
农业四旋翼飞行器的研究
2019-05-24 09:48苏晓光姜重然于莉莉贾婧媛罗治佳
农机化研究 2019年7期
苏晓光,姜重然,于莉莉,贾婧媛,罗治佳
(佳木斯大学 信息电子技术学院,黑龙江 佳木斯 154007)
0 引言
我国东北地区是主要的产粮区,主要生产水稻、玉米、大豆,且大多采用传统的耕作体系,为实现水稻、玉米、大豆等的高产,解决人们的温饱做出了贡献。同时,也带来了许多问题,如忽视资源浪费与环境保护、作业环节多、生产成本高及地力持续下降等严重问题。
近年来,东北地区粮食作物受到病虫害严重影响,相对于水稻而言,要想优质高产,就要想办法降低或者规避水稻病虫害的发生。东北地区作为我国重要的产粮区,为了保证东北地区水稻的优质高产,就需要重视对水稻病虫害的防治[1]。一般来说,农药喷洒一般由人工完成,但这种方式会导致人通过空气接触到气化的农药,不利于人的身体健康,且需要耗费大量的人力物力。
四旋翼飞行器是近年来发展较快、在很多领域都有应用的一种新技术装备。四旋翼飞行器是一种结构新颖、性能卓越、能够实现垂直起降的无人机。在农业生产中使用农用无人机进行农药喷洒有以下优点:①可以监控农作物病虫害病情,飞行高度低,指定喷洒,喷洒效率高,维修成本低;②在匀速飞行时,旋翼产生的风力会将农药进一步的雾化,且更均匀地喷洒到农作物上,最高效率地发挥农药作用[2]。
1 设计原理及机构
1.1 四旋翼飞行器的力学原理
四旋翼飞行器按照机头方向通常又分为“X”模式和“十”模式,如图1所示。按照机头方向,1只旋翼在前,整机呈十字形,则为“十”模式;2只旋翼在前,整机呈X形,则为X模式。因“X”模式力学模型相对复杂,但稳定性及可操控性更好,所以后续内容皆围绕“X”模式进行讨论。
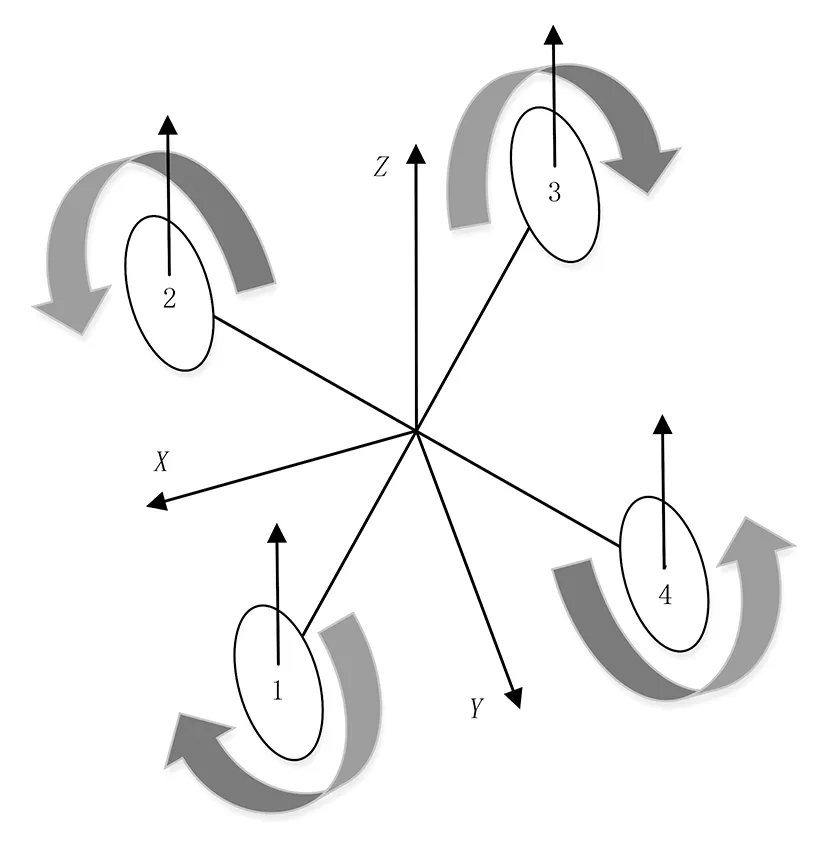
图1 飞行器力学模型Fig.1 The mechanical model of aircraft
图1中:1号电机和3号电机带动正向螺旋桨沿逆时针旋转的同时,2号电机和4号电机带反浆顺时针旋转,在抵消陀螺效应和空气扭力的同时保证4只旋翼都是向上推动飞行器,抵消重力作用。四旋翼飞行器在具有6个自由度,分别沿X、Y、Z坐标轴做平移和绕坐标轴做旋转运动[3]。与单个旋转轴提供升力的直升机相比,四旋翼飞行器能够完成的姿态较少,但基本的前进、后退、平移和旋转等动作都能实现[4]。
1.1.1 垂直运动
图1中:因2个电机正转,2个电机反转,可抵消自身扭力的作用,所以同时提高4只电机的输出功率,就可实现飞行器沿Z轴的垂直上升运动;反之,同时降低4只电机的转速,就可实现飞行器的垂直下降。若排除外界的干扰,旋翼产生的升力等于飞行器自重时,就可实现稳定悬停[5]。
1.1.2 水平运动
图1中:降低1号、2号电机的转速,提升3号、4号电机的转速,就可实现“低头”,由于机体角度改变,旋翼产生了沿X轴正向的分力,则可实现飞行器的前进运动;相反,1号、2号电机转速提高,3号、4号电机转速减少,实现“抬头”,完成后退动作。为了不因转速改变导致飞行器扭矩和升力的改变,前后两组电机的转速改变量应相同。
1.2 控制系统设计方案
1.2.1 系统结构方案
四旋翼飞行器结构框图,如图2所示。四旋翼无人机的结构比较复杂,需要控制横滚角、俯仰角和航向角,以及利用精度高的姿态传感器采集准确的数据。遥控器的控制信号通常通过无线的形式发给单片机。运动的控制主要是控制4个电机的转速,控制电机的信号一般采用单片机产生PWM波,然后输出给电子调速器。由于软件需求,在硬件系统设计时需要充分考虑CPU的数据处理精度和浮点运算能力、传感器选型,以及各类芯片级联电平的匹配等问题。例如,微处理器采用STM32F407ZET6,姿态传感器使用MPU6500模组,电子罗盘采用HMC5843模组,气压传感器采用MS5611模组。在无线通讯时,直接采用PPM(Pulse Position Modulation)方式对控制系统进行信号的控制。为了更好地控制无人机的上升下降,还需采用超声波模块,结合气压计测量无人机的高度。硬件系统结构设计如图3所示。无人机加速时,旋翼电机瞬间产生较大的电流,且无人机姿势实时变化,其控制电流也随之变化,随之会产生电磁干扰,造成通讯控制信号错乱,如图4所示。为了防止旋翼电机在姿态急剧变化时,反向电压通过电子调速器反馈到微处理器,可能造成电压瞬间过大烧毁微处理器,所以需要加接隔离电路。

图2 系统组成框图Fig.2 The system block diagram

图3 硬件系统结构图Fig.3 The stricter diagram of hardware
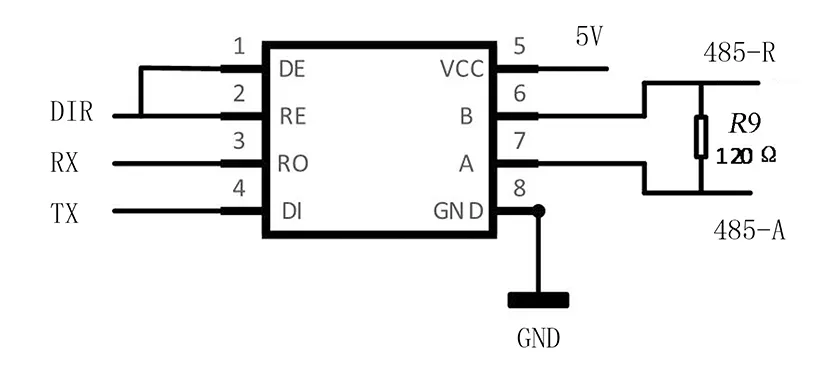
图4 电平转换电路Fig.4 The level switching circuit
同时,要单片机输出的PWM信号输出到电机上,需加上隔离电路用来保护单片机,如图5所示。
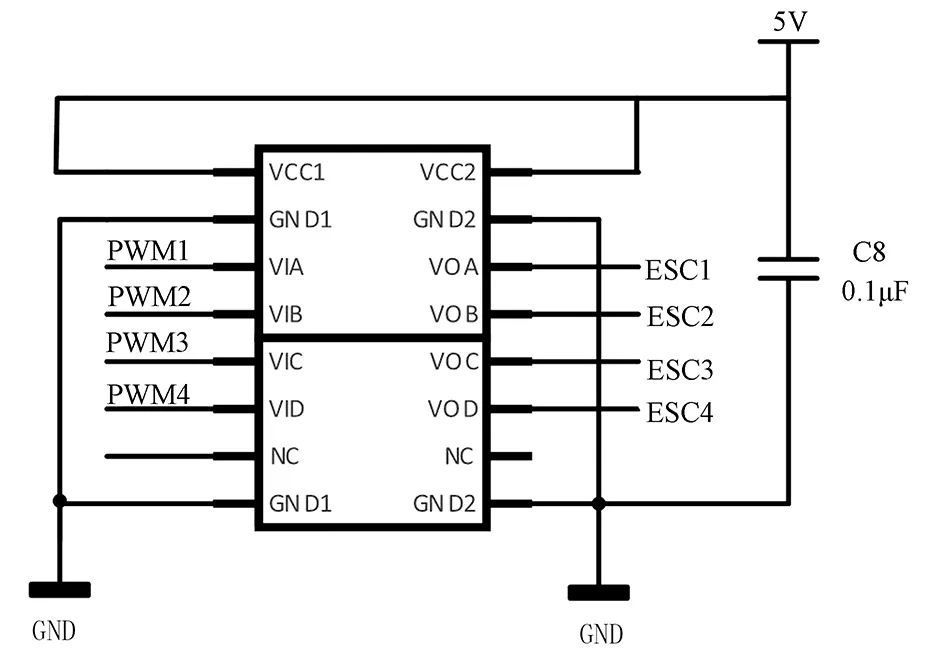
图5 隔离电路Fig.5 The buffer circuit
1.2.2 软件设计方案
软件程序设计,必须满足无人机喷洒所需要的各种控制要求,主要包含3个部分:首先,需要确定遥控器与无人机之间的联系,尤其是当遥控器失控后无人机做出的保护,如果通讯异常失联,其中断检测会触发,无人机会根据电量判断是直接降落还是返航;其次,获取遥控器的控制信号,及时响应控制命令,并进行一定的平滑处理以防止摇杆异常拨动;最后,初始化开机后的各模块,并对传感器进行自检及无人机环境情况进行检测,自检完成后会捕获控制信号,通过平滑处理控制信号,将控制信号输入到PID控制器,再转换成相应的PWM脉宽输出到电机,从而控制无人机完成动作。其程序流程如图6所示。
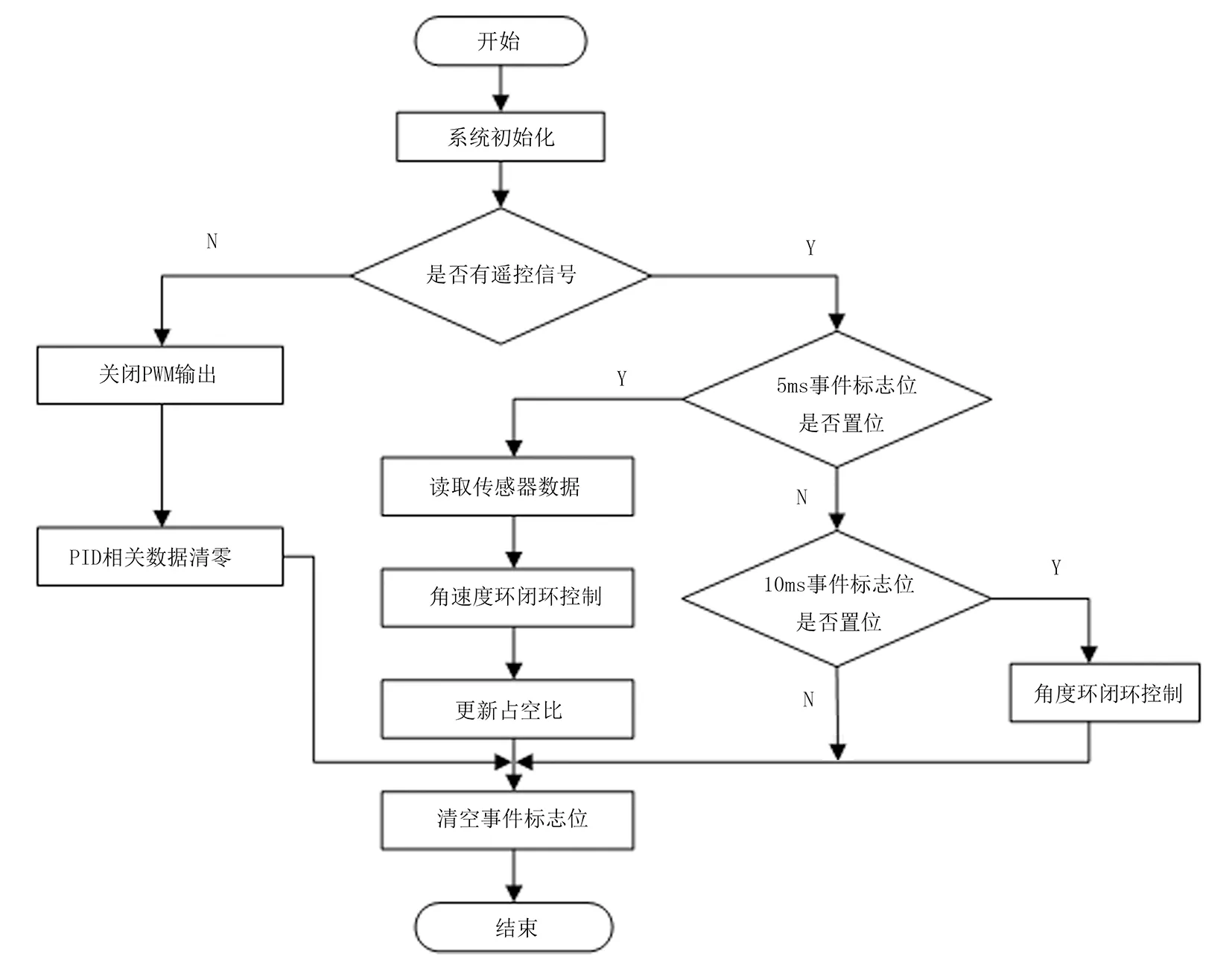
图6 程序流程图Fig.6 The program flowchart
1.3 机体设计方案
农用无人机不仅需要安全飞行还需要载重能力,据此选择合适的电机、电调与桨叶。通过计算电机推力及所需的起飞质量,为安全起见电机推力大于起飞质量两倍。无人机除了正常起飞还需要完成农药喷洒等相关动作,即前进、后退、偏航等运动,在电池耗电电压下降的情况下也需要保证电机的响应能力和安全边界。无人机由于需要搭载药箱,所以在计算整机质量时要加上药箱装满药和无人机本身的质量。因此,选择TYI5008 KV400电机作为动力,电机配合2260碳纤维桨时的参数如表1所示。电机的工作电流为30~40A,为了增加安全边界,采用好赢天行者50A电调驱动,单个电机最大功率为960W,最大拉力可达4 200g。因此,该四旋翼无人机最大起飞质量能达到16.8kg。为了保证无人机的安全飞行以及喷洒动作的完成,当无人机药箱满载时,且电机输出占空比为85%时,电池输出电流总体应小于80A。当电机输出电流为16 A、无人机在搭载满农药的情况下,无人机的整体质量在12.0kg左右。
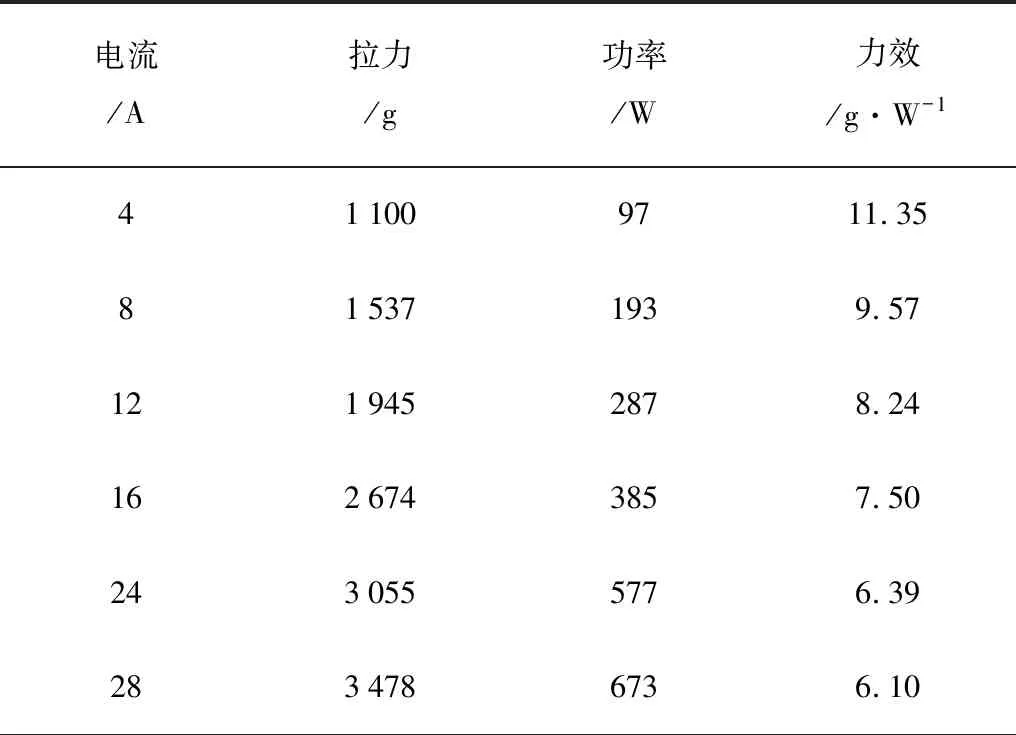
表1 电机参数Table 1 Electric machine parameter
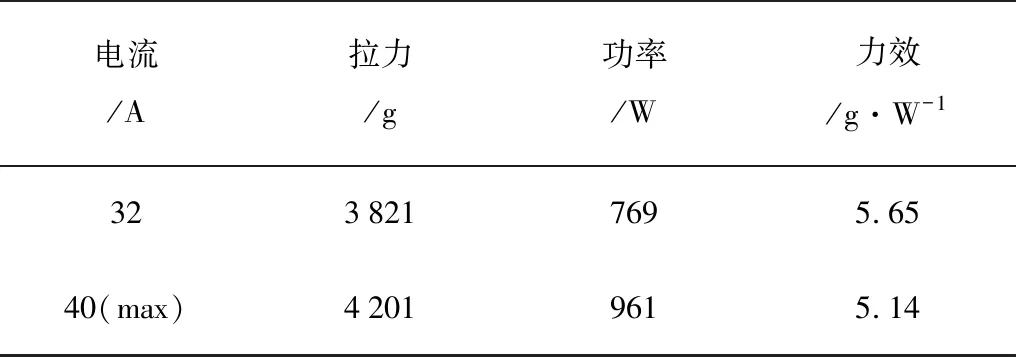
续表1
2 PID控制参数计算
假设在理想状态下,飞行器的构造是严格对称的,且每个电机和旋翼也完全相同,通电之后电机就会带动旋翼旋转,因每个旋翼的转速是相同的,飞行器可以保持平衡状态。但这种假设条件是不存在的,且实际飞行中还会受气流等外界因素影响,为了使飞行器平衡就需要引入一种负反馈控制算法,实时地对每个电机转速进行调节,纠正姿态偏差。本系统选用了构造简单、控制效果好且运算量小PID算法对姿态进行调节,并采用内环角速度外环角度的双闭环形式,其控制算法框图如图7所示。对角度的微分其意义就等同于角速度,又由于角速度闭环控制的存在,所以就省去了角度环控制的微分环节。PID控制算法标准形式见式(1),为了方便计算机处理可变为离散化式(2)。式(2)中,e(k)为系统偏差,在本系统中为期望值与反馈值的差;u(t)是系统输出,系统外环的输出为角速度的期望值,它与角速度反馈的差就是角速度环的输入;KP,KI,KD分别称作比例、积分、微分参数,需根据具体系统特点进行调节,使系统稳定[10]。
(1)
(2)
由于积分在实际意义上是连续的,但单片机是数字系统,不能实现连续的积分,只能以累加的形式代替积分,微分用前后两次输入的差进行代替,在实际应用中也取得了良好的效果。飞行器的横滚、俯仰及航向3个维度都需使用PID算法进行控制,将3个环节的输出分别累加到对应电机,实现飞行器的姿态稳定可控。使用PID算法对系统进行姿态控制,但PID控制算法往往需根据系统特性选择恰当的参数使系统达到更稳定的状态,合适的参数才能保证飞行器起飞后姿态的稳定[11]。

图7 控制算法框图Fig.7 The contral algorihm block diagram
因此,需要对飞行器的横滚角、俯仰角及航向角进行参数调试,在调试过程中应保证飞行器在当前要调试的维度上能够自由活动,在其他维度应固定,以免对调试造成影响。在实际调试时,首先对飞行器进行固定,若要对横滚角PID控制参数进行调试,应使飞行器能够沿横滚角自由转动,能够最大化地较少外界影响,以保证调试的参数结果可靠、稳定。在实际参数整定中,应结合参数的实际物理意义进行整定。本系统使用外环角度、内环角速度的双闭环PID形式。其意义为:当真实的飞行器姿态和期望的飞行器姿态之间发生了角度偏差,不立即对飞行器进行姿态调整,而是先计算出应以什么样的角速度对飞行器姿态进行调整,并将其输出,作为内环角速度控制器的输入,纠正姿态偏差,从而保证飞行器姿态稳定可控。根据内外环的意义分析,应先保证角速度环的稳定,才能实现角度环的功能,所以应按照先内环,再外环的顺序进行调试[12]。
由图2控制系统框图可知:角速度环分为比例、积分和微分3个环节。其中,比例环节对应式(2)中KPe(k),易知比例环节输出和输入误差大小成线性关系,即误差越大输出越大,所以比例环节在PID控制器中是主回复力,确定了KP参数,才能对其他参数进行调节。由比例环节表达式可知:当输入误差一定时,KP参数若偏小,输出偏小,达不到控制效果;若KP参数偏大,会使比例环节输出偏大,造成超调使系统不稳定。所以,在调试过程中按照此分析结果进行调试,在调试中发现当角速度环KP值为3.8时飞行器角速度有良好的响应。但根据KPe(k)得到:当KP参数一定输入误差e(k)较小时,比例环节输出也偏小,甚至不能修正误差。所以只有KP参数的系统仍存在较小的误差。
3 飞行测试
由于四旋翼飞行器有6个运动自由度,但只有4个控制自由度,是典型的非线性欠驱动系统。所以,在实际飞行时要求飞行器在平面平移时相应超调小、波动小、漂移小;姿态角度应无超调、调节时间短,能够快速稳定。为了保证飞行器性能稳定可靠,需要对飞行器分别进行室内、室外飞行稳定性测试。飞行器通电后,姿态会稳定在水平0°位置,拨动遥控器摇杆,飞行器姿态跟随摇杆变化,给飞行器施加干扰,能感觉到飞行器对干扰的排斥,飞行器姿态能够迅速回正;在室外微风的环境下,飞行姿态受风力影响较小,在遥控器的操作下能够正常飞行,且仍具有良好的稳定性。图8为实物图。

图8 实物图Fig.8 Picture of real products
4 结论
四旋翼飞行器是一类复杂的多变量欠驱动系统,具有非线性、大时滞、强耦合及时变等特性,在飞行过程中很容易受到各种外部环境的干扰和影响。针对以上不稳定因素,采用MPU-6050作为姿态传感器提供反馈,以角度外环和角速度内环构成的串级PID作为控制算法,最终设计完成的飞行器可以达到稳定飞行的目的。
猜你喜欢
选煤技术(2022年2期)2022-06-06
汽车与驾驶维修(维修版)(2021年10期)2021-11-05
北京航空航天大学学报(2021年9期)2021-11-02
军民两用技术与产品(2021年9期)2021-03-09
电子制作(2019年9期)2019-05-30
中学课程辅导·教师通讯(2018年10期)2018-09-04
北京航空航天大学学报(2017年1期)2017-11-24
中学生数理化·高一版(2017年3期)2017-07-08
北京航空航天大学学报(2016年8期)2016-11-16
火控雷达技术(2016年1期)2016-02-06
