纯电动两挡减速箱换挡机构设计与验证
2019-05-10 02:08柴旭
汽车零部件 2019年4期
柴旭
(上海汽车变速器有限公司,上海 201804)
0 引言
当前,随着人口日益增加以及石油资源的大量使用,环境恶化、资源匮乏已经成为人们必须面对的问题,因而发掘利用绿色可再生能源已经成了当今主要的发展趋势。新能源汽车,尤其纯电动汽车成为了绿色环保的代言新星,越来越频繁地出现在人们的视野中。电驱系统作为新能源汽车的核心零部件,其技术的发展更是越来越受到人们的关注。目前,单挡减速箱以其结构简单的优势而广泛使用,但同时也会导致驱动电机无法很好地兼顾汽车的起步加速与最高车速的要求,因此需要考虑纯电动汽车两挡减速箱的设计与研发。
对此,国外的P WALKER等[1]在纯电动汽车上应用了双离合两挡变速器,研究表明该变速器对整车驱动效率和能耗有明显提升效果;国内的陈林用等[3]提出了一种用于纯电动汽车的两挡机械式自动变速器(2-speed Automated Mechanical Transmission,2AMT)结构及其电子控制单元(Transmission Control Unit,TCU)的软硬件设计,并通过试验的方式进行验证。陈淑江等[5]提出了一种兼顾动力性与经济性的策略,并给出了仿真结果。
尽管如此,针对换挡机构进行软硬件设计并通过台架试验验证的文献依旧较少。本文作者对换挡机构的主要零件进行了强度分析,制定了换挡过程的控制策略,并在台架和整车上对换挡系统的实现进行了验证。
1 整车电驱系统的组成
图1是基于大通EV80商用车提出的两挡电驱总成,主要由两挡减速箱、驱动电机、电力电子箱和电换挡系统四大组件组成。

图1 电驱系统实物图
如图2所示,驱动电机输出轴直接与两挡减速箱的输入轴相连。文中根据整车端的需求,通过理论计算选择相应型号的电机作为驱动电机。两挡减速箱主要由输入轴、中间轴、输出轴组成,为了布置方便,将同步器置于输入轴上。换挡执行机构采用便于布置和控制的电控电动式系统,结构为蜗轮蜗杆加凸轮转毂的形式,将电机的旋转运动转化为换挡拨叉的直线运动,从而驱动拨叉移动完成换挡。

图2 电驱系统示意简图
2 电换挡系统硬件设计
2.1 电换挡系统设计
换挡执行机构的动力由电机提供,选择合适的换挡电机是保证变速箱换挡机构顺利实现换挡动作的关键,换挡过程要求迅速、准确、无冲击,能在各种复杂的工况下保证较高的换挡品质。因此综合考虑换挡变速箱对驱动电机的要求以及电机的工作环境,电机的选型需要从电机的响应速度、最大换挡力、质量、成本等多种因素综合考虑。
变速箱换挡执行机构的动力由电机提供,其动力传递简图如图3所示。

图3 执行机构运动/动力传动简图
根据设计要求,电机提供的峰值转矩经过传动机构能提供不小于700 N(最大换挡力)的换挡力。最大换挡力是以换挡过程中可能出现的极限工况制定的,其值远大于换挡过程中摩擦阻力造成的影响,因此在计算电机峰值转矩时忽略换挡过程中的阻力。
根据图4所示的执行机构运动/动力简图,可以计算出执行机构驱动电机对应的输出转矩。
图4中:Fsmax为最大换挡力700 N;Fsmax1是其反作用力;l1、l2为换挡反作用力力臂,l1=0.02 m;φ为换挡拨头旋转的角度;Td1、Td2为蜗轮蜗杆输出转矩。
工况1:由图4(a)受力分析和力矩平衡可得:
Td1=Fsmax1l1
(1)

图4 执行机构运动/动力简图
即在工况1中电机输出转矩经蜗轮蜗杆增扭后输出的转矩应为
Td1=Fsmax1l1=700×0.02=14 N·m
工况2:由图4(b)受力分析和力矩平衡可得:
Td2=Fsmax1l2=Frmaxl1cosθ
(2)
即在工况2中电机输出转矩经蜗轮蜗杆增扭后输出的转矩为
Td2=Fsmax1l2=700×0.02×cosθ=14 N·m×cosθ
(3)
因为cosθ≤1,因此电机峰值转矩经蜗轮蜗杆减速增扭之后输出的转矩应大于Tdmax1,即14 N·m。
根据蜗轮蜗杆减速增扭作用,取蜗轮蜗杆的传递效率为0.7,可得:Td1=ηTmi。则:
式中:Tm为电机输出转矩;i为蜗轮蜗杆传动比(取30);η为蜗轮蜗杆的传递效率(取0.7)。则Tm=0.67 N·m,即电机的峰值转矩应大于0.67 N·m。
确定了电机的关键性能参数,对应市面上现有的成熟产品,完成电机的选型以及蜗轮蜗杆减速机构的设计。
2.2 同步器强度分析
二挡变速箱增加一个挡位有利于整车的动力性和经济性。在整车起步过程中,一挡大速比有利于大扭矩启动,加速性能好。整车速度上来后,切换二挡,有利于降低电机转速,使电机始终工作在高效区间,经济性好。
相比于一挡变速箱,二挡变速箱增加了换挡机构,文中采用的是传统同步器换挡形式,针对同步器强度进行分析。同步器齿毂材料属性如表1所示,变速箱使用中同步器承载的最大扭矩为320 N·m。
图5所示为仅加载扭矩同步器齿毂受力仿真图,图6所示为仅加载过盈同步器齿毂受力仿真图,图7所示为同时加载过盈和扭矩同步器齿毂受力仿真图。表2所示为SH32E2同步器齿毂受力分析结果汇总表。可知,当过盈量为0.025 mm时,齿毂所受最大应力在滑块槽处;当齿毂仅承受最大加载扭矩时(320 N·m),满足要求;当齿毂同时考虑过盈张力及最大传递扭矩时,齿毂应力小于350 MPa,满足考核要求。

表1 同步器齿毂材料属性

图5 仅加载扭矩同步器齿毂受力仿真图

图6 仅加载过盈同步器齿毂受力仿真图

图7 同时加载过盈和扭矩同步器齿毂受力仿真图

表2 SH32E2同步器齿毂受力分析结果MPa
2.3 换挡拨叉强度分析
拨叉材料属性如表3所示,对该拨叉强度进行分析,拨叉换挡力按照800 N进行。拨叉结构如图8所示,其CAE计算结果如图9所示。

表3 换挡拨叉材料属性

图8 拨叉结构

图9 换挡拨叉CAE计算结果
设置拨叉换挡力为800 N,对拨叉进行CAE分析。由图9(b)可知:拨叉左脚位移量为0.394 mm,拨叉右脚位移量为0.411 mm,定义拨叉的平衡度为拨叉左右脚位移之比。通常,若平衡度大于80%,则符合考核标准。
分析结论:
(1)左右脚位移之比=0.394/0.411=95.9%,即拨叉平衡度为95.9%,大于80%的考核指标,符合刚度设计要求;
(2)由图9(a)可知:拨叉的最大拉应力为48 MPa,小于抗拉强度要求的193 MPa;拨叉的最大压应力为104 MPa,小于屈服强度要求的188 MPa,故拨叉的强度符合考核要求。
3 电换挡系统软件设计
3.1 实际挡位判断模块
TCU的升降挡决策都是建立在准确识别当前挡位的基础上,TCU软件通过拨叉位置传感器检测拨叉位移,判断当前所处挡位。当检测到拨叉位置一挡在位时,此时实际挡位为一挡;当检测到拨叉位置二挡在位时,此时实际挡位为一挡;当检测到拨叉位置N挡在位时,此时N挡在位,实际挡位判断模块流程图如图10所示。
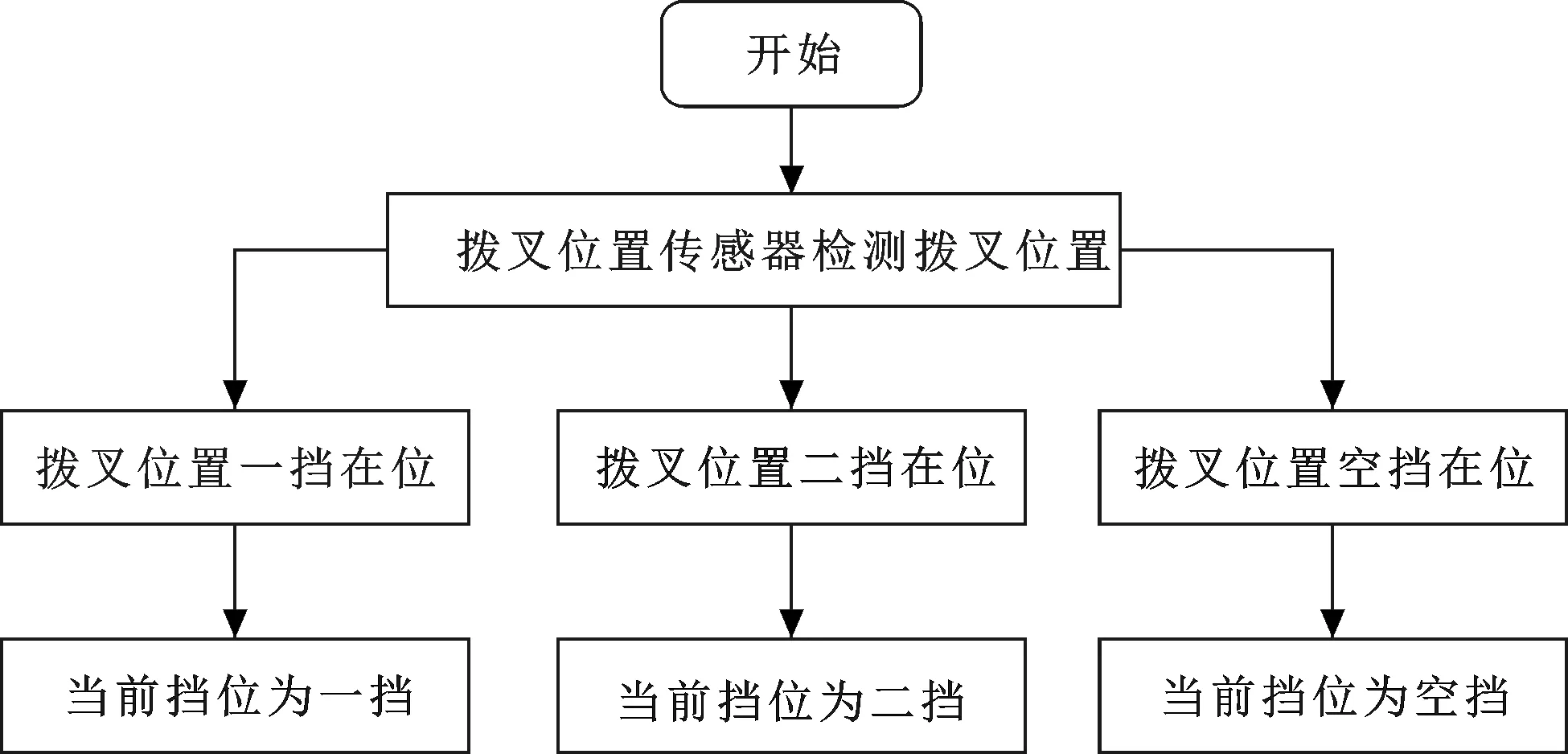
图10 实际挡位判断模块流程图
3.2 目标挡位判断模块
在车辆行驶过程中,确定正确的目标挡位,TCU才能正确控制换挡电机以及驱动电机动作,实现挡位间的切换。目标挡位的判断是通过采集车速信号、加速踏板信号、制动踏板信号综合决策得出的。目标挡位判断模块流程图如图11所示。

图11 目标挡位判断模块流程图
3.3 换挡电机控制模块
在换挡过程中,换挡电机主要的功能为控制拨叉的动作,主要包括退拨叉、挂拨叉、消除空行程,如图12所示为变速箱换挡电机控制模块流程图。

图12 换挡电机控制模块流程图
3.4 驱动电机控制模块
在变速箱换挡过程中,需要按照控制策略对驱动电机进行调扭和调速,才能保证挡位的顺利切换。当目标挡位和当前挡位不一致时,驱动电机要清扭调速,退出当前挡位,接着调速调扭,保证同步器两端同步结合以及动力传递。如图13所示为变速箱驱动电机控制模块流程图。

图13 驱动电机控制模块流程图
3.5 换挡参数计算模块
TCU将传感器采集的数据根据其物理意义进行计算,并根据需要可将数据发送到CAN总线上。计算的数据主要包含换挡电机的转速及其输出转矩和换挡拨叉当前位置,以及换挡力的计算。
3.6 换挡过程控制模块
在换挡过程中需要对换挡机构与驱动电机分别控制才能实现挡位的快速平稳切换。对驱动电机调速和调扭,保证输入轴与输出轴转速能迅速同步,对换挡电机调节,从而控制拨叉运动,实现换挡机构快速退挡挂挡。
针对两挡变速箱没有离合器的机械结构,将整个换挡过程划分为9个阶段:(1)实际挡位检测;(2)驱动电机扭矩清零;(3)退拨叉与摘挡;(4)驱动电机调速;(5)驱动电机扭矩清零;(6)消除同步器空行程;(7)检查输入输出轴转速,满足同步条件后深挂一次拨叉;(8)挡位切换;(9)驱动电机回扭。针对不同的阶段设计不同的算法或目标参数并在算法中设计切换条件。
同时在TCU软件中,针对换挡逻辑设立容错机制:(1)在进入换挡逻辑前,检测TCU是否存在故障,按照故障等级,进行相应的后处理。故障等级为1级时,按照原有挡位行驶;故障等级为2级时,拨叉回中位,驱动电机扭矩清零,原地停车等待;(2)在进入换挡逻辑时,若同步时间过长,则拨叉回中位,且错误一次时,拨叉回目标挡位拨叉位置,对驱动电机调速,重新开始对驱动电机清扭;若同步时间过长,拨叉回中位,且错误达到两次时,对驱动电机扭矩清零,拨叉回中位,车辆停止行驶。换挡过程控制逻辑图如图14所示。

图14 换挡过程控制逻辑图
4 试验
4.1 台架动态换挡测试
台架动态换挡试验旨在利用台架电机模拟虚拟车速进行模拟换挡,其换挡过程与整车一致。由于利用输出轴反拖驱动电机,故减少了驱动电机转矩调零阶段和驱动电机转矩恢复阶段。
控制逻辑:(1)先由台架模拟整车VCU信号给PCU发出D Mode指令使驱动电机使能;(2)台架电机带动输出轴模拟到换挡车速点;(3)台架模拟VCU给TCU发出虚拟车速,达到两挡变速箱换挡点;(4)检测驱动电机调速完成后开始消除空行程并挂入拨叉;(5)检测拨叉位置达到自学习阈值,换挡成功。图15所示为一挡换二挡数据,图16所示为二挡换一挡数据。

图15 一挡换二挡数据(台架试验)

图16 二挡换一挡数据(台架试验)
4.2 实车动态换挡测试
实车动态换挡试验旨在利用台架软件进行实车测试。其换挡过程较台架换挡更为完整,有驱动电机主动介入,增加了降扭以及回扭的换挡过程,主观感受换挡性能,调整换挡时间以及换挡力。
控制逻辑:(1)驱动电机转矩调零;(2)变速箱摘挡;(3)驱动电机调速;(4)驱动电机转矩调零;(5)消除同步器空行程;(6)同步器两端转速同步控制;(7)变速箱进挡;(8)驱动电机转矩恢复,回到驾驶员需求扭矩,换挡成功。图17所示为二挡换一挡数据,图18所示为一挡换二挡数据。

图17 二挡换一挡数据(实车试验)

图18 一挡换二挡数据(实车试验)
4.3 整车道路换挡时间
当VCU检测到达换挡车速时,开始换挡过程,驾驶员有动力丢失感,主要从驱动电机开始降扭开始计算直至驱动电机开始回扭。整个换挡过程中,动力丢失的时间约为1 s,如图19所示,换挡动力中断时间表如表4所示。

图19 整车换挡时间

表4 换挡动力中断时间表s
5 结束语
文中针对纯电动汽车两挡减速箱换挡系统进行了软硬件的设计,为功能试验的实现与验证做了良好基础。
针对硬件设计和强度分析后,最终需要通过软件控制策略来满足试验中的需求。
在进行试验之前,需要根据实际的使用情况进行试验设计,包括试验环境设定、试验设备选取及最重要的试验工况和试验时间确定。
猜你喜欢
汽车实用技术(2022年19期)2022-10-19
汽车实用技术(2022年11期)2022-06-20
舰船科学技术(2022年10期)2022-06-17
防爆电机(2022年3期)2022-06-17
汽车实用技术(2022年10期)2022-06-09
防爆电机(2022年2期)2022-04-26
汽车实用技术(2022年7期)2022-04-20
汽车实用技术(2021年12期)2021-07-03
电机与控制学报(2018年9期)2018-05-14
科技与创新(2017年5期)2017-03-28