
基于微电网的城轨再生制动能量回馈系统
2019-04-24 00:54路涛涛田铭兴
铁道标准设计 2019年5期
路涛涛,田铭兴
(1.兰州交通大学自动化与电气工程学院,兰州 730070; 2.甘肃省轨道交通电气自动化工程实验室(兰州交通大学), 兰州 730070)
引言
城市轨道交通(以下简称“城轨”)由于站间距短,车辆启动制动频繁,运行过程中产生相当可观的制动能量。以广州地铁4号线为例,制动能量占牵引能量的30%左右,如果将这部分能量加以利用,每年节约电能可达8.0×106kW·h,节约电费及设备损耗费可达700万元/年[1]。
目前针对城轨再生制动能量,有电阻耗散式,逆变回馈式、储能回馈式等回馈利用及优化运行图或发车间隔供给相邻列车等多种利用方式。对再生制动能量储能回馈的研究主要有储能容量的优化配置[2-3],系统数学模型的建立和系统的优化设计[4-6],以及储能装置的控制策略[7-8]等;对再生制动能量逆变回馈的研究主要有系统能馈拓扑结构[9],回馈能量与接触网电压之间关系[10],以及回馈装置的优化设计[11]等;优化运行图利用再生制动能量的研究,主要通过优化时刻表使加速列车和制动列车动作同步,将再生制动能量供给同一供电区间的加速列车使用[12-13];还有一些文献对当前再生制动能量的利用方式及工程应用情况作了全面综述[14-16]。但电阻耗散式造成能量浪费,与节能减排的原则相悖;储能回馈式所需储能容量较大,成本较高,同时车载储能还会增加车体质量;逆变回馈式由于再生制动能量的冲击性和间歇性可能威胁动力照明系统的电能质量和供电可靠性;优化运行图或时刻表的方式可能影响城轨的行车安全或造成客流时空分布与行车量时空分布的不统一等问题。
电动汽车作为新兴负荷和移动式储能装置,其充放电行为具有可调度特性,利用V2G技术使其参与微电网调度,平抑可再生能源出力波动性和间歇性的研究得到了广泛关注[17-18]。随着电动汽车的逐渐普及,城轨出入口周边一般安装有电动汽车充电桩,方便车主使用。同时,据统计,电动汽车一天内90%的时间都处于停滞状态[17],且为满足电动汽车快速充放电,所用储能系统一般含有超级电容器,其具有储能密度大、放电比功率高、快速充放电能力强、循环寿命长,相比于其他储能装置,具有更优异的大电流充放电特性[19-21]。借鉴电动汽车的V2G技术,针对目前城轨再生制动能量回馈利用中存在的问题,提出一种基于微电网的再生制动能量回馈系统,由于电动汽车所用储能装置大电流快速充放电特性可以匹配城轨再生制动能量时间短、冲击大的特点,利用电动汽车的闲置时间发挥其储能特性和可调度特性,平抑再生制动能量的冲击性和间歇性,使车站动力照明系统能够尽可能多地使用再生制动提供的绿色电力,实现节能减排。
1 系统结构
基于微电网的城轨再生制动能量回馈系统结构示意如图1所示,Buck变换器接于站台接触网,当有列车进站时,将再生制动能量回馈给直流母线,由直流母线进行再生制动能量的分配,当无列车进站时,Buck变换器处于闭锁状态。
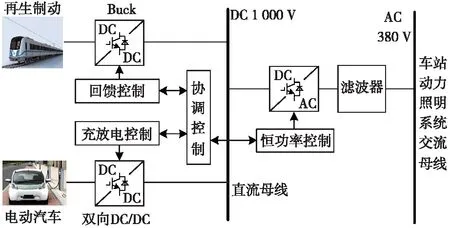
图1 基于微电网的城轨再生制动能量回馈系统示意
电动汽车由于其充放电可调度,将其作为能量缓冲环节,平抑制动能量的间歇性和冲击性。其充放电主电路采用基于互补PWM控制的双向DC/DC变换器,当有列车进站时,吸收再生制动能量的峰值,平抑再生制动能量的冲击性;当无列车进站时,作为电源为车站动力照明系统供电,弥补制动能量的间歇性。逆变器采用恒功率控制,为车站动力照明系统提供稳定功率,以减小制动能量的冲击性和间歇性对系统的不利影响,使系统能够尽可能多地使用再生制动提供的绿色电力。
2 运行控制
2.1 再生制动能量回馈控制
由于城轨采用二极管多脉波整流机组为列车供电,能量只能单向流动,当进站列车再生制动时,一部分制动能量会被相邻列车吸收,剩余能量将会使接触网电压升高。因此,根据站台处接触网电压来判断是否有列车再生制动,当检测到站台处接触网电压高于Buck变换器回馈控制的启动电压时,启动Buck变换器,回馈再生制动能量,当检测到站台处接触网电压低于Buck变换器回馈控制的启动电压时,Buck变换器处于闭锁状态。城轨列车进站时能够回馈的最大制动功率与接触网电压之间的关系为[10]
(1)
式中,Uc为接触网电压;μa和μb分别为接触网和钢轨的电阻率;d为制动列车距车站的距离。
这里给出一种基于饱和PI调节器的再生制动能量回馈控制方法,其控制框图如图2所示,由接触网电压外环和Buck变换器电感电流内环组成。图中,Ust为再生制动能量回馈启动电压,iL为Buck变换器输出电流。
Buck变换器回馈控制的调节过程为:当Uc

图2 再生制动能量回馈控制框图
相比于传统控制断路器通断的回馈方法[22],该方法中的饱和PI调节器可以起到断路器的作用,回馈系统可以取消直流断路器,减少系统投资成本和运行维护费用。
2.2 逆变器恒功率控制
为减小再生制动能量的冲击性和间歇性对车站动力照明系统的不利影响,逆变器采用恒功率控制,其控制框图如图3所示。同时为减小谐波污染,电流环采用PR控制器,使并网电流正弦化。图中,Pset为给定功率;Us为交流母线电压;PLL为锁相环;Kpwm为逆变器放大倍数;L为滤波电感;R为损耗电阻;U0为逆变器输出电压;iabc为逆变器输出电流。
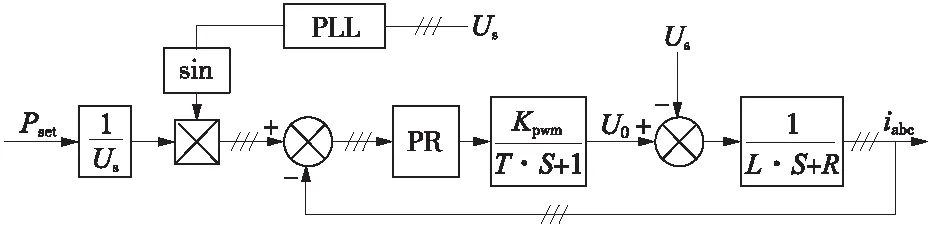
图3 逆变器恒功率控制框图
设城轨车辆一个牵引、惰行、制动工况的时间为T,再生制动的时间为t,则再生制动功率最大值在一个牵引、惰行、制动工况下的平均值
(2)
逆变器恒功率控制时,将其参考功率给定为再生制动功率理论计算值在一个牵引、惰行、制动工况下的平均值,即
(3)
2.3 电动汽车充放电控制
将电动汽车作为储能单元,发挥其可调度特性,在回馈再生制动能量时,吸收制动能量的峰值,平抑制动能量的冲击性,回馈结束时,作为电源为车站动力照明系统供电,弥补制动能量的间歇性。因此,其充放电功率
PEV=Prb-Pset
(4)
式中,Prb=Udc·Ibuck为实际回馈的再生制动功率,即Buck变换器输出功率;Udc为直流母线电压;Ibuck为Buck变换器输出电流;Pset为逆变器输出功率。

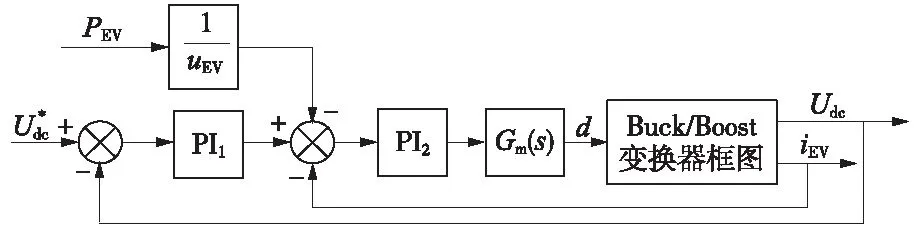
图4 电动汽车充放电控制框图
3 协调控制
从图1可以看出,再生制动能量需根据接触网电压进行回馈控制;并网逆变器需恒功率控制;电动汽车储能单元吸收制动能量的峰值,并弥补制动能量的间歇性,但输出受容量约束,需根据荷电状态(state of charge,SOC)进行充放电管理。

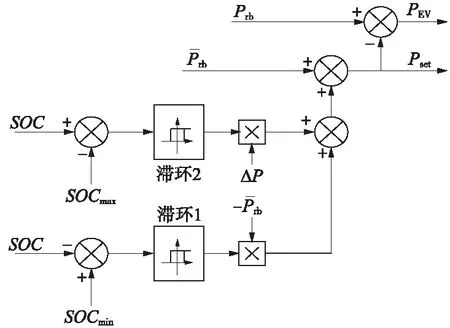
图5 协调控制框图
4 仿真分析
为验证所提基于微电网的城轨再生制动能量回馈系统的可行性,在Matlab/Simnlink中搭建如图1所示仿真系统。仿真中设再生制动功率最大值为50 kW,且无相邻列车吸收,一个牵引、惰行、制动工况的时间为5 s,再生制动时间为2 s,制动功率的平均值为20 kW;电动汽车储能单元仿真中用超级电容器代替,其电容值设为5F,额定电压为500 V;回馈系统启动电压设为1 750 V。
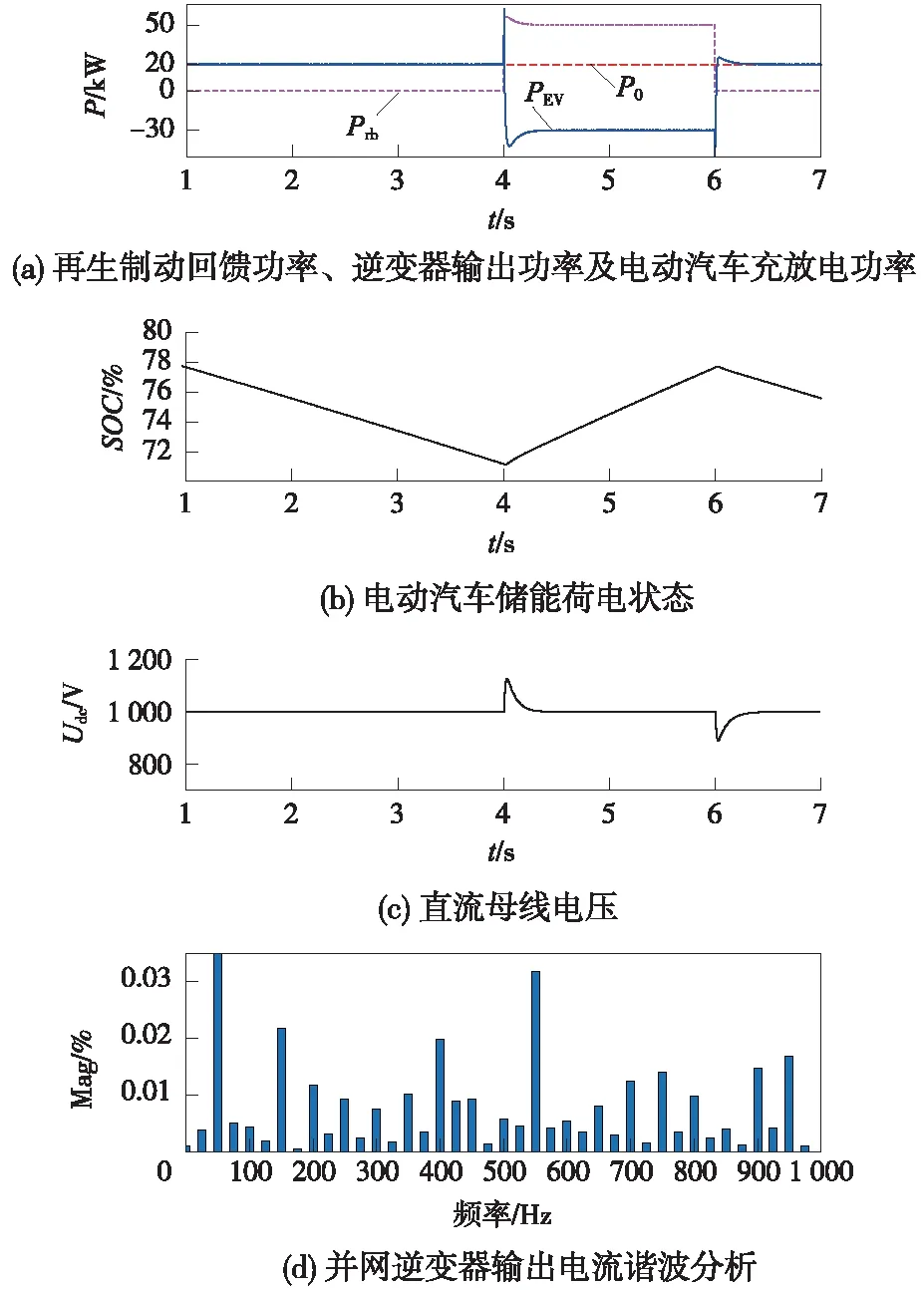
图6 再生制动能量微电网回馈仿真波形
图6所示为基于微电网的再生制动能量回馈系统运行控制仿真波形,图中,Prb为再生制动回馈功率,P0为逆变器输出功率,PEV为电动汽车充放电功率。
从图6(a)、图6(b)仿真波形可以看出:1~4 s期间接触网电压低于1 750 V,再生制动回馈功率为0,由电动汽车放电使逆变器输出恒功率20 kW,平抑制动能量的间歇性;4 s时接触网电压高于1 750 V,以最大电流回馈制动能量,逆变器恒功率运行,输出功率20 kW,这时电动汽车吸收制动能量的峰值,稳定后其充电功率为30 kW,平抑制动能量的冲击性;6 s时接触网电压低于1 750 V,回馈结束,再生制动回馈功率为0,这时与1~4 s期间的运行状态一致。
从图6(c)可以看出,在整个运行过程中直流母线电压都保持在1 000 V左右,使系统稳定工作;从图6(d)可以看出,基于PR控制的逆变器输出电流谐波畸变率只有0.67%,对动力照明系统无谐波污染。
图7所示为电动汽车电状态越限仿真波形,以越下限为例,仿真中电动汽车储能荷电状态下限设定为25%,其初始荷电状态设为33%。图中符号含义与图6相同。
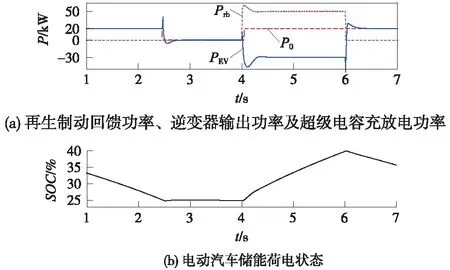
图7 电动汽车荷电状态越限仿真波形
从图7(b)可以看出,2.5 s时储能荷电状态达到设定下限25%,SOC与SOCmin的偏差经滞环比较器1输出为1,此时逆变器给定功率修正值-20 kW,逆变器参考功率给定Pset=0,电动汽车放电功率PEV=Prb-Pset也为0,系统转为待机状态;4 s时,接触网电压高于1 750 V,系统开始回馈再生制动能量,电动汽车开始充电,其荷电状态恢复到安全可控范围内,逆变器也恢复到恒功率运行,4 s以后的运行状态与图6一致,不再赘述。
从上述仿真波形和分析可以看出,所提基于微电网的再生制动能量回馈系统是可行的,电动汽车能够平抑再生制动能量的冲击性和间歇性,同时保证其荷电状态的安全可控。
5 结论
城轨由于站间距短,车辆启动制动频繁,运行中产生相当可观的制动能量,利用电动汽车的储能特性和可调度特性,提出一种基于微电网的再生制动能量回馈系统。
(1)为维持接触网电压的稳定,提出一种基于饱和PI调节器的再生制动能量回馈控制,可根据接触网电压快速回馈再生制动能量。
(2)为使电动汽车能够快速充放电平抑制动能量的间歇性和冲击性,使逆变器以恒功率运行,提出一种电压电流双闭环的电动汽车充放电控制策略和基于PR控制器的逆变器恒功率控制。
(3)为避免电动汽车平抑制动能量冲击性和间歇性时发生过充或过放,提出一种基于滞环比较器的协调控制方法。
猜你喜欢
中国应急管理科学(2022年2期)2022-05-23
云南画报(2021年10期)2021-11-24
新能源汽车供能技术(2021年1期)2021-10-14
云南画报(2020年12期)2021-01-18
铁道通信信号(2020年4期)2020-09-21
铁道通信信号(2020年10期)2020-02-07
电子制作(2019年23期)2019-02-23
山东工业技术(2016年15期)2016-12-01
汽车实用技术(2015年8期)2015-12-26
燕山大学学报(2015年4期)2015-12-25
