
基于Solidwork的拖拉机耕犁装置的设计与仿真
2019-05-24 09:48黄诗鸿
农机化研究 2019年7期
黄诗鸿
(重庆工业职业技术学院,重庆 401120)
0 引言
犁是农业耕作中常用的土壤耕作机具,是农业生产中不可或缺的生产资料。犁体是耕犁装置的重要工作部件,主要由犁铧和犁壁组成,在工作过程中起到碎土、翻土和推土的作用,其形状、结构、曲面样式等设计制造水平的优劣直接影响到耕地质量的好坏和动力消耗的多少。由于犁片结构是较为复杂的曲面形状,其设计和优化过程也较为复杂,如果采用软件仿真的方法对其结构进行优化,将大大地缩短设计时间,提高设计效率,降低设计成本。SolidWorks软件是一款强大的三维建模软件,且具有零部件的装配功能,本次将SolidWorks软件引入到犁耕装置的设计过程中,以提高其设计质量和效率。
1 犁耕装置及其SolidWorks建模优化
犁耕装置是农业耕种作业过程中最常用的作业工具之一,是农业生产中非常重要的生产资料,而犁片是犁耕装置的重要部件,主要是在作业过程中进行碎土、翻土和推土等操作。犁片结构形状的好坏直接影响耕种质量和动能消耗,这对农作物的生产量、拖拉机的作业效率和燃油消耗等都有重要的影响。最常用的犁耕装置是悬挂式的,其结构如图1所示。

图1 悬挂式犁耕装置Fig.1 The suspended ploughing device
悬挂式犁耕装置的机具质量全部由拖拉机来承担,作业时在拖拉机牵引力的作用下克服土壤阻力向前运动,对土壤进行破碎、翻转和推动。耕犁装置的主要结构如图2所示。

图2 耕犁装置结构示意图Fig.2 The schematic diagram of the structure of ploughing and plow device
犁片是曲面形式,在作业过程中,曲面结构的好坏对作业质量的影响较大。本次采用Solidworks软件对犁片结构进行仿真优化,其流程如图3所示。

图3 耕犁装置建模和装配模拟仿真流程Fig.3 The modeling and assembly simulation process of ploughing device
在进行建模和仿真时首先需要对犁耕装置的具体结构和参数进行分析,然后根据参数数据进行建模,并利用SolidWorks的运动仿真功能对模型进行校验,从而实现模型的优化。
2 曲面建模和装配体仿真技术
对于拖拉机耕犁装置的设计与仿真三维建模最重要,三维建模的难度是耕犁装置的曲面结构;而SolidWorks软件提供了多种曲面的构建方案,可以根据曲面生成实体特征几何体,并支持曲面的修改,如延伸、裁剪、圆角和填充等。曲线是曲面建模的基本框架,曲线的生成是曲面建模最关键的一步。曲线的建立首先要选择基准面,以坐标平面作为基准面,构建的曲线如图4所示。

图4 曲线草图绘制Fig.4 The sketch drawing of curvilinear
在绘制草图之前首先要掌握一些曲线和曲面的构造方法,曲线包括半圆和螺旋线等,曲面的构造包括拉伸、旋转、扫描、放样等方式。拉伸操作如图5所示。

图5 曲面的拉伸示意图Fig.5 The sketch diagram of surface stretching
在曲面拉伸时,首先要选择基准面,这是拉伸方向的基本参考平面,然后设置给定深度,表示拉伸构件的基本宽度和厚度,最后沿着建立的曲线便可以生成曲面结构。
螺旋线的草图绘制如图6所示。如果要建立复杂曲面需要借助于螺旋线,螺旋线的建立需要设置螺旋线的一些基本的参数,如螺旋角等。根据螺旋线旋转曲面的建立如图7所示。
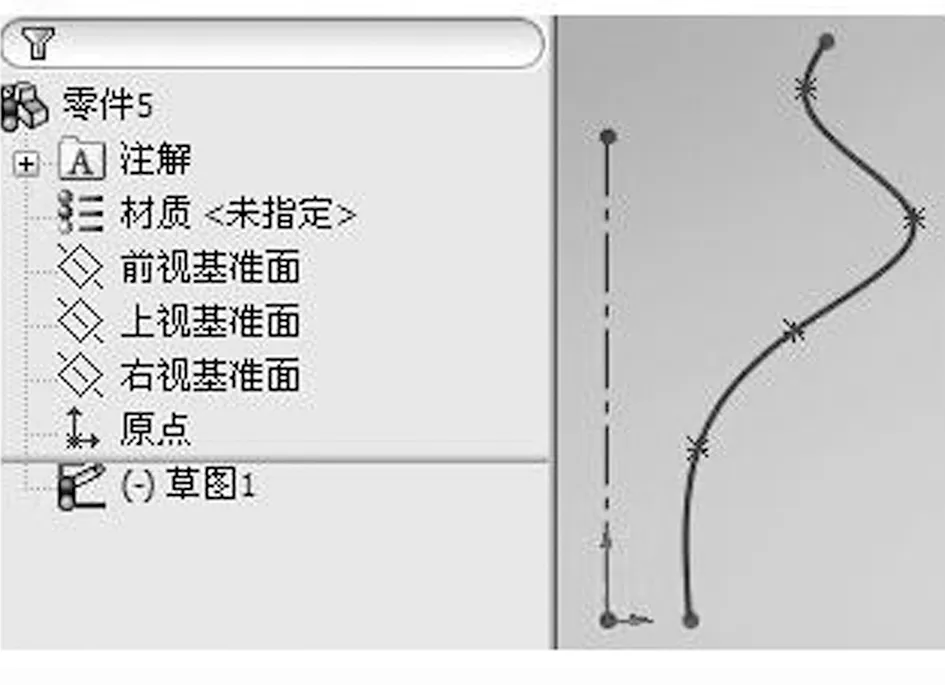
图6 螺旋线草图绘制Fig.6 The sketch diagram of helical line

图7 旋转曲面创建示意图Fig.7 Creating a schematic diagram of revolving surface
在创建旋转曲面时,首先需要设置一条基准线,然后设置相关的厚度和选择方向,利用螺旋线进行旋转建立实体。实体建立完成后可以通过SolidWorks的装配功能对各个构件进行装配,装配界面如图8所示。

图8 装配体设置界面Fig.8 The assembly setting interface
在进行装配体装配时可以选择界面上带有的基准面,也可以自己建立基准面,选择相应的配合方式,便可以将实体零部件进行装配。以皮带传动为例,建立的装配体如图9所示。
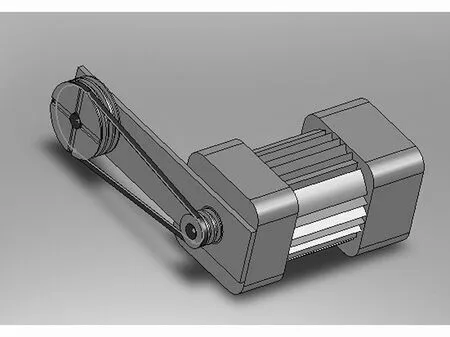
图9 皮带传动装配和仿真Fig.9 The assembly and simulation of belt drive
将皮带和带轮选择一定配合方式便可以实现装置的装配功能,如果要对其运动进行仿真,可以进行相应的运动幅等设置,最后生成运动动画;同理,拖拉机耕犁装置也可以采用这种方式进行仿真。
3 拖拉机耕犁装置建模和仿真
按照第2节的建模方法,采用SolidWorks软件对拖拉机耕犁装置进行了建模和仿真。其中,建模和仿真以30系列悬挂铧式犁为典型参考案例,它可以与标定功率为44.1~73.5kW拖拉机配套作业,结构简单,耕种适应范围广,主要参数如表1所示。

表1 30系列悬挂铧式犁基本仿真参数Table 1 The basic simulation parameters of 30 series of hanging plough
30系列悬挂铧式犁基本仿真参数主要包括单犁体幅宽、总幅宽和耕深等,主要有1L330 和1L430两种。本文主要以1L330 为设计仿真对象,其实物图如图10所示。

图10 1L330型耕犁装置实物图Fig.10 The Physical diagram of 1L330 type ploughing plow device
根据耕犁装置的实物图,利用表1的单犁体幅宽、总幅宽和耕深等参数,建立了犁耕装置的三维模型。为了简化研究,以一片犁为研究对象,其模型如图11所示。
建立好犁片模型后,为了进行运动仿真,可以建立土壤的三维几何模型。本次选用的土壤模型为长方体模型,然后再在SolidWorks软件中进入到运动仿真模块中,选择连接方式和运动副,如图12所示。
设置好相应运动参数后,再进入求解器;当信息显示正常时,便可以进行动画分析,设定好动画时间,点击开始即可。本次主要仿真犁进入到土壤的过程,如图13所示。
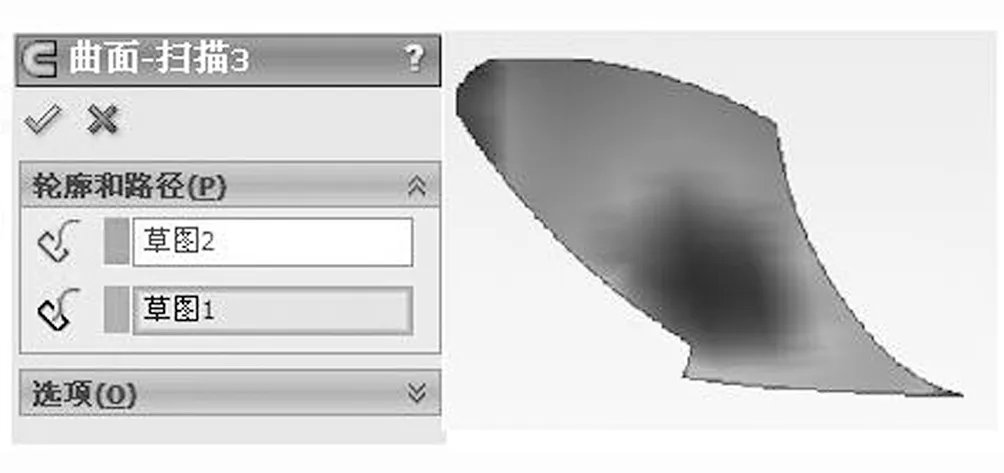
图11 犁片三维模型Fig.11 The three dimensional model of plough
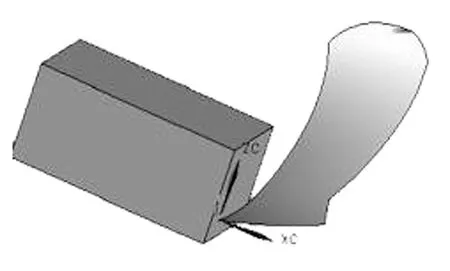
图12 犁片运动仿真模型Fig.12 The simulation model of plow motion

图13 犁运动仿真Fig.13 The simulation of plow motion
犁体工作时,犁铧切断土垡使其沿犁铧和犁胸向上推移,此时土壤受剪切和拉伸作用,应力主要集中在与犁壁接触的拉伸区。
4 结论
耕犁装置的犁片是较为复杂的曲面结构,设计和优化过程较为复杂,因而SolidWorks软件的建模和装配与运动仿真功能引入到了耕犁装置的结构设计优化过程中,有效地提高了设计效率。为了实现耕犁装置的建模,首先对典型的30系列悬挂铧式犁进行了参数和结构分析,根据实际模型参数建立了犁结构和土壤的三维仿真模型,利用动画功能进行了动画设计,得到了犁片结构的作业仿真动画,为犁耕装置的设计提供了较有价值的参考。
猜你喜欢
中学生数理化(高中版.高考理化)(2021年11期)2022-01-18
一重技术(2021年5期)2022-01-18
小学生学习指导(小军迷联盟)(2021年11期)2022-01-18
娃娃乐园·综合智能(2020年9期)2020-09-25
电子技术与软件工程(2020年6期)2020-02-03
智富时代(2019年8期)2019-09-23
智富时代(2019年8期)2019-09-23
创新作文(1-2年级)(2019年2期)2019-08-06
数学大世界(2018年16期)2018-07-30
儿童故事画报(2018年4期)2018-05-21
