海洋浮式钻井天车升沉补偿实验教学平台研制
2019-05-20 11:04:18张彦廷刘振东黄鲁蒙刘明宇
实验技术与管理 2019年4期
张彦廷, 刘振东,2, 陈 帅, 王 康, 黄鲁蒙, 刘明宇
(1. 中国石油大学(华东) 机电工程学院, 山东 青岛 266580; 2. 中国石油大学(华东) 石油工业训练中心, 山东 青岛 266580)
深海油气开采依靠浮式钻井装置,海浪的不规则运动使钻井平台产生六自由度运动,升沉补偿装置可以消除波浪升沉运动对钻柱的影响,控制井底钻压稳定在允许范围内,其性能直接影响到海洋石油的开采效率[1]。天车升沉补偿因具有占用甲板面积小、所需液压管线短和钢丝绳寿命不受影响的优点,在浮式钻井船或半潜式钻井平台上得到广泛应用[2-3]。
升沉补偿装置是石油高校机械工程专业的高年级本科生应重点了解的一种海洋石油装备,目前多数学生对升沉补偿装置的认识仅停留在理论层面,缺乏感性认识和实际的动手操作训练[4-8]。为此,研制了一套天车升沉补偿模拟样机并开发了升沉补偿综合实验,使学生对天车升沉补偿装置有一个全面的了解,重点掌握天车升沉补偿装置的工作原理及控制方式,为以后走上工作岗位奠定基础。
1机械系统设计
当浮式钻井平台随海浪做升沉运动时,升沉补偿装置驱动浮动天车上下运动消除平台升沉运动对钻柱的影响,控制游车大钩的绝对位置基本不变,井底钻压稳定在允许范围内[9-11]。
根据相似理论及设计经验[12-13],按照1∶5缩尺研制一套用于实验教学的天车升沉补偿实验平台,图1为天车升沉补偿实验平台机械系统。机械系统主要由升沉液压缸、摇臂装置、天车、游车、负载液压缸、补偿液压缸、钢丝绳和机架组成。其中天车2与游车8之间采用3*2轮系,补偿钢丝绳3长度为恒定值,将系统构件连接成一个整体,通过控制升沉液压缸5活塞杆的伸缩量,改变天车2与游车8之间钢丝绳的长度以改变游车8位置,实现船体升沉模拟运动;补偿液压缸7驱动天车2上下运动,控制游车8的绝对位置基本不变,实现升沉补偿功能[6]。
2 液压系统设计
液压系统主要包括升沉运动液压回路、负载模拟液压回路、升沉补偿液压回路三部分,分别实现升沉运动模拟、钻机负载模拟和升沉补偿的功能(见图2)[14]。
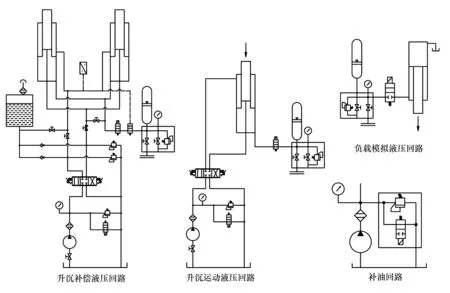
图2 液压系统原理图
在升沉运动液压回路中,升沉液压缸采用复合式液压缸,内缸有杆腔和外缸有杆腔与电磁比例换向阀连通,外缸无杆腔与蓄能器连通,电液比例换向阀与蓄能器共同作用驱动升沉液压缸活塞杆上下运动,模拟钻井平台随海浪的升沉运动,具有易于控制、承载能力强的优点[14]。
负载模拟回路中,负载液压缸倒置安装,有杆腔与蓄能器连通模拟游车负载,调定蓄能器压力即可改变游车负载值,克服了悬挂重物模拟负载的缺陷; 利用蓄能器的弹簧刚度特性可以模拟钻柱刚度与井底钻压变化,与实际钻机负载模型相同。
在升沉补偿液压回路中,补偿液压缸为复合式液压缸,外缸无杆腔与蓄能器相连平衡系统静载,电磁比例换向阀根据升沉位移信号控制外缸有杆腔和内缸有杆腔的压力驱动天车上下运动,控制游车位置基本不变。采用复合式液压缸实现天车半主动式升沉补偿功能,具有结构简单、补偿精度高、能耗低的优点。
半主动式天车升沉补偿实验平台工作原理:当升沉液压缸活塞杆向上运动时,位移传感器将升沉液压缸的运动信息传递给控制系统,控制系统按照既定的控制策略控制升沉补偿回路中电液比例换向阀运动,从而控制补偿液压缸活塞杆带动天车向下运动,两种运动叠加,保证游车的绝对位置不变,实现升沉补偿的功能。
3 电控系统设计
电控系统对天车升沉补偿实验平台具有控制和监测功能[14]。控制功能主要是根据实验装置的工作原理,实现升沉模拟、钻井负载模拟和升沉补偿功能; 监测功能主要是能实时监测、显示实验系统各项参数。
3.1 电控系统方案
天车升沉补偿装置电控系统以西门子PLC和WinCC为基础,传感器将采集到的实时数据传送至PLC,PLC向执行设备发送控制指令,控制系统的运动状态;上位机PC端利用WinCC组态人机交互界面,PLC与WinCC之间采用TCP/IP协议进行通信,控制系统原理如图3所示。

图3 控制系统原理图
系统采用两台西门子PLC分别控制泵站系统和阀台系统,泵站PLC控制模块主要控制升沉模拟运动系统和补偿运动系统的泵出口流量和压力,并且能够实时监测系统工作压力、流量和液压油温度等参数,使系统能够在设定工况下正常运行。阀台PLC主要控制系统中电液比例阀和电磁阀等。以补偿运动系统为例,系统采用闭环控制,阀台PLC以采集的升沉液压缸位移为输入信号,以采集的天车位移信号为反馈信号,经过PLC控制模块分析处理,向电液比例阀发出控制信号,控制补偿液压缸的运动,补偿船体的升沉运动。阀台PLC与泵站PLC基于以太网S7通信协议进行通信,两台PLC之间能够进行数据传输交换。
3.2 监控系统设计
实验台泵站控制界面如图4所示,由菜单栏、状态栏和控制栏组成。菜单栏位于界面最上部,主要是完成各界面之间的切换; 状态栏位于界面中部,主要用来监测泵站系统的各项关键参数; 控制栏位于界面下部,包括泵控制、比例控制和电磁阀控制,主要由文本按钮、输入输出域组成。
阀台监控主界面如图5所示,左端为控制栏,控制电磁阀、泵、闭环控制策略,设定升沉幅值与周期,设定PID控制参数; 中间部分为天车升沉补偿实验系统结构简图; 右端为参数监测栏,可监测平台升沉位移、天车位移、大钩位移、泵出口压力、补偿液压缸三腔工作压力、负载蓄能器压力等。
4 实验研究
在实验室进行了天车升沉补偿实验台的调试实验,实验平台见图6。以船体升沉位移±500 mm、周期15 s进行实验研究,系统升沉补偿运动曲线如图7所示。由图可知天车运动位移与船体升沉位移相反,大小基本一致。当船体向下运动时,天车向上运动,大钩位移为正;当船体向上运动时,天车向下运动,大钩位移为负; 大钩位移运动范围为-29.97~31.98 mm,补偿率为93.81%,系统运行平稳,补偿效果好。一系列测试表明,研制的天车升沉补偿实验台可以实现升沉补偿的基本控制功能,满足实验教学的需求。

图4 泵站监控系统主界面

图5 阀台监控系统主界面

图6 天车升沉补偿实验台

图7 半主动式补偿运动位移曲线
5 结语
研制了一套升沉补偿实验台,包括机械系统、液压系统、电控系统三部分,可以实现平台升沉模拟、钻井负载模拟和升沉补偿的功能; 控制系统以西门子PLC为下位机,上位机采用WinCC组态人家交互界面,采用TCP/IP协议进行通信,达到实时监测和控制的要求。
开发天车升沉补偿试验台用于石油高校机械工程学科高年级本科生的实验教学,可使学生重点了解天车升沉补偿的工作原理和结构组成,实现了实验教学与工程应用的有机结合,提高了学生的综合素质。
猜你喜欢
高技术通讯(2021年7期)2021-08-30 08:36:42
再生资源与循环经济(2021年3期)2021-04-09 14:30:18
水泥工程(2020年2期)2020-09-07 11:54:52
水泥技术(2020年3期)2020-06-06 09:39:12
西南石油大学学报(自然科学版)(2016年6期)2017-01-15 14:13:56
湖北农机化(2014年1期)2014-12-29 00:42:50
河南科技(2014年23期)2014-02-27 14:19:00
建筑机械化(2013年2期)2013-06-18 02:42:08
中国新技术新产品(2013年6期)2013-05-12 09:39:26
河北农机(2012年4期)2012-08-15 00:46:00