
基于理性Agent的管制实验教学设计与资源开发
2019-05-20 11:05孙禾
实验技术与管理 2019年4期
孙 禾
(中国民航大学 空中交通管理学院, 天津 300300)
管制员是空中交通管制工作的决策主体,其自身认知水平与技能水平的优劣,直接影响到整个空中交通的安全水平。但由于管制工作的特殊性,其与航空安全紧密相连,管制人才的培养和训练只能采取理论学习结合模拟仿真的方式。一方面,学生需要学习空中交通管制基本理论,包括管制指挥规则、陆空通话规范等,主要通过课堂教授的方式进行; 另一方面,学生通过虚拟仿真实验,锻炼综合的管制技能,主要通过管制模拟机进行[1-2]。但从目前的教学环境来讲,除了模拟机以外的实验教学资源非常少,理论和实际应用脱节,学生很难将自己置身于一种虚拟的管制环境当中。为了能够建立一种虚拟仿真的实验教学环境,本文基于理性Agent方法建立了管制员认知模型,提出了一种管制实验教学方案,并开发了相关的教学资源。
1 基于理性Agent的管制实验教学框架
1.1 基于理性Agent的管制员认知模型
管制员的工作即是通过对情景意识的加工,以及对管制规则的理解,对空中交通进行管理,以保证飞行的间隔和效率[3-4]。而管制员的认知过程,就是管制员认识外界管制场景和事物的过程,或者说是对作用于管制员的感觉器官的外界管制场景和事物进行信息加工的过程[5-6]。因此可以理解为,管制指挥过程即是管制员认知的集中体现,而在这一过程中因为错、忘、漏等认知差错造成可能的不良后果,统称为认知风险[7-11]。因此可以用理性Agent方法,模拟管制员的认知过程,建立的模型如图1所示。

图1 基于理性Agent的管制员认知模型
理性Agent包括信念(belief)、愿望(desire)和意图(intention),即BDI三个部分[12]。其中,信念代表管制员个体素质、基本知识、认知能力等; 愿望代表管制员需要完成的任务,例如指挥飞机进行冲突解脱、高度层调整、机动绕飞等; 意图代表管制员为了完成任务而需要做的事,即通过陆空通话对飞行员下达相关的管制指令。在模型中,管制员为主体,信念为基础,愿望为目标,他们共同驱使管制员个体完成每一项意图。
1.2 管制实验教学框架设计
在认知模型的基础上,设计了如图2所示的管制实验教学框架。根据“学习—训练—仿真”层层深入的设计思想,学生首先通过理论学习部分,掌握管制员所需的基本素质和能力,巩固管制基础; 之后通过情景练习,掌握在不同指挥任务中,管制员与飞行员常用的陆空通话,了解管制目标; 最后通过模拟的管制场景,将自己置身于雷达屏幕前,指挥飞机完成相应的任务,训练管制行动。若指挥成功,系统还将输出计算得到的量化风险值,来评判此次指挥的优劣程度。
2 实验教学资源开发关键技术
2.1 语音处理
通过软件获得管制员录入的音频信号,之后通过语音处理模块采集相关的时域和频域信息,即通过程序提取出语音信号的时长、振幅等时域特征,之后提取出MEL倒谱系数[13-14]。
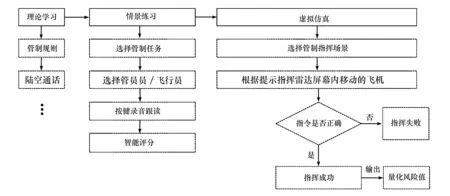
图2 管制实验教学框架
倒谱系数提取步骤为:(1)预加重部分,采用高通滤波器对语音高频的部分进行加强,设输入信号为x(n),输出信号为y(n)=x(n)-ax(n-1),其中a=0.9375; (2)分帧和加窗部分,根据语音的短时平稳特性,设计采样频率为22 050 Hz,每帧长度为23 ms。使用海明窗进行加窗,以减小吉布斯效应; (3)端点检测部分,计算语音信号的短时能量和过零率。分别设置高低2个阀值,使用双门限联合判决的方法来检测语音的端点,进而提取出有效的语音片段; (4)最后在语音段的基础上,进行快速傅里叶变换,将每帧的频谱参数通过一组30个三角形带通滤波器所组成的滤波器,对输出做对数运算,求出其对数能量,再将此30个参数进行离散余弦变换,即可得到MEL倒谱系数(MFCC)。
以字母A为例,读作单词ALPHA,语音信号处理前后的对比如图3所示。
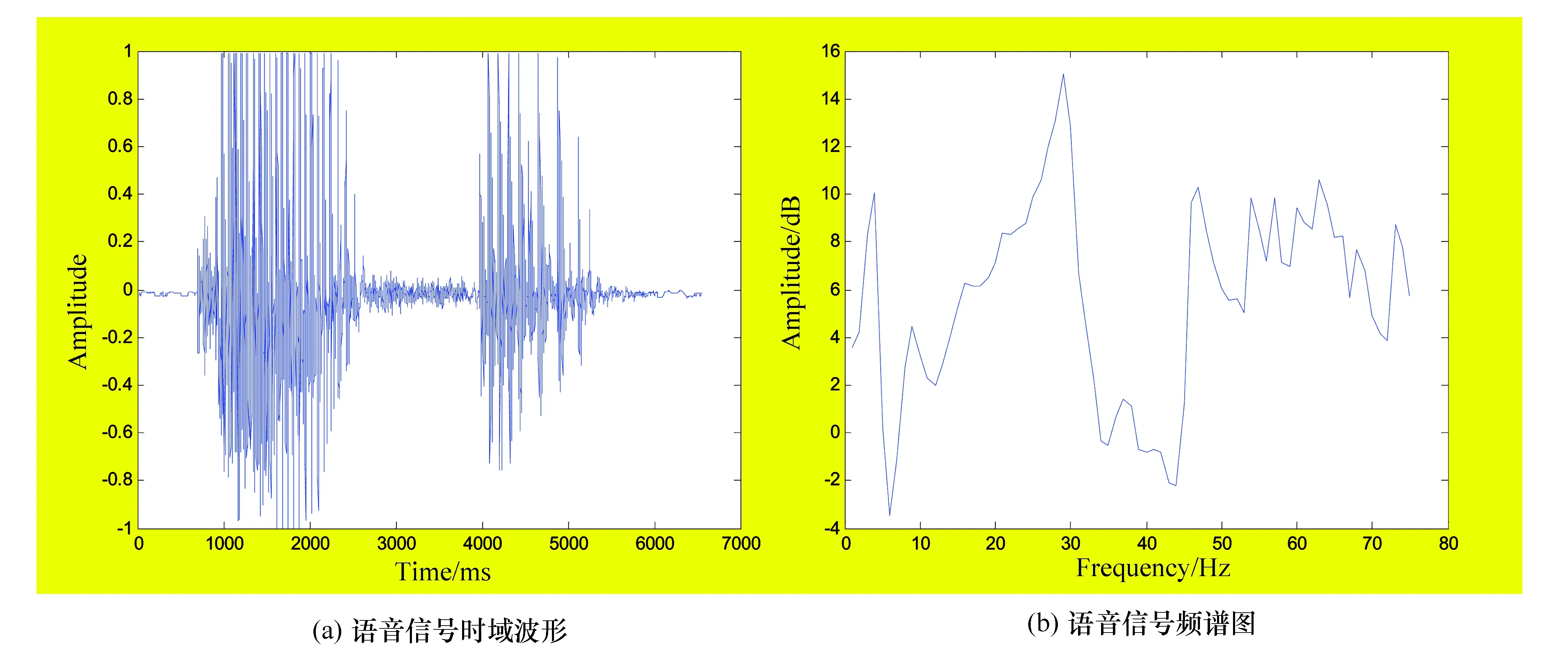
图3 语音信号处理前后对比
2.2 风险分析
2.2.1 语音正确性分析
由于陆空通话英语的用语基本固定,单词和短句的变化很少,适合建立孤立语音模板,因此在语音处理的基础上,本文采用DTW算法(dynamic time warping,动态时间归整)进行语音识别和打分,以评判语音的正确性。
为了比较客观地对语音的标准性进行打分,通过DTW方法得到的结果越大,说明与标准语音模板的差距越大。本文采集了100位管制员的语音,经过统计发现,DTW输出值最大为32,因此本文提出用公式(1)对发音进行评分:
(1)
其中,S为发音标准性评分,SDTW为算法得到的结果,经过处理后,发音最好的一个样本其得分为最高的100分,发音标准性越差,其得分也就越低。
2.2.2 语音准确性分析
采用通话时间和平均振幅的差异性,计算得到语音的准确性情况,如公式(2)、(3)所示:
(2)
(3)
其中,Ti为输入语音时长,Tt为模板标准时长,T为时长差异性评分;Ai为输入语音振幅,At为模板标准振幅,A为振幅差异性评分。这2个数值越大说明与模板越接近,即越符合正常情况。
最后通过加权得到综合风险值R,如公式(4)所示。
R=100-(w1S+w2T+w3A)
(4)
其中,w1、w2、w3为比例权值,根据实验统计,本文给定w1=0.7、w2=0.2、w3=0.1。
3 实验系统开发与测试
为了方便使用,简化实验系统所需的硬件要求,系统采用了Eclipse+Android-Sdk的方式进行开发[15],支持Android 5.1以上的操作系统。本文从管制教材[16]中提取实例,设计了典型的空管指挥场景,并将其中的录音文件制作成标准的语音模板。虚拟仿真部分的测试数据及结果如表1所示,软件系统功能图如图4所示。
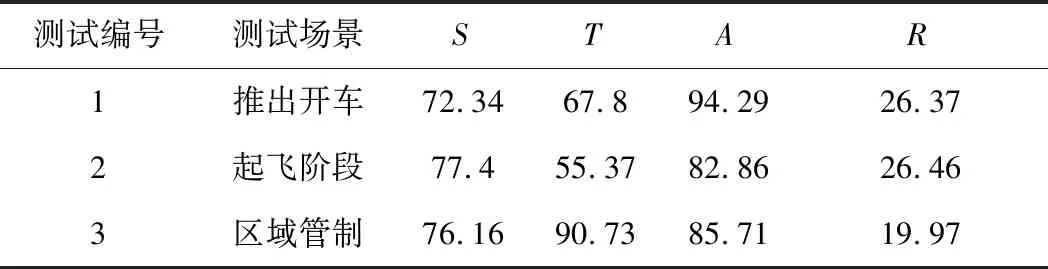
表1 测试数据及结果
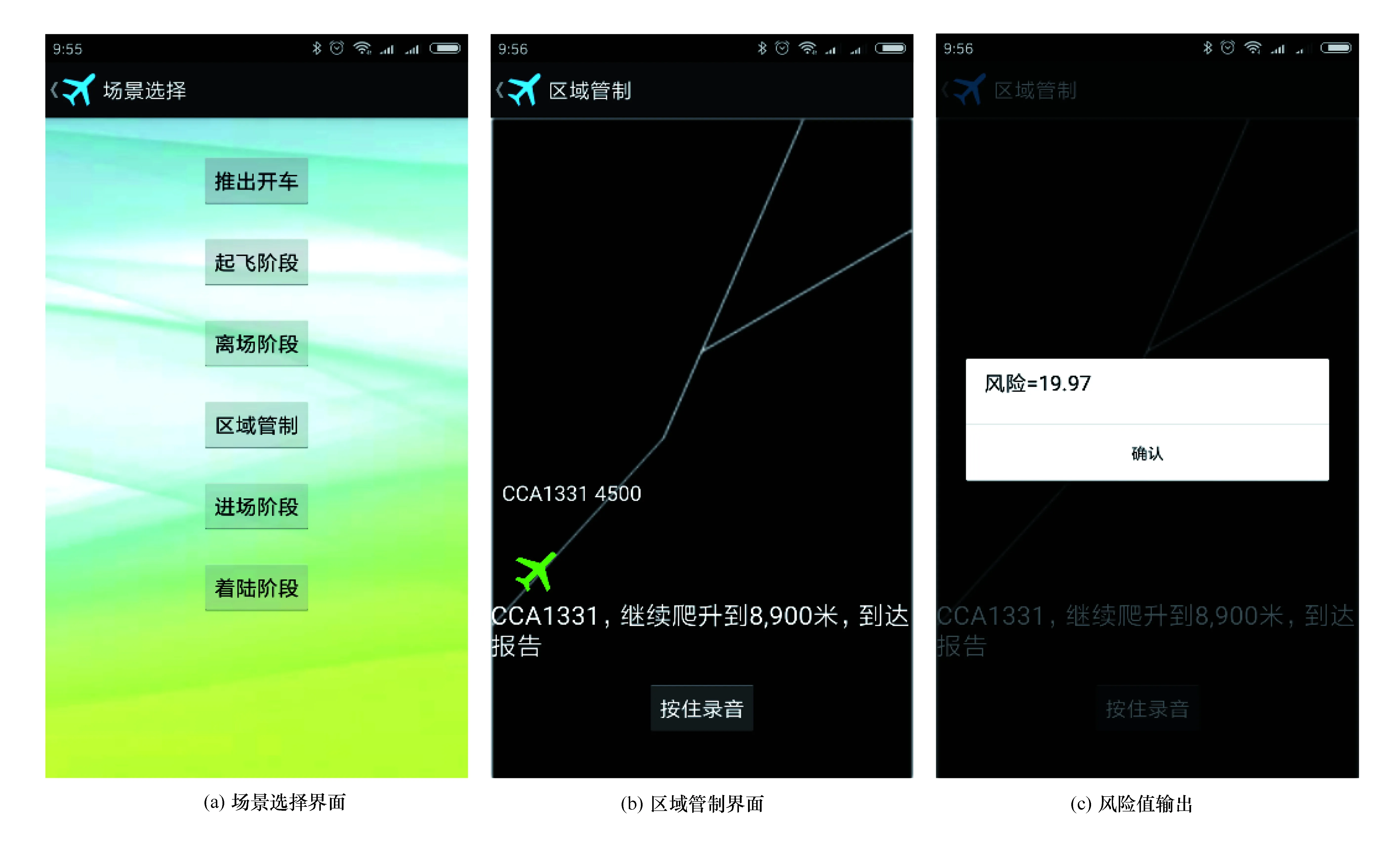
图4 系统功能图
以输出的量化风险值作为参考,可以从一个侧面评价学生的管制能力。系统将管制能力的测试融入到风险水平测量当中,改变了以往管制训练的方式,学生需要使用系统不断学习和训练,实验目的更加明确。同时系统打分相对客观,避免了人为因素的影响。
4 结语
本文针对行业实际需求,提出了一种基于理性Agent方法的管制实验教学设计方案,并通过Android系统进行了实现。系统的应用可以带来如下几方面益处:
(1) 结合理性Agent方法,采用层层深入的设计思路,包含了各类理论基础知识学习及模拟场景训练,可以满足各种水平学生的学习和训练需求。
(2) 在传统的管制训练中,需要一名学生扮演管制员发布管制指令,另一名学生扮演飞行员,配合管制指令对飞机进行操纵。本方法的虚拟仿真阶段,将模拟简单的雷达管制环境,通过语音识别自动改变飞机状态,学生可以独立进行练习,在节约学生时间的同时,效率大大提高。
(3) 系统基于Android环境进行开发,可在手机等智能电子设备上运行,无需耳机、话筒等硬件环境,提供了更加便捷和高效的使用体验,很大程度上突破了教学环境的限制。
猜你喜欢
新商务周刊(2018年15期)2018-12-06
能源(2017年9期)2017-10-18
计算机测量与控制(2017年6期)2017-07-01
航空知识(2017年2期)2017-03-17
中文信息(2016年3期)2016-04-05
IT时代周刊(2015年7期)2015-11-11
中国民航大学学报(2015年3期)2015-03-01
汽车科技(2014年6期)2014-03-11
中共宁波市委党校学报(2014年4期)2014-03-01
中华女子学院学报(2013年1期)2013-03-11
