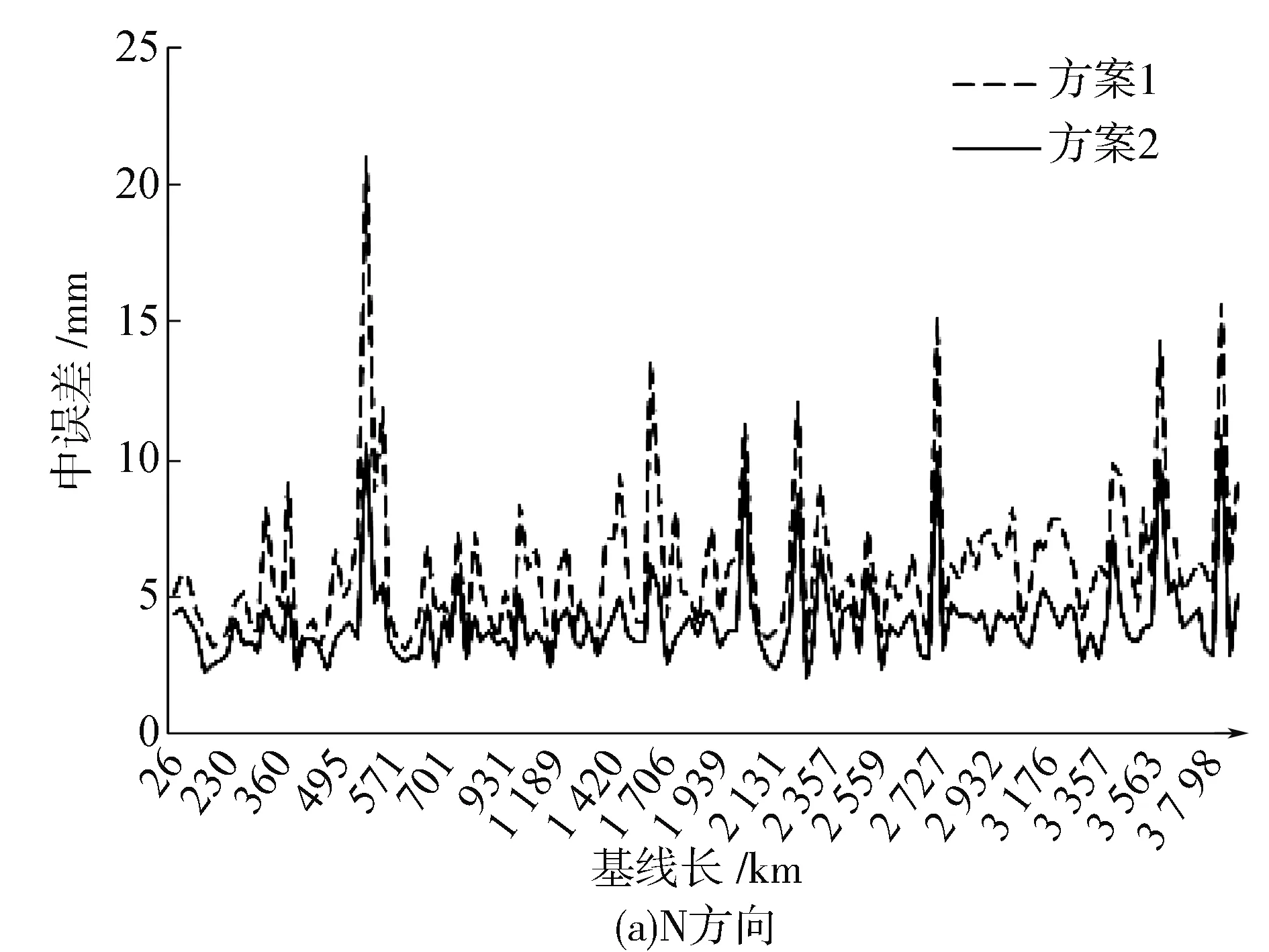
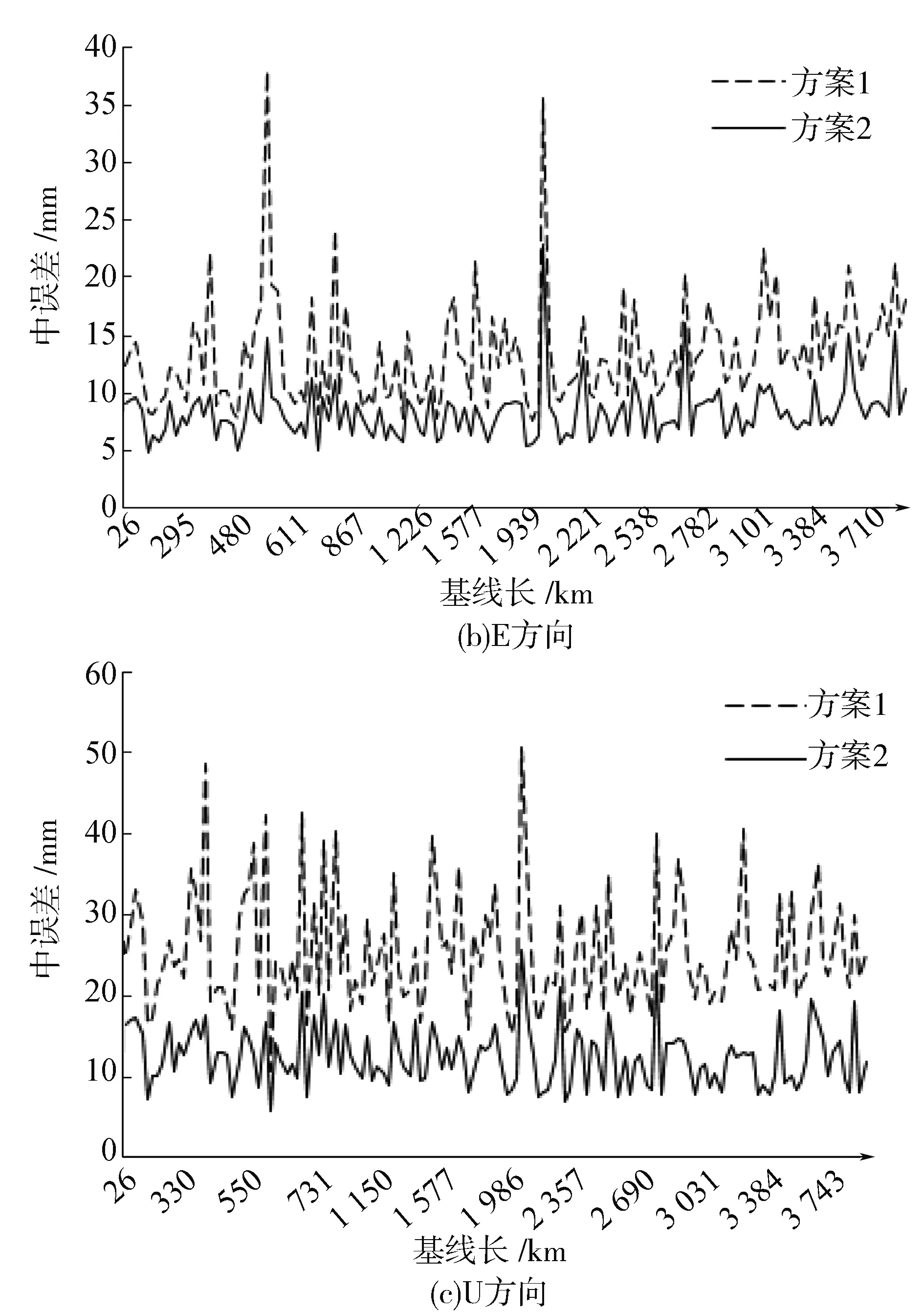
图4 基线单方向精度统计
且基线长度增加,并未给GPS数据解算带来较多突变,而BDS的中误差突变情况就较多,中误差均值为25 mm,大约是GPS系统中误差均值的2倍,反应目前BDS数据在高程方向精度较差,可能跟目前可观测到的卫星少、数据质量不稳定、改正模型精度不理想、受地壳形变因素干扰较大有关。
2.2 BDS/GPS组合系统基线分析
选取其中图1中所示测站进行BDS/GPS组合基线解算分析,由于GAMIT只能处理单系统数据,故此组合分析采取自行编制的软件进行测试。为避免不同软件之间处理数据出现的可能影响,故分别进行单BDS、单GPS、组合BDS/GPS基线解算试验,并分别从结果中选取其中几条基线解结果进行对比,如表1所示。
从表1可以看出,单BDS系统与单GPS系统的基线精度与图4中相差无几,水平方向精度基本优于1 cm,垂向精度1~2 cm,说明此次编写的程序可信度较好;BDS/GPS组合解算基线的精度较BDS系统有所提升,总体能优于1 cm,特别是高程方向,加入GPS系统后,可见卫星数目增大,有效提升了U方向精度。

表1 单系统与组合系统的基线解精度分析 mm
3 结 论
本文基于GAMIT10.61分别解算单BDS、GPS系统数据,通过对比分析基线解算结果精度,得出以下结论:
1)利用GAMIT解算BDS、GPS基线的NRMS值都较小,均能满足高精度解算的要求,基线的相对精度达到10-9,在工程或科研中,利用GAMIT解算BDS数据,完全可以满足精度需要。
2)BDS数据解算基线的南北方向精度6 mm,与GPS数据解算基线相差无几;BDS系统基线的东西方向精度10~12 mm,较GPS系统数据中误差增加42%,且存在突变情况;BDS系统基线的高程方向精度25 mm,且随着基线长度的增加,中误差存在较多突变发生,而GPS基线高程精度约为13 mm,存在较大差异。
3)组合BDS/GPS系统的基线解,提升单BDS系统的精度,特别在高程方向,精度优化1 cm左右。
4)由于GAMIT软件此前一直仅支持解算GPS数据,所以在新版本中可能对BDS数据解算时,加入的模型或卫星信息不是完全如GPS系统的精确,造成基线水平方向、高程方向的差异,而国内一些高校和研究院所自行编制的解算BDS数据的软件,能达到更好地解算精度,如何提高利用GAMIT解算BDS数据也是未来值得探讨的课题。
猜你喜欢
小哥白尼(神奇星球)(2022年3期)2022-06-06
科学(2020年5期)2020-11-26
当代陕西(2019年18期)2019-10-17
中国惯性技术学报(2019年3期)2019-10-15
军事文摘(2018年24期)2018-12-26
中国化妆品(2017年12期)2017-06-27
舰船电子对抗(2016年5期)2016-12-13
太空探索(2016年12期)2016-07-18
太空探索(2016年3期)2016-07-12
太空探索(2016年7期)2016-07-10