
倾向性评分匹配达芬奇机器人与腹腔镜直肠癌低位前切除术的近期疗效比较
2019-05-24 00:54:18卓凡李太原孙焕奎温祥琼胡家平
实用医学杂志 2019年9期
卓凡 李太原 孙焕奎 温祥琼 胡家平
南昌大学第一附属医院普外科(南昌330000)
大量的研究表明[1-3],腹腔镜直肠癌根治术的肿瘤学效果和安全性已得到广泛认同。相比传统的开腹直肠手术,腹腔镜手术具有不差于开腹手术的长期肿瘤学结局[4-6],但在盆腔的狭小区域操作仍有难度。机器人直肠手术凭借镜头稳定、高清晰度、灵活的操作器械、困难区域操作等优势突破了腹腔镜直肠手术的限制,使得达芬奇机器人手术系统在结直肠外科中的应用不断增多。本研究采用倾向性评分匹配法,比较机器人与腹腔镜直肠癌低位前切除术的近期疗效。
1 对象与方法
1.1 研究对象采用回顾性队列研究方法。2015年1月至2016年6月南昌大学第一附属医院对180 例直肠癌患者行低位前切除术。所有患者满足以下条件:(1)经病理学检查明确诊断为直肠癌;(2)肿瘤下缘距肛缘3 ~15 cm;(3)术前通过腹部CT、盆腔MRI 等影像学检查未发现肝、肺等远处转移;(4)术前结肠镜、CT 和盆腔MRI 证实肿瘤未侵犯肛管直肠环;(5)临床病理资料完整;(6)手术方式的选择获患者知情同意。
通过SPSS 软件采用倾向性评分法,依据患者性别、年龄、美国麻醉医师协会分级评分(ASA 评分)、病理T 分期、病理N 分期及肿瘤分化程度,对行机器人直肠癌低位前切除术(机器人组)和行腹腔镜直肠癌低位前切除术(腹腔镜组)的患者进行1∶1 匹配,最终机器人组和腹腔镜组各54 例患者纳入本研究。两组患者基线资料具有可比性。见表1。
1.2 手术方法(1)达芬奇机器人手术采用四孔法布局:脐偏上偏右3 cm 处为观察孔,观察孔偏右下不少于8 cm 处放置8 mm Trocar 连接第Ⅰ机械臂;脐与左侧髂前上棘连线中外1/3 处,放置8 mm Trocar 连接第Ⅱ机械臂;观察孔偏左上8 cm处放置12 mm Trocar 孔为助手孔,用于助手冲洗、牵拉、吸引、结扎等辅助操作[7]。Ⅱ臂提起直肠向左向头侧牵拉,Ⅰ臂用超声刀在骶骨岬水平切开腹膜,进入Toldt 间隙,向上游离至肠系膜下动脉根部,注意深面的左侧输尿管及其外侧生殖血管,先后于根部Hemo-lock 夹闭并切断动、静脉,清扫周围直肠与淋巴组织,再向下方游离骶前间隙至直肠的预切除平面,在分离过程中应保持盆筋膜脏层完整,注意保护腹下神经丛和盆神经丛。直肠远端的离断由助手从12 mm 辅助孔插入切割闭合器完成。左下腹取一小切口,距肿瘤近端10 ~15 cm 切断乙状结肠,将吻合器的抵钉座放入近端结肠。关闭腹腔切口,再次建立气腹,机器人手术系统直视下完成吻合。见图1。
(2)腹腔镜直肠癌根治术:严格按照《腹腔镜结直肠癌根治手术操作指南(2018 版)》操作[8]。
1.3 观察指标(1)手术情况:手术时间、术中出血量、中转开腹、淋巴结清扫数目、远切缘阳性例数、环周切缘阳性例数。(2)术后恢复情况及术后并发症:术后进食流质时间、术后住院时间、术后并发症发生情况。
1.4 统计学方法采用SPSS 22.0 统计学软件进行倾向性评分匹配与数据分析。选用最近邻匹配法进行1∶1 匹配。定量资料用± s 表示,组间比较采用t 检验;无序分类资料组间比较采用χ2检验或Fisher 精确概率检验,有序分类资料组间比较采用Wilcoxon 秩和检验。以P<0.05 为差异有统计学意义。
2 结果
2.1 两组组手术情况比较机器人组和腹腔镜组患者手术时间、中转开腹率、淋巴结清扫数目、环周切缘阳性数、术后进食流质时间、术后住院时间比较,差异均无统计学意义(P>0.05)。与腹腔镜组相比,机器人组术中出血量更少,差异有统计学意义(P <0.05)。见表2。
2.2 两组术后恢复情况与并发症比较机器人组和腹腔镜组总并发症的发生率分别为11.1%(6/54)和14.8%(8/54),差异无统计学意义(P >0.05);机器人组与腹腔镜组相比,两组吻合口瘘和肠梗阻等其他并发症和严重程度的差异均无统计学意义。见表3。
3 讨论
在中或低位腹腔镜直肠癌治疗中,对狭窄的盆腔进行直肠系膜细致而精确的解剖,需要一系列复杂的操作,这不仅依赖于操作者高水平的经验,而且需要助手充分暴露视野,以及扶镜手提供稳定视野,导致腹腔镜手术技术难度大,学习曲线长[11]。除此以外,腹腔镜器械在盆腔等狭小空间操作灵活度较低,一定程度上限制了外科医师的操作。达芬奇手术系统具有消除震颤的精细运动的机器臂,灵巧的移动缩放功能以及提供高清稳定的3D 视野,在手术领域狭窄和有限时,这些优势可能更有益。我们通过运用倾向性评分匹配的方法比较机器人与腹腔镜直肠癌前切除术的近期疗效,倾向性评分匹配研究[12]是一种可以处理非随机化研究数据,有效降低混杂效应,均衡实验组和对照组之间差异的一种有效统计学方法。

表1 腹腔镜组与机器人组一般资料的比较Tab.1 Comparison of cohort characteristics data between the laparoscopic group and the robotic group
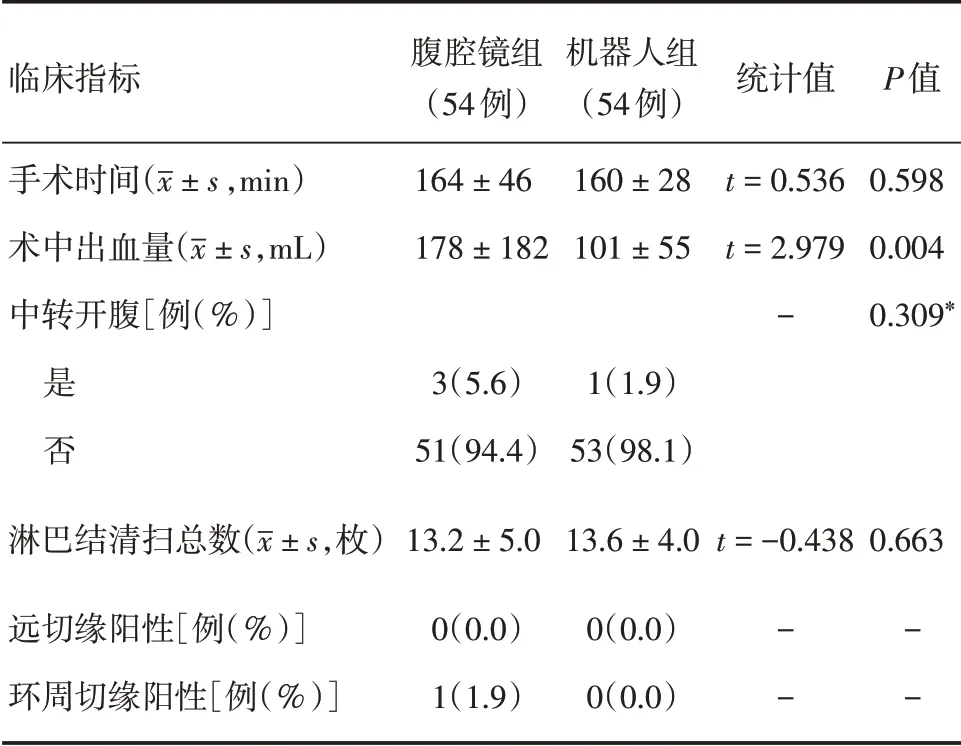
表2 腹腔镜组与机器人组手术情况比较Tab.2 Comparison of condiction of surgery between the laparoscopic group and the robotic group
在本研究中,机器人组与腹腔镜组直肠癌患者的并发症发生率分别为11.1%和14.8%(P=0.950),低于YAMAGUCHI 等[13]和DEBAKEY 等[14]的 研 究报道,但肠梗阻发生率机器人组(1.9%)高于腹腔镜组(0.0),吻合口瘘发生率两组相同(5.6%)。在术后恢复方面,笔者发现尽管机器人组的术后进食流质时间、术后住院时间较短,但与腹腔镜组的差异没有明显的统计学意义,这与既往的分析研究一致[15-16]。笔者认为机器人组患者术后相对较快的恢复得益于机器人手术系统优良的微创效果,对腹腔脏器较小的干扰。本研究中,机器人组1 例发生中转开腹,而腹腔镜组有3 例中转开腹,腹腔镜组中转开腹的原因为盆腔侧壁大出血、盆腔狭窄严重。HUANG 等[17]的荟萃分析结果显示,机器人直肠癌手术中转开腹率低于腹腔镜手术。机器人系统的技术优势之一是能够在狭窄的手术区域进行精细解剖,笔者认为这种技术优势可能会影响这些结果。

表3 腹腔镜组与机器人组术后恢复情况与并发症比较Tab.3 Comparison of Post-operative clinical and pathological outcomes between the laparoscopic group and the robotic group
长期以来手术时间被认为是机器人手术的一个潜在缺陷。既往的研究认为机器人手术建立trocar、机械臂与trocar 对接过程复杂,耗费时间较长,与腹腔镜组相比,机器人组的运行时间更高,因而延长了手术时间,增加了患者的创伤应激。然而笔者发现固定团队经过训练机器人系统对接的熟练度,对接时间可缩短至10 min,并且随着机器人手术技巧的成熟,真正达芬奇镜下操作时间目前已控制在60 min 左右。本次研究中,虽然机器人组手术时间(160±28)min 稍短于腹腔镜组手术时间(164 ± 46)min,但两组差异无统计学意义。术中出血量方面,本研究中机器人组术中出血量较腹腔镜组明显减少,这可能与机器人系统的放大倍数高,稳定的镜头和精准的操作等技术优势相关,极少在分离过程中误伤分支血管,从而减少手术失血量。而在狭窄的盆腔进行操作,这种技术优势可能会更加明显。由于盆腔狭小,超声刀产生的烟雾无法及时散发,干扰镜头,导致视野不清晰,延长手术进程。达芬奇机器人的高分辨率三维(3D)镜头,可以从离操作部位更远的距离和更侧方的角度观察,很大程度避免了视野不清晰、反复擦拭镜头的问题,能够保证手术进程流畅地进行。盆腔淋巴结清扫数目和环周切缘情况是评价手术是否达到根治的重要指标。本研究中机器人组与腹腔镜组患者在淋巴结清扫数目、环周切缘阳性例数、远切缘阳性例数比较,差异无统计学意义,表明机器人直肠癌手术与腹腔镜手术具有相同的根治效果。ASELMANN 等[18]的研究表明,机器人组术后病理标本的直肠系膜完整性优于腹腔镜组。达芬奇机器人手术视频系统提供的高清三维立体图像,呈现更加真实的术野和盆腔组织层次关系,能够清晰地辨认脏层腹膜与壁层腹膜之间的间隙,有利于直肠系膜的完整切除和盆腔淋巴结的清扫,最大程度地保障了肿瘤的根治性。
综上所述,机器人直肠癌前切除术安全可行,较腹腔镜手术具有创伤小、手术出血少、肠功能恢复快等优点,可达到腹腔镜手术相似的近期肿瘤学疗效。本研究为单中心临床研究,病例数量有限,要明确机器人手术系统在直肠切除手术中的优势与不足,仍需今后更多的研究与报道。
猜你喜欢
中老年保健(2021年11期)2021-08-22 03:13:36
中国生殖健康(2019年3期)2019-02-01 06:12:10
作文周刊·小学二年级版(2017年6期)2017-07-12 22:35:55
中国卫生(2016年6期)2016-11-23 01:09:12
腹腔镜外科杂志(2016年12期)2016-06-01 12:10:09
中国卫生标准管理(2015年7期)2016-01-15 03:58:38
中国卫生标准管理(2015年15期)2016-01-15 02:58:43
新疆医科大学学报(2015年10期)2015-12-26 12:33:32
西南军医(2015年2期)2015-01-22 09:09:25
中国中医药现代远程教育(2014年13期)2014-03-01 04:26:33
