
基于模型预测控制的智能车辆主动避撞控制研究*
2019-05-07 09:03熊周兵
汽车工程 2019年4期
任 玥,郑 玲,张 巍,杨 威,熊周兵
(1.重庆大学汽车工程学院,机械传动国家重点实验室,重庆 400044; 2.重庆长安汽车工程研究院,重庆 401120)
前言
高度自动驾驶是智能汽车未来的发展趋势,它由环境感知和决策控制系统组成[1-3]。环境感知系统通过采集道路、车辆、行人和交通标志等信息,对车辆运行环境进行感知和识别;决策控制系统则根据环境感知的结果,规划出安全的局部路径并控制车辆安全、稳定行驶。自动驾驶车辆的主动避撞问题一直是高度自动驾驶研究的一个热点问题。
近年来,有不少学者对自动驾驶车辆的避障问题进行了研究。Tomas-Gbarron等[4]将自主车辆的避障问题转换成多目标的优化问题,以计算最优的行驶轨迹。Fraichard等[5]提出利用增强型拉格朗日粒子群优化算法,在有运动障碍物的动态环境中为自主无人车找到一条理想路径。Frazzoli等[6]针对静止和运动的障碍物,在概率路线的基础上提出了一种新的随机增量路径规划算法。Moon等[7]在人工势场算法基础上综合考虑汽车的位置、速度以及方向来处理实时避障问题。在国内,董红召等[8]提出了一种基于车路一体化技术的车辆主动避撞系统,建立了以动态制动减速度为关键参数的车辆临界跟车距离模型,具有响应快、自适应性和鲁棒性强的特点。赵伟等[9-10]针对汽车在两车并行工况下容易出现侧向碰撞的问题,建立了基于车间距及其变化率的模糊控制模型或模糊-PID控制模型,利用主动转向模糊控制技术控制两车之间的侧向距离,减少其在超车时发生碰撞的危险。吉林大学廉宇锋[11]分别研究了电动汽车纵向避撞控制与侧向避撞控制,并根据工况制定了转换策略。刘子龙[12]提出了基于输入输出反馈线性化的横向运动控制方法,并应用于无人驾驶车的路径跟踪,显示了良好的横向跟踪动态性能和稳定性。余如等[13]针对自主驾驶车辆的避障问题,提出一种基于人类驾驶行为的预测避障控制方案,采用预瞄点搜索算法规划出期望的侧向行驶位移和纵向行驶速度,设计了线性模型预测控制器以跟踪避撞轨迹,从而避开了动态障碍车辆。
以上避撞问题研究大多采用质点来描述障碍物信息,并采用纵、侧向安全距离的形式描述碰撞风险,对动态障碍物碰撞描述不够精确。另外基于预瞄反馈的跟踪控制,受预瞄距离限制,难以实现全局最优轨迹控制。
模型预测控制(model predictive control,MPC)是工业领域先进的控制方法之一,利用预测模型来预测未来的输入、输出偏差,通过在线有限时域滚动优化和反馈校正确定当前的最优控制目标值,具有实时性、全局性和鲁棒性的特点。本文中运用模型预测控制的思想,针对自动驾驶中的主动避撞控制问题,提出基于模型预测理论的分层避撞控制架构,并设计其规划方法和控制策略,实现自动驾驶车辆的自主循迹和避撞控制。
车辆分层避撞控制构架如图1所示,它分为路径规划层和路径跟踪层,上层路径规划层根据传感器获取的障碍物相对位置信息和车辆运动状态,采用人工势场方法描述障碍物碰撞风险,并基于五次多项式规划出局部避撞路径,下层路径跟踪层以上层控制器规划出的局部避撞路径为参考,控制车辆转向盘转角,实现主动避撞功能。
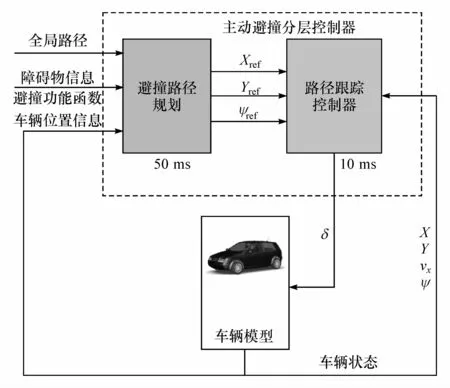
图1 智能车辆主动避撞控制架构
1 车辆避撞路径规划
智能汽车的运行环境复杂,为实现智能车辆的主动避撞控制,必须根据智能汽车的环境感知信息,建立风险态势场,对碰撞风险进行预估并规划出安全的局部路径。
1.1 车辆运动学模型
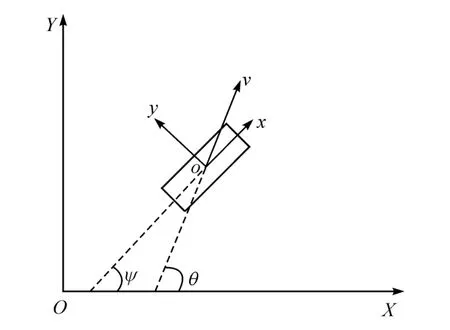
针对避撞路径规划,考虑到动力学模型的复杂性会导致求解效率下降,因此将车辆简化为刚体,建立刚体平面运动模型,如图2所示,XOY为全局坐标系,xoy为车辆局部坐标系。
刚体运动学模型可描述为
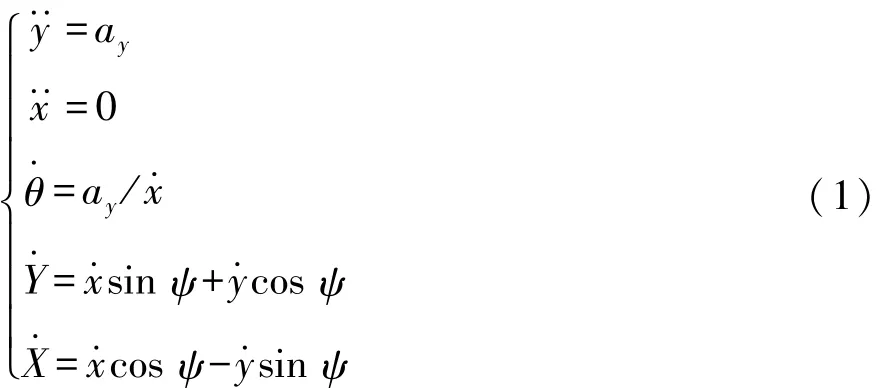

式(2)为连续非线性状态方程,为设计模型预测控制器,必须将非线性连续系统转化为线性离散系统。
这里采用泰勒展开并忽略高阶项,设在当前时刻系统的状态和输入分别为X0,u0,则在其附近,式(2)可改写为
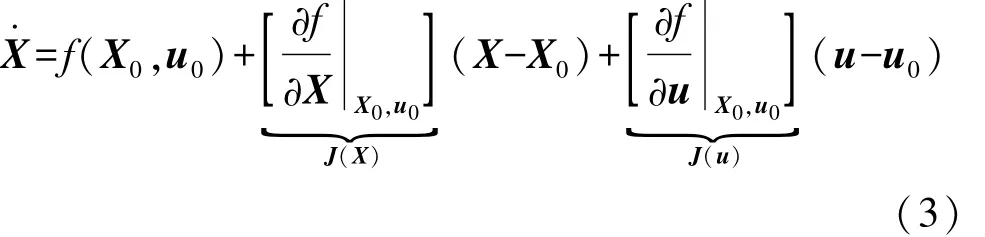
式中:J(X)和 J(u)为 f(X(t),u(t))对状态和输入的雅克比矩阵。因此,原模型被线性化为
定义模型预测控制的预测步长为P;控制步长为N。则整个预测范围内系统预测输出与系统当前状态的关系为

其中系统预测输出为
状态矩阵和控制矩阵分别为
1.2 避撞优化目标函数
针对自主避撞控制,其目标是尽量减小车辆与全局参考路径的偏差,以实现避撞功能。此外,控制增益尽量小,以保证避撞过程的平稳、舒适。基于人工势场理论,定义轨迹规划的优化目标函数为

式中:Jpos,i为引力场函数,引导车辆行驶于全局参考路径上;Jobs,i为斥力场函数,使车辆远离障碍物;Ju,i为控制力函数,使控制量尽量小。其中,引力场函数可表示为

式中:yi为第i步的模型预测输出;yref为全局参考路径。控制力函数可表示为

式中ui为在控制时步长内第i步的控制输入。对于斥力场函数,本文中综合考虑与障碍物的相对距离与相对速度,定义为

式中:Sobs为权重系数,其值越大,避障路径规划越保守;vr为车辆此时与障碍物的相对速度;(xi,yi)为车辆在第i步的预测位置;(xo,yo)为障碍物位置;ε为给定的一个较小正数,防止分母为零。
图3为相对速度分别为10和15 m/s时的斥力势能图。
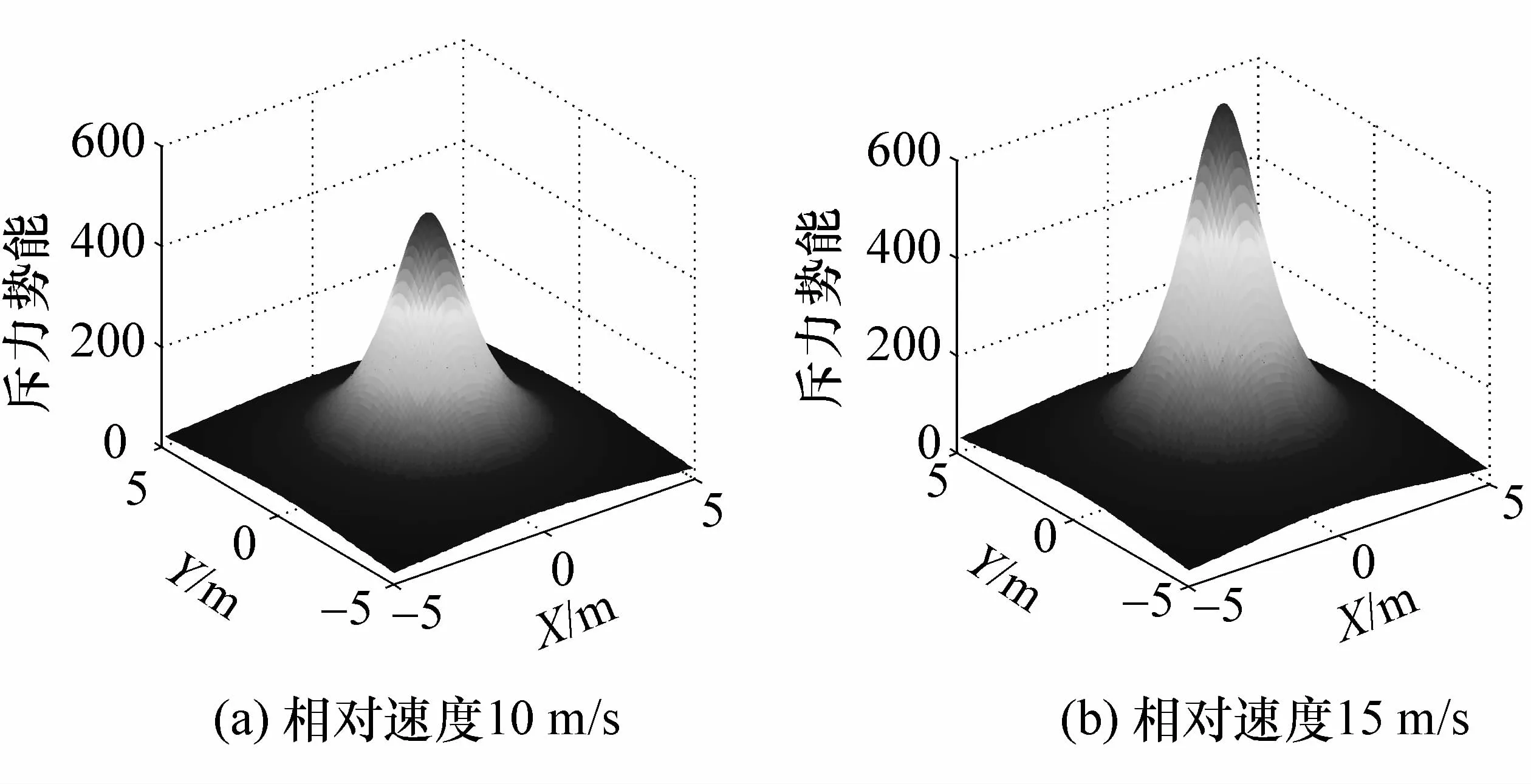
图3 斥力场函数
由图3可知,当车辆与障碍物相对距离越小,相对速度越大时,斥力场函数值越大,说明该时刻碰撞风险较大。而当车辆与障碍物足够远时,斥力场函数为趋近于0,表明该时刻无碰撞风险。在优化求解过程中,为使得总势场能量最小,车辆总会朝着斥力场能量低的方向运动,以此达到避撞的目的。
由于在车辆建模过程中,并未考虑车身尺寸的问题,因此,为保证轨迹规划可行性并实现车辆避撞,还需要根据车身尺寸对障碍物进行膨胀处理,参照文献[14]中提出的膨胀方法,以车辆运动中心的内切圆和外接圆半径对障碍物膨胀,如图4所示。
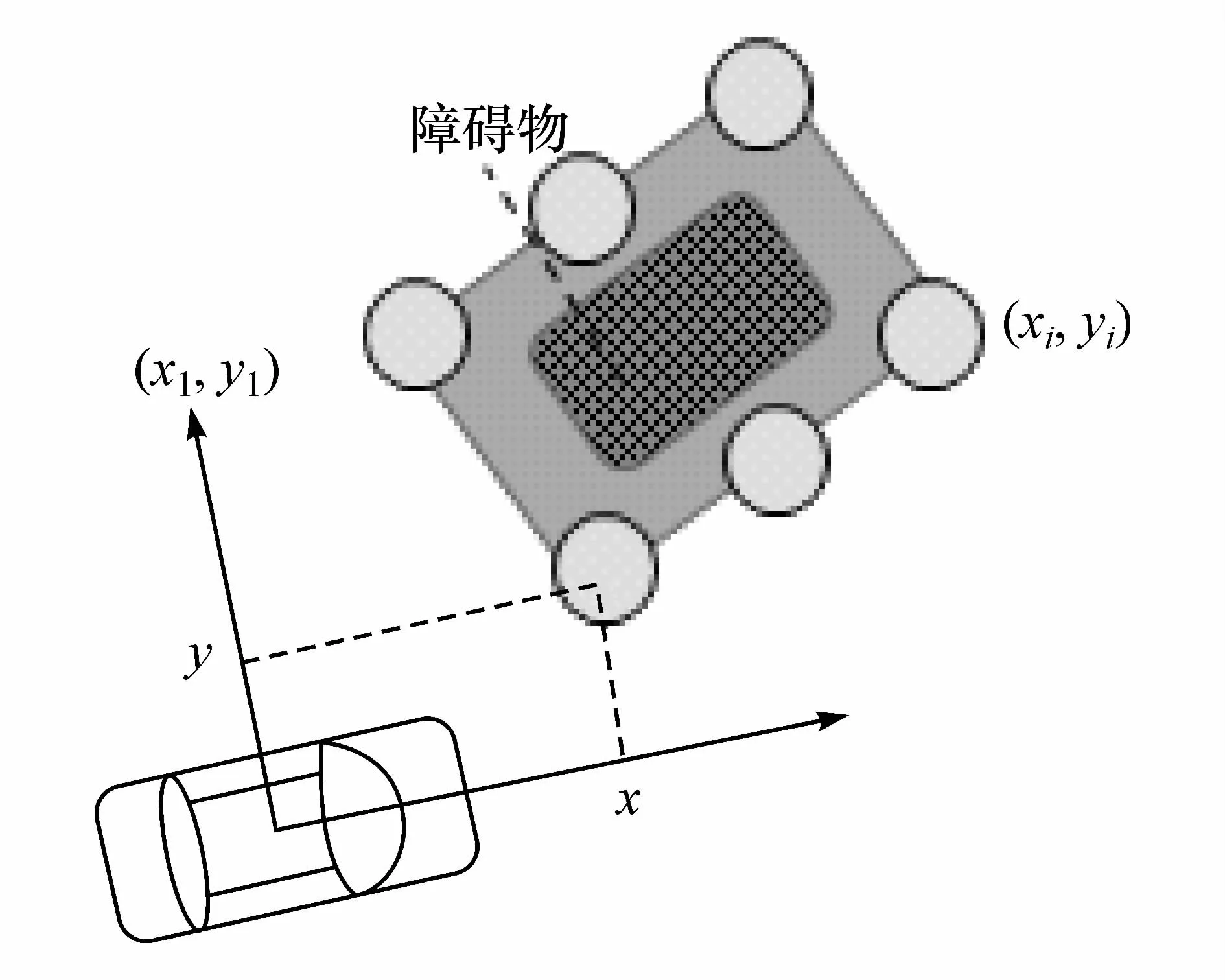
图4 障碍物膨胀
为保证局部路径轨迹规划切实可行,还须对优化控制输入ay进行约束。考虑车辆匀速转向工况,侧向加速度由轮胎侧向力提供,考虑轮胎附着力极限,侧向加速度ay必须满足:

1.3 局部避撞路径
据大量有关驾驶员转向避障行为的研究可知,采取转向避撞过程中车辆的行驶轨迹近似于一条五次多项式曲线[15]。五次多项式所规划的避撞参考路径,各点的位移、曲率曲线连续且光滑,符合驾驶员习惯,更容易被接受[16]。因此,本文中采用五次多项式拟合局部避撞路径:

式中:μ为路面附着系数,结合式(7)和式(11),则局部路径规划转化为约束优化问题:

式中ci为拟合多项式各系数,以此获得局部避撞参数化路径。
2 车辆路径跟踪控制
对于下层路径跟踪控制器,本文中建立3自由度单轨动力学模型,研究智能汽车自主避撞的控制策略。建模过程中,考虑匀速转向控制,作出如下假设:①智能车辆在平坦路面行驶,忽略坡度等因素和车辆的垂向运动;②悬架系统和车辆是刚性的,忽略悬架运动及其对车辆纵、横运动耦合的影响;③只考虑纯侧偏轮胎特性,忽略轮胎力纵横向耦合的关系;④采用平面运动车辆模型来描述车辆运动,不考虑左右载荷转移;⑤车辆行驶纵向速度基本恒定,忽略前后轴载荷转移;⑥忽略纵横向空气动力学等阻力。3自由度单轨动力学模型如图5所示。
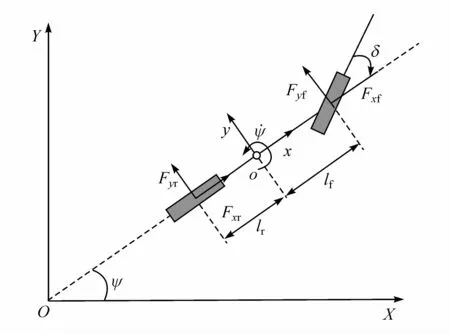
图5 车辆单轨动力学模型
根据牛顿第二定律,车辆动力学方程为
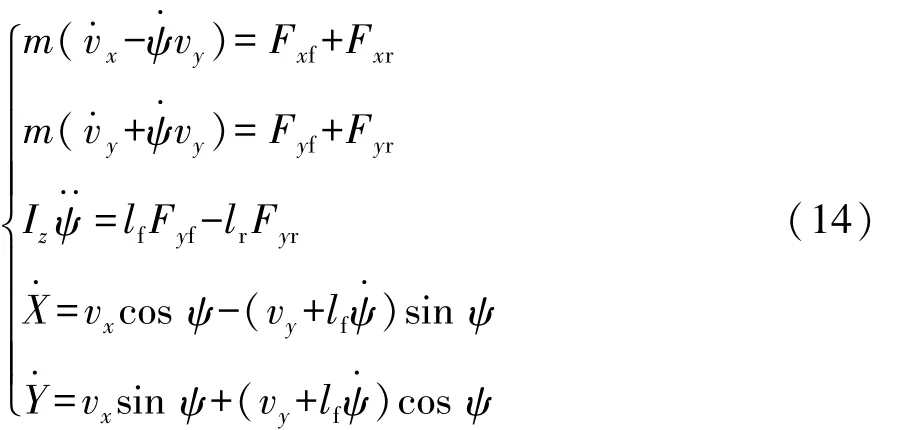
式中:m为整车质量;vx,vy,分别为车辆纵向速度、横向速度和横摆角速度;lf,lr分别为质心至前、后轴距离;Fxf,Fxr分别为前、后轴纵向力;Fyf,Fyr分别为前、后轴侧向力。
在前轮转角较小的情况下,轮胎侧向力与侧偏角近似于线性关系:
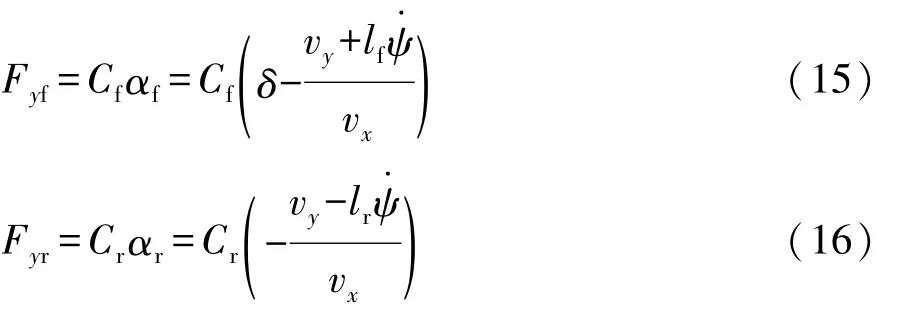
式中:αf,αr分别为前、后轮侧偏角;Cf,Cr分别为前、后轮侧偏刚度。
结合式(14)~式(16),选取状态变量 ξ=[X,u,Y,v,ψ,ψ·]T,输入为前轮转角,输出为 η=[Y,ψ,u]T,则车辆动力学方程为

采用与1.1节中相同的线性化与离散化方法,其离散状态方程为

考虑路径跟踪过程中,应该使实际路径与参考路径的偏差和控制输入增益尽可能小,由此定义路径跟踪模型预测控制(MPC)优化目标函数为
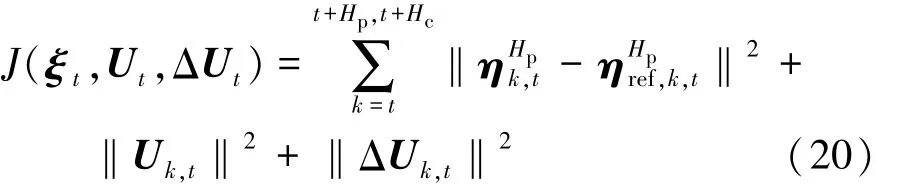
式中等号右侧第1项为路径偏差,第2项为输入控制量,第3项为控制量变化率。该优化目标函数为标准二次型凸优化问题,采用QP(quadratic programming)求解器,可快速求得全局最优控制序列U=[δk,δk+1,…,δk+Nc],每次计算都取第 1项作为此时刻控制输入,输入至车辆模型,如此循环迭代。
3 仿真结果分析
为验证所提出的分层避撞控制构架和控制策略的有效性,搭建Carsim/Matlab联合仿真平台,对分层避撞控制器的路径规划和跟踪控制性能进行了仿真计算。车辆为前轮驱动式车辆,主要参数如表1所示。
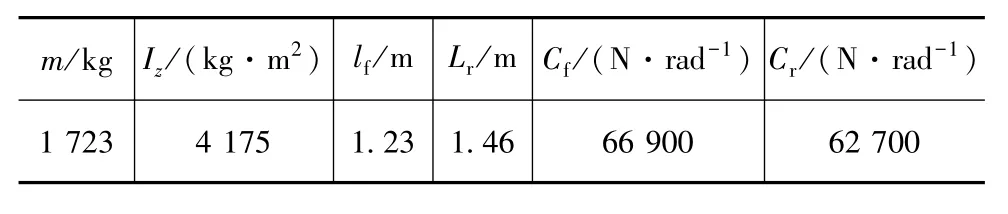
表1 车辆主要参数
3.1 路径跟踪性能
为验证控制器在不同路面附着条件和车速下的循迹能力,设计3种工况,路面附着系数μ为0.8,0.6和0.3,分别对应干燥水泥路面、湿滑路面和雪地。纵向车速范围设定为36~108 km/h。参考路径为单移线,模拟车辆变道工况。仿真结果如图6~图8所示。
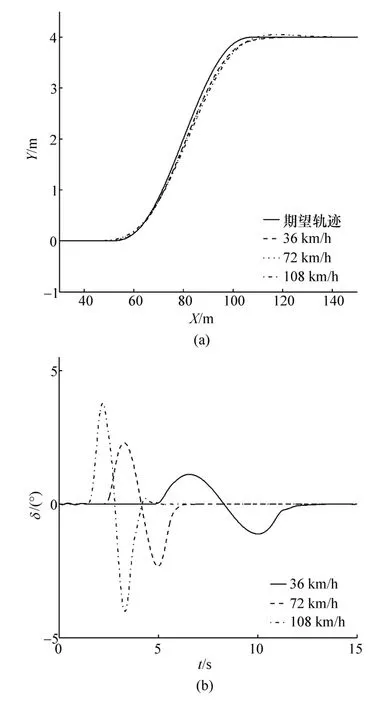
图6 干燥水泥路面仿真结果
图6 (a)~图8(a)为不同路面附着系数和不同车速下的车辆轨迹。图6(b)~图8(b)为车辆转向盘转角。从图中可以看出,路面附着系数越高,车速越低,路径跟踪的效果越好。在这种工况下跟踪误差较低,转向盘转角输入也比较平缓。随着附着系数的降低和车速的增加,车辆跟踪误差开始增大。从图8(a)中可看出,当附着系数为 0.2,车速为90 km/h时,车辆与期望路径发生较大偏离。这是由于在低附着路面上高速行驶,轮胎达到附着极限,轮胎力进入饱和区域,此时车辆侧向力不再随转向盘转角增大而增大,车辆产生侧滑,故与参考路径产生较大误差。但在转向过程中,车辆仍在安全约束范围内。说明控制器对于路面附着系数和车速具有较广的适应性,对于常见的驾驶工况都具有较好的跟踪效果。综上所述,所设计的路径跟踪控制器能根据建立的车辆预测模型来预测未来的输出,且很好地跟踪预期转向避撞的轨迹,对于不同路面附着情况和不同车速有较好的适应性。

图7 湿滑路面仿真结果
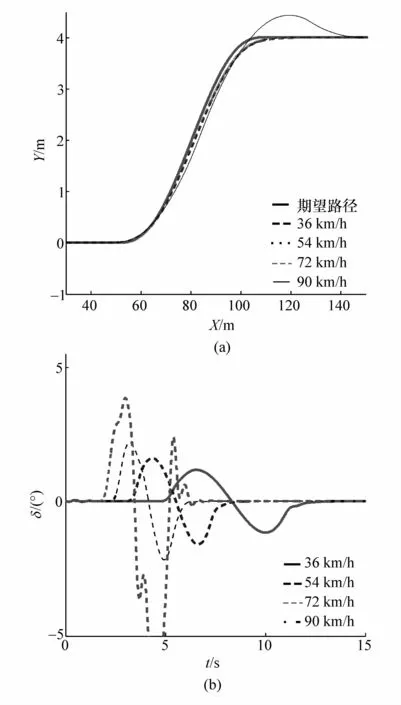
图8 冰雪路面仿真结果
3.2 分层控制器性能测试
测试分层控制器的性能时,设置仿真工况如下:车辆全局参考路径为直线行驶,在路径上存在两个障碍物,位置坐标分别为(30,-0.5)和(90,0.5)。经膨胀后障碍物尺寸为5 m×1 m。被控车辆从原点(0,0)出发沿y=0.1的直线行驶。分层控制系统参数选择为上层控制器预测步长40步,控制步长20步,下层控制器预测步长10步,控制步长5步。仿真结果如图9所示。
由图9可知,在不同车速下,车辆均可自主规划局部避撞路径,并沿着避撞路径规避障碍物,说明避撞控制功能有效;此外,由图9(a)还可看出,避撞路径的规划与车速相关,车速越大,路径规划越早,且规划出的路径曲率比低速下的规划路径曲率小。图9(b)表明,高速行驶过程中,车辆前轮转角更小,符合车辆在高速下的实际控制情况。因此,基于MPC理论设计的分层避撞控制器具有完整且有效的规划跟踪功能,同时在不同车速下均有较好的控制效果,体现了良好的鲁棒性。
4 结论
针对自动驾驶车辆的主动避撞问题,提出了基于模型预测理论的分层避撞控制构架及控制策略。搭建了Carsim/Matlab联合仿真平台,对不同路面、车速情况下的车辆避障路径规划与跟踪控制性能进行了仿真验证。
仿真结果表明:基于车辆运动学模型的上层避撞路径规划器能根据车辆当前状态和障碍物相对运动信息,实时、准确地规划出局部避撞路径;下层路径跟踪控制器考虑车辆动力学特性,能准确地预测车辆未来状态并优化求得最优转向盘转角,准确、稳定地跟踪避撞轨迹。
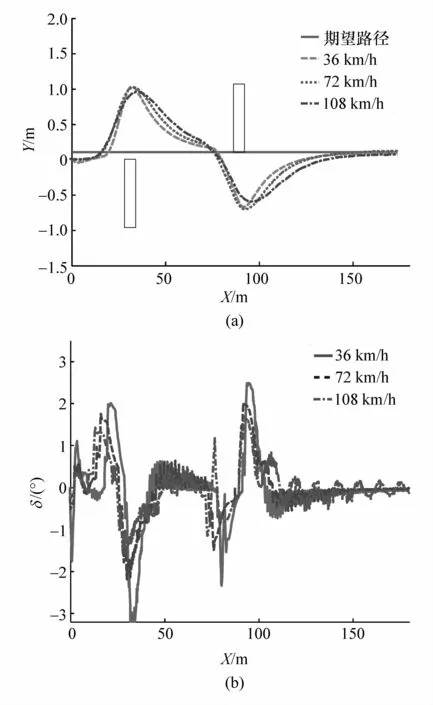
图9 分层控制器仿真结果
本文中仅考虑了匀速工况下的转向避撞控制策略,在高速、低附着工况下跟踪精度相对较差,下一步的工作将考虑车辆纵、横耦合避撞控制,实现车辆局部避撞路径与速度的一体化规划。
猜你喜欢
舰船科学技术(2022年11期)2022-07-15
中国自行车(2022年3期)2022-06-30
汽车实用技术(2021年23期)2022-01-05
动漫界·幼教365(中班)(2020年3期)2020-04-20
客车技术与研究(2019年2期)2019-11-26
创新作文(1-2年级)(2019年4期)2019-10-15
网络空间安全(2019年8期)2019-03-18
好孩子画报(2019年10期)2019-01-10
汽车杂志(2018年6期)2018-06-25
作文周刊·小学一年级版(2017年27期)2017-08-10
