基于结构一体化的压电尺蠖直线电机设计
2019-04-20 03:16:14应志奇刘文翠惠相君周鹏飞汪家乐孙靖康崔玉国
压电与声光 2019年2期
应志奇,刘文翠,惠相君,周鹏飞,汪家乐,孙靖康,崔玉国
(1. 宁波大学 机械工程与力学学院,浙江 宁波 315211;2. 首信自动化信息技术有限公司,河北 迁安 064400)
0 引言
压电尺蠖直线电机是一种具有毫米级以上运动行程、亚微米级精度、纳米级分辨率的精密驱动器。在生物工程领域,它可以为加工与操作细胞与细胞内物质所需的精密定位系统提供毫米级的工作行程和亚微米级的定位精度[1];在光学工程领域,它可以为精密光学元件的加工以及表面形貌检测提供大行程、高精度的驱动定位[2-3];在IC制造领域,它可以为芯片光刻与封装提供亚毫米级的行程以及纳米级的定位分辨率[4]。
与传统的直线电机相比,压电尺蠖直线电机在众多精密领域具有明显的优势,因此,国内外研究者对此展开了广泛研究。刘建芳等[5]研制出一种推动式压电尺蠖直线电机,可获得的最大箝位力为70 N,静、动态驱动力分别为63 N、47 N,电机的分辨率为40 nm,最大速度为0.24 mm/s;李全松等[6]研制出一种新型爬行式压电尺蠖直线电机,该电机的运动范围为20 mm,可获得的箝位力与驱动力分别为47 N与38 N,电机的分辨率为20 nm,最大速度达到0.48 mm/s;J. Park等[7]研制出一种同时拥有大位移和大推力的压电尺蠖直线电机,可获得的静、动态箝位力分别为2.25 kN与50 N,电机能达到的最大速度为11 mm/s;Peter E.Tenzer等[8]研制出一种新型结构的压电尺蠖直线电机,该电机运动速度最大为0.02 m/s,最大刚度达88 N/μm,推力最大为150 N;Nicolas Ferrier等[9]研制出了一种采用楔形结构作为箝位机构的压电尺蠖直线电机,该电机的最大驱动力为1.5 kN;Edward Williams等[10]设计了一种基于力放大原理的大推力压电尺蠖直线电机,该电机的最大运动行程为220 μm,最大驱动力为39 N。
当前的压电尺蠖电机都是分体式结构,即各部分结构通过装配形成一体,这导致电机的结构不够紧凑;同时,箝位位移、释放位移需通过装配过程中预设的过盈量来保证,这对电机的加工和装配精度提出了较高的要求;而且,电机机体装配往往会降低各组成部分之间的接触刚度,增大阻尼,导致电机的动态响应特性变差[11-12]。
本文以结构简单紧凑、加工与装配精度要求低、箝位机构与驱动机构一体化为目标,设计了压电尺蠖直线电机。
1 电机结构设计及运动原理
1.1 结构设计
基于结构一体化的构想,本文设计的压电尺蠖直线电机如图1(a)所示,它由电机机体、释放用压电执行器、驱动用压电执行器、输出轴、箝位机构预紧螺钉、驱动机构预紧螺钉、预紧垫块组成。其中,机体由左、右两结构相同的箝位机构以及驱动机构组成,且箝位机构与驱动机构均为柔性薄板式结构。
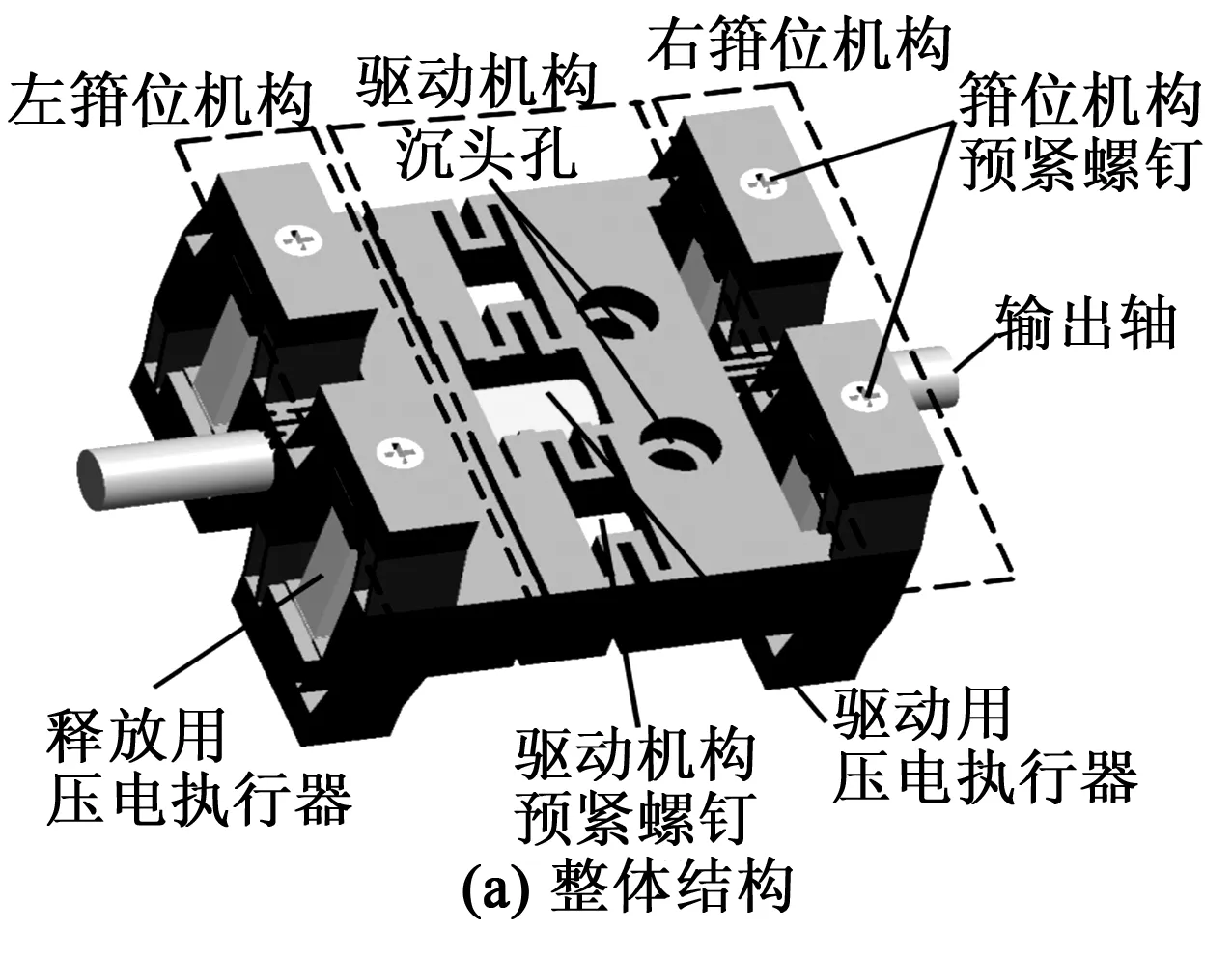
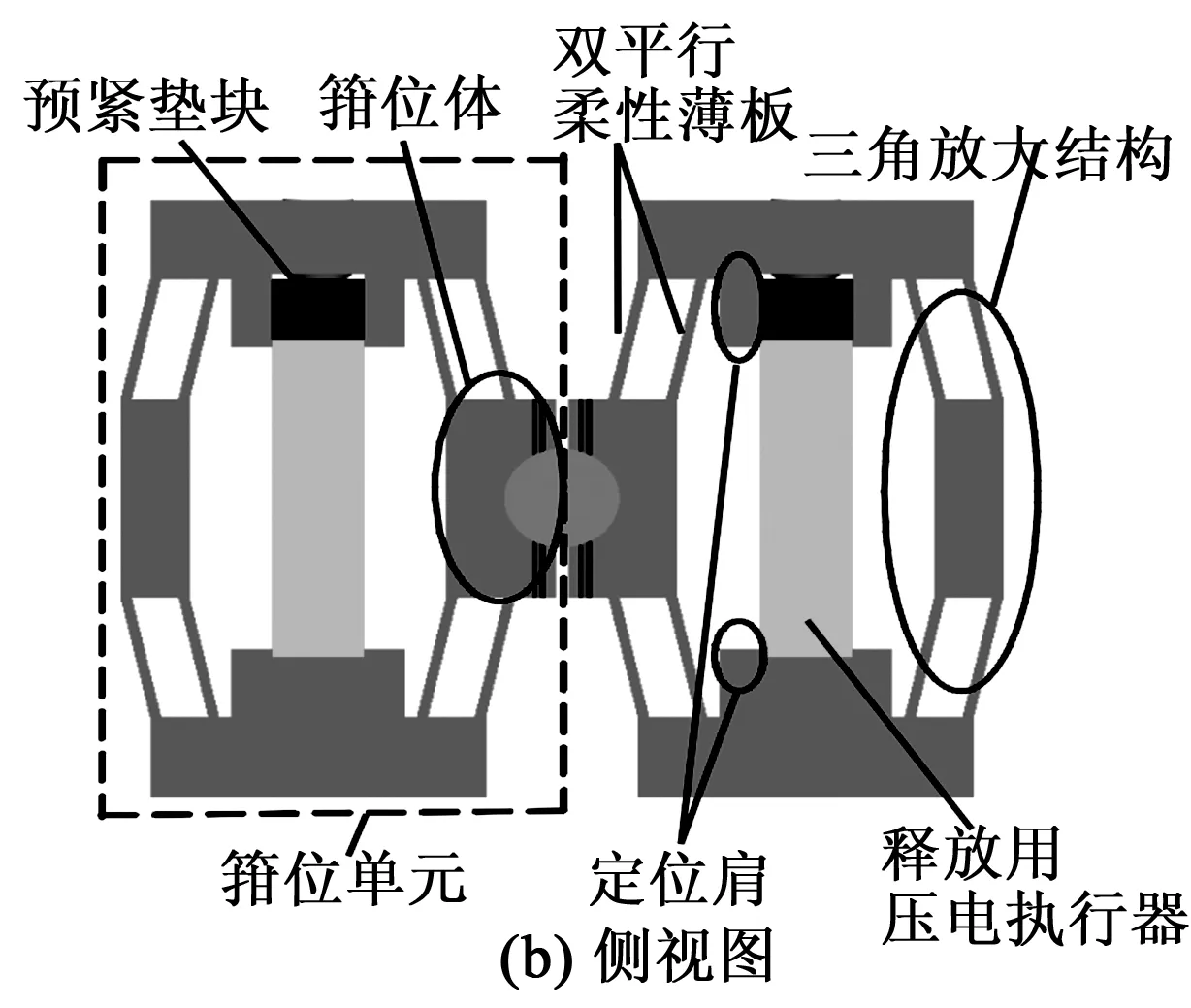
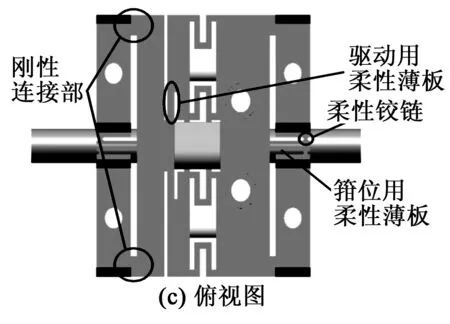
图1 电机三维造型
左、右箝位机构均包括2个箝位单元,它们通过断电箝位、通电释放的方式对输出轴进行交替箝位与释放;而由两组双平行柔性薄板式三角放大结构组成的箝位单元,既可对释放用压电执行器的输出位移进行放大,又可在释放用压电执行器的轴线方向上仅输出平动位移。预紧垫块(见图1(b))可使释放用压电执行器在被预紧时避免受到预紧螺钉的扭矩作用;定位肩可以对释放用压电执行器的安装起到定位作用,提高装配的精度。箝位单元各通过2个刚性连接部和1个箝位用柔性薄板与驱动机构相连接(见图1(c))。
驱动机构带动输出轴进行直线运动,同时将左、右两箝位机构结合于其两端,以实现结构一体化。其中,驱动用柔性薄板用来输出压电执行器的位移;柔性折叠梁同驱动用柔性薄板相结合,二者可在驱动用预紧螺钉的作用下产生预变形,实现对驱动用压电执行器的预紧;驱动机构右侧刚性部分上的沉头孔用来固定电机机体。
由以上各部分结构可知,所设计的结构一体化电机结构简单紧凑,加工及装配难度低,且可实现断电箝位。电机总体尺寸(不包含输出轴)为74 mm×76 mm×60 mm。
考虑到材料对于压电尺蠖直线电机的性能影响,对于电机的机体制作,采用韧性好、弹性高、密度小的航空铝7075-T6;而对于电机输出轴,则采用耐磨性和硬度高的轴承钢40Cr进行制作。
1.2 运动原理
首先在将驱动机构有沉头孔一侧的刚性部分固定的情况下,基于所设计的压电时序(见图2),电机的箝位机构、驱动机构可以交替动作,最终使输出轴实现连续直线运动。
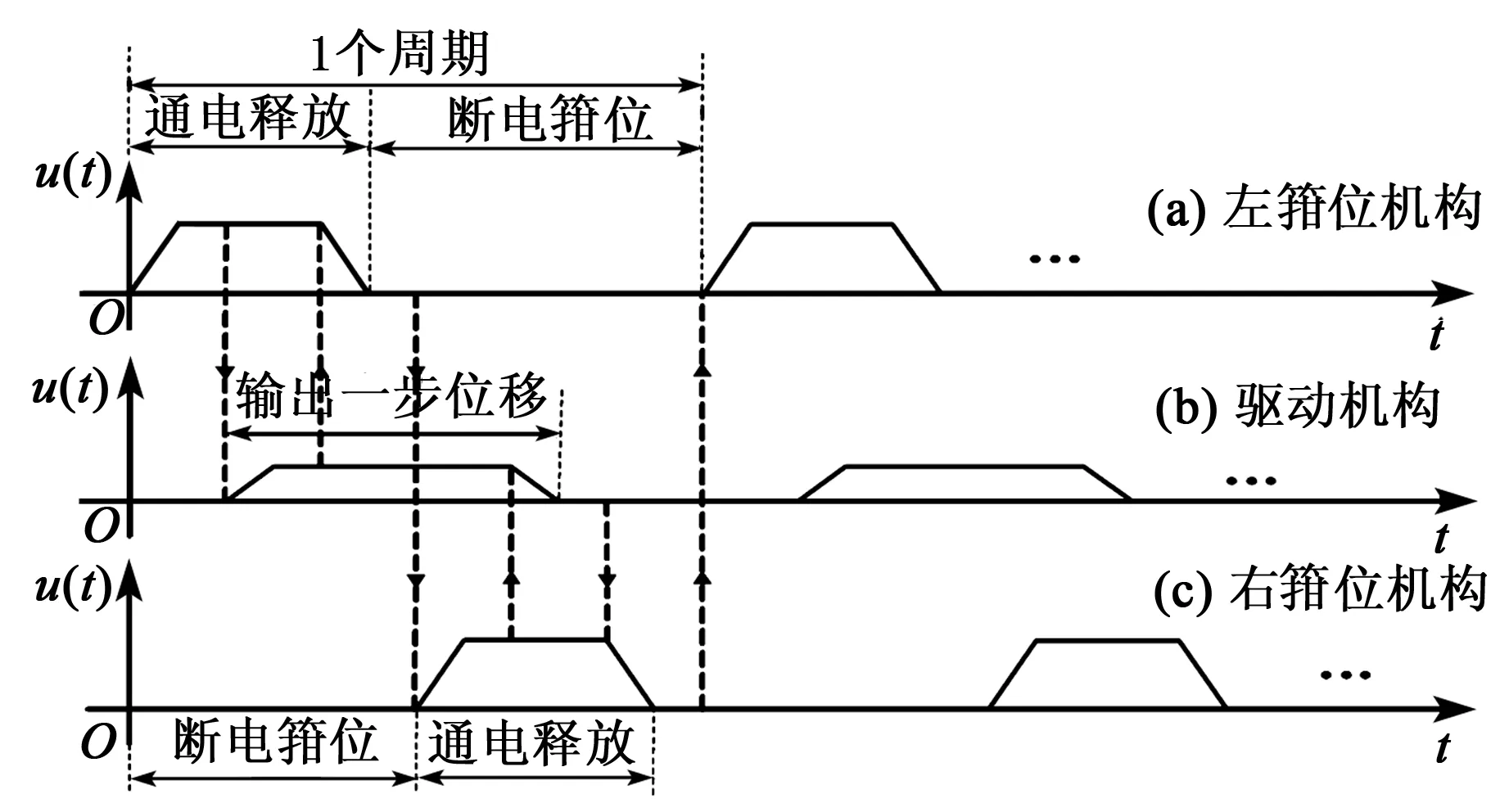
图2 电机的压电控制时序
具体工作过程如下:
a) 对右箝位机构的两释放用压电执行器通电,使得右侧箝位机构释放输出轴。
b) 对驱动用压电执行器通电,使得驱动机构带动输出轴向左输出单步位移。
c) 对右箝位机构两释放用压电执行器断电,使得右箝位机构再次对输出轴进行箝位。
d) 对左箝位机构两释放用压电执行器通电,使得左箝位机构释放输出轴。
e) 对驱动用压电执行器断电,使得驱动机构恢复原状。
f) 对左箝位机构两释放用压电执行器断电,使左箝位机构再次对输出轴进行箝位,此时,电机的箝位机构与驱动机构均恢复到初始状态。
重复a)~f),压电尺蠖电机便连续向左输出直线位移;改变箝位机构、驱动机构的通电时序,则可使电机向右连续输出直线位移。
2 电机特性有限元分析
2.1 箝位机构放大倍数及应力分析
给左箝位机构的两箝位单元上、下刚性部分内表面施加10 μm的位移(上、下各5 μm)。图3为箝位单元位移分析结果。由图可知,在10 μm的输入位移作用下,箝位体沿箝位方向的位移为31.6 μm,可见箝位单元的位移放大倍数为3.16。
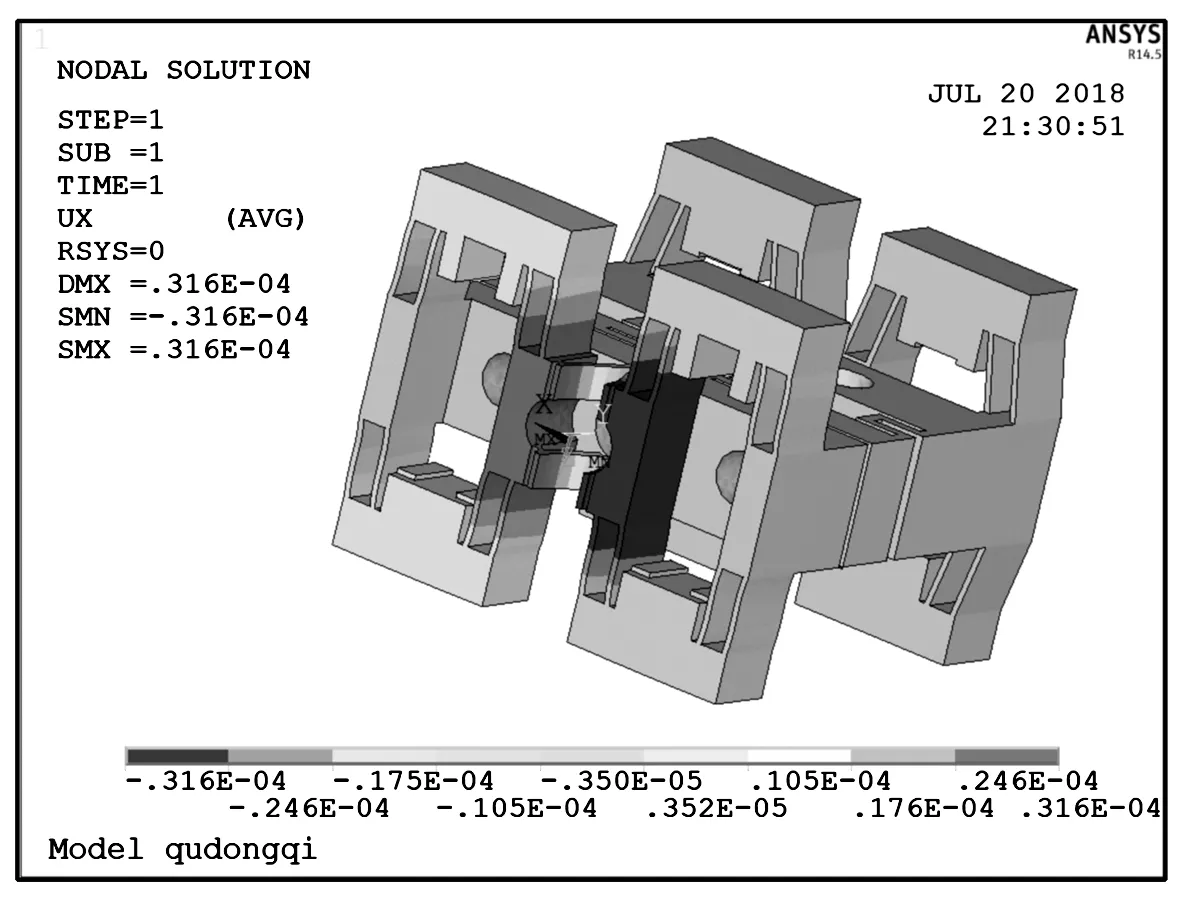
图3 箝位单元位移分析结果
给箝位单元上下刚性部分内表面施加40 μm的输入位移(释放用压电执行器的最大标称位移为40 μm),图4为箝位机构应力分析结果。由图可知,箝位单元最大应力为178 MPa,远小于电机机体所用材料铝合金7075的许用应力(为540 MPa),所以,箝位机构在应力方面完全满足要求。
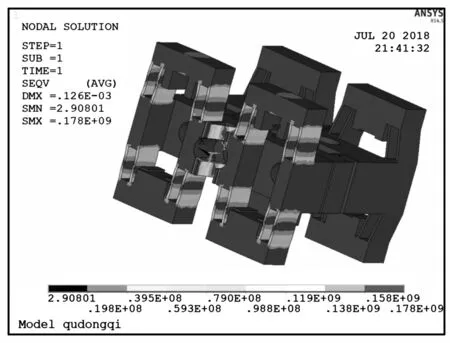
图4 箝位机构应力分析结果
2.2 驱动机构应力分析
给同驱动用压电执行器相接触的驱动机构左侧内端面施加100 μm的位移。图5为驱动机构应力分析结果。由图可知,驱动机构产生的应力为206 MPa,小于电机机体所用材料铝合金7075的许用应力。100 μm的变形,完全能够满足驱动用压电执行器装配及预紧变形的要求。
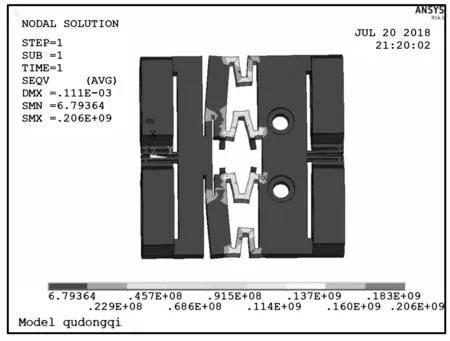
图5 驱动机构应力分析结果
2.3 机体模态分析
图6为电机机体前6阶模态的振型与固有频率。其中,图6 (a)为非固定端箝位机构绕y轴做纵向俯仰振动,图6 (b)为非固定端箝位机构绕z轴做水平摆动振动,图6 (c)为非固定端两个箝位单元沿与箝位方向相反的方向做水平摆动振动,图6 (d)为固定端单个箝位单元沿与箝位方向相反的方向做水平摆动振动,图6 (e)为固定端单个箝位单元沿箝位方向做水平摆动振动,图6 (f)为非固定端箝位机构绕x轴做顺时针扭转振动。由图可知,机体具有足够高的共振频率,抗震性较好。
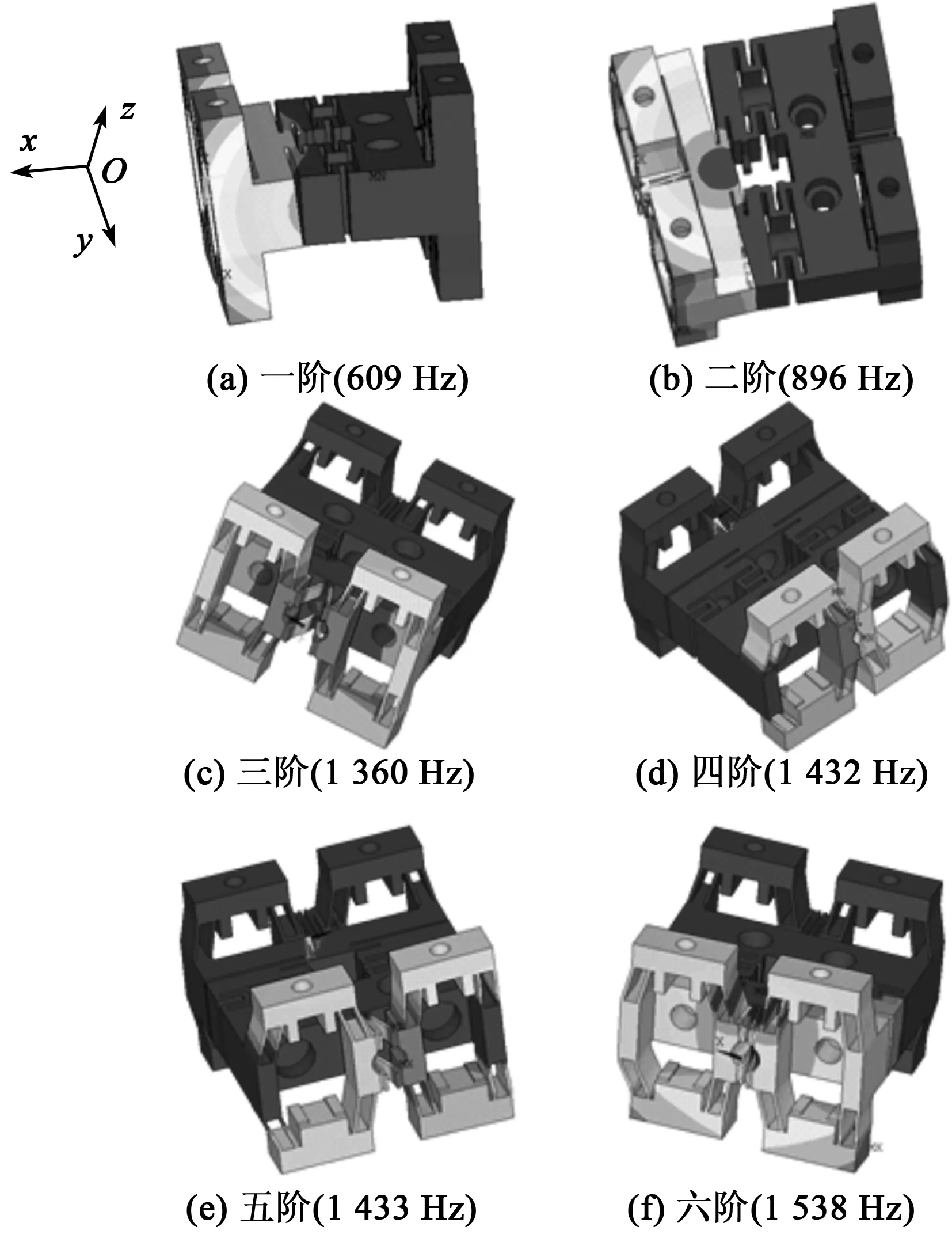
图6 机体振型及固有频率的分析结果
3 电机特性测试
3.1 实验系统构成
图7为测试压电尺蠖直线电机位移特性的实验系统。该实验系统由激光位移传感器、计算机、压电执行器驱动电源、包含模数转换(A/D)和数模转换(D/A)的多功能数据卡、电机机体、手动平移台组成。位移特性测试实验过程如下:首先,为使激光位移传感器处于测量范围内,对手动平移台进行相应的调节;然后,计算机输出所需要的驱动电压信号,经多功能数据卡上的D/A转换器转换成模拟电压后施加到压电执行器驱动电源上;接着,压电执行器驱动电源将模拟电压进行放大,并施加于压电执行器上使其输出微位移,进而电机在压电执行器的作用下也产生相应的微位移;最后,激光位移传感器检测到该微位移,并由多功能数据卡的A/D转换器转换后采集到计算机内。
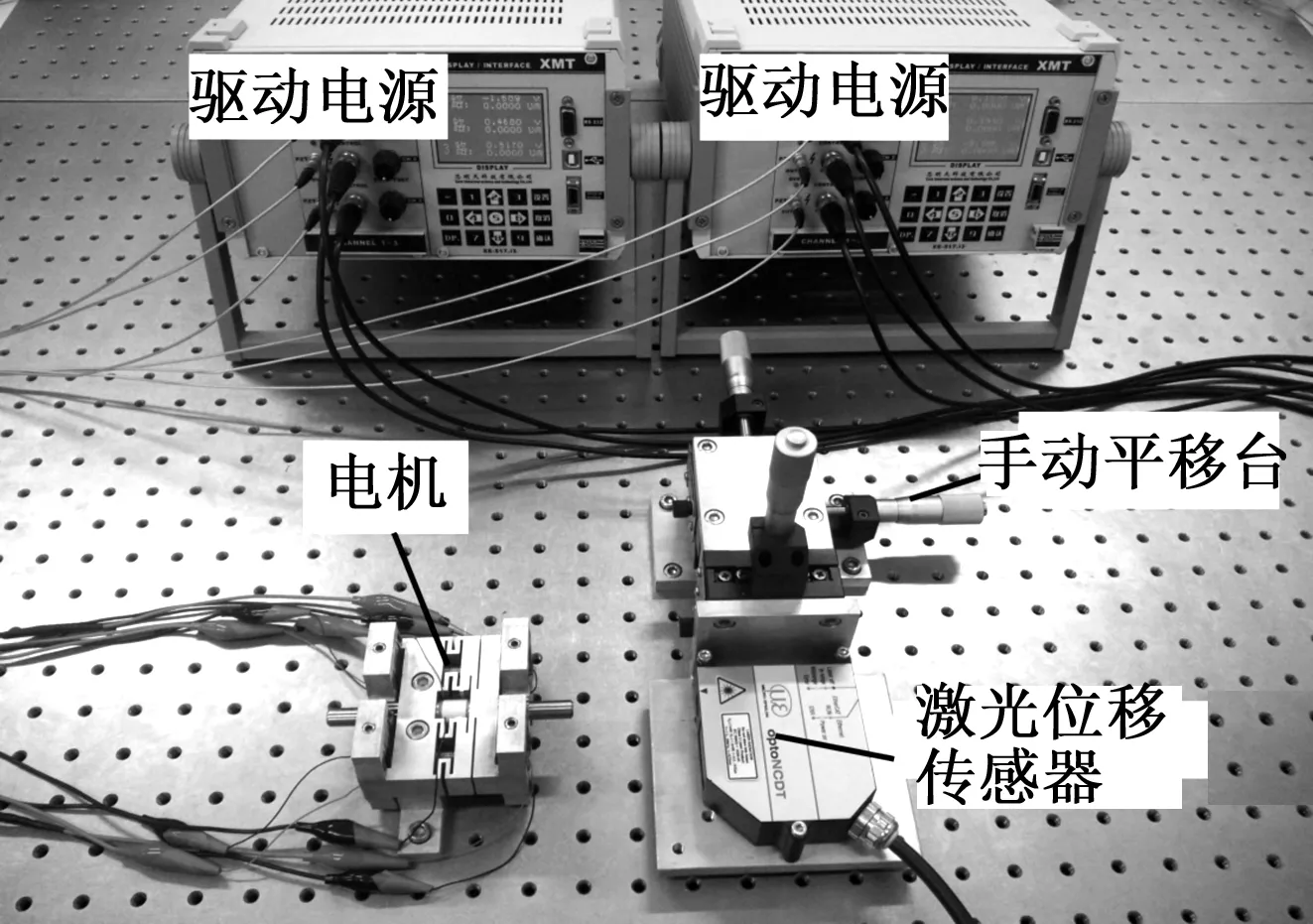
图7 电机位移测试系统
3.2 箝位机构位移测试
给箝位机构的释放用压电执行器施加0~120 V~0的三角波电压,测量箝位机构沿释放用压电执行器轴线方向的位移;然后在释放用压电执行器的预紧状态下,再给其施加0~120 V~0的三角波电压,测量箝位机构沿箝位方向的位移。图8为箝位机构位移图。由图可得,箝位机构沿释放用压电执行器轴线方向与沿箝位方向的最大位移分别为20.55 μm、62.63 μm。结合箝位机构沿释放用压电执行器轴线方向的位移特性,箝位单元的实际位移放大倍数为3.05。
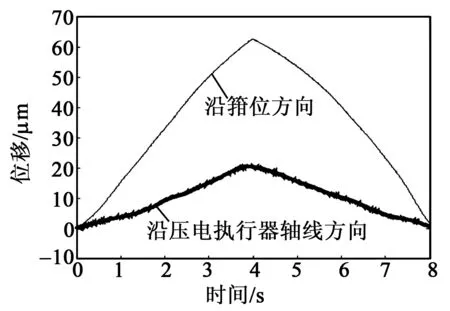
图8 箝位机构位移
3.3 驱动机构位移特性测试
给驱动用压电执行器施加0~120 V~0的三角波驱动电压,测量驱动机构的位移特性。图9为驱动机构位移图。由图可得,在0~120 V~0电压作用下,驱动机构的最大输出位移为8.24 μm。
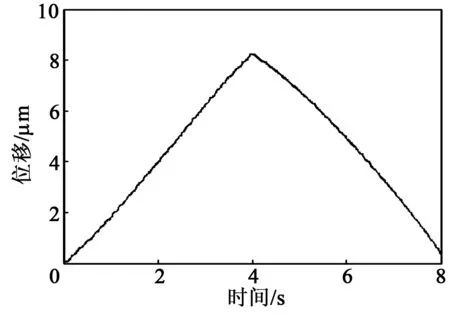
图9 驱动机构位移
3.4 电机连续位移测试
在20 Hz的电机控制时序频率下,给释放用压电执行器施加幅值恒为120 V电压,而给驱动用压电执行器分别施加幅值为7.5 V、15 V、30 V、60 V、90 V、120 V电压,测量电机在20 s内所输出的连续位移。图10为电机连续位移图。由图可得,电机的连续位移具有良好的线性,原因是在电压频率不变的情况下,压电执行器的伸长量与电压幅值呈线性关系,在恒定的电压作用下,压电执行器的伸长量相对稳定,因此,带动电机运动的单步位移也相对稳定,而电机的连续位移是由单步位移累加起来的,故而表现出良好的线性。
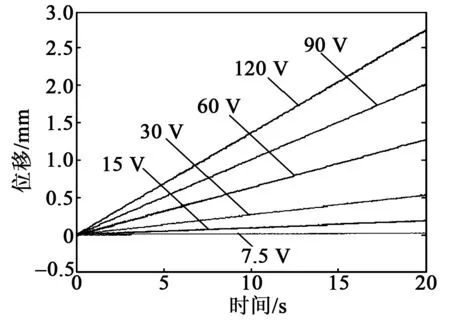
图10 电机连续位移
3.5 电机的速度测试
在电压频率分别为1 Hz、5Hz、10 Hz、20 Hz、30 Hz、40 Hz、50 Hz、60 Hz的情况下,给释放用压电执行器施加幅值恒为120 V的电压,而给驱动用压电执行器分别施加幅值为60 V、90 V、120 V的电压,测得电机的速度与频率关系如图11所示。
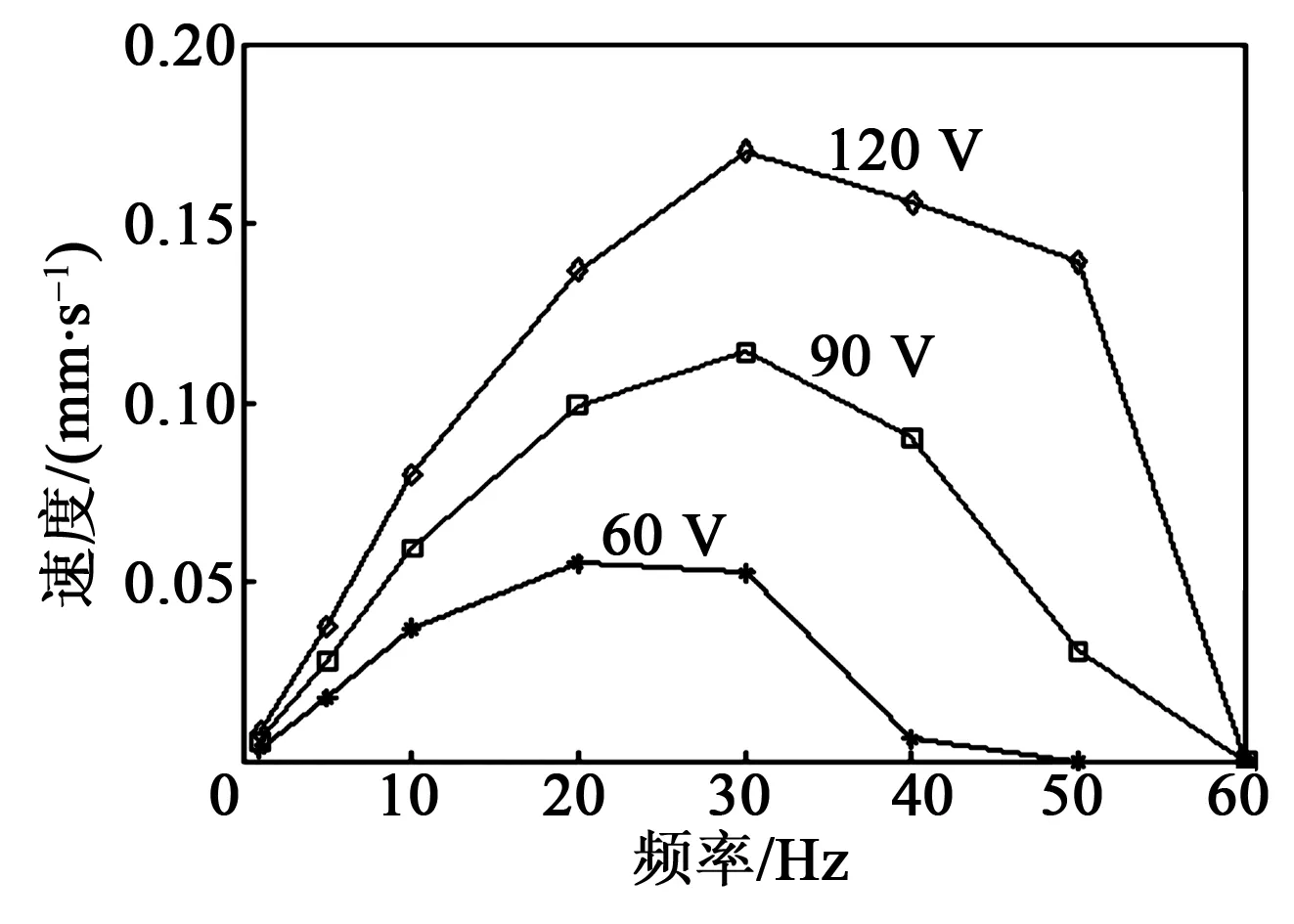
图11 电机的速度与频率关系
由图11可看出,在频率相同时,电机的速度随着驱动电压幅值的增大而增大; 而在驱动电压幅值相同的情况下,当时序频率小于30 Hz时,随着时序频率的增大,电机的运动速度也随之增大,当时序频率超过30 Hz时,随着时序频率的增大,电机速度却随之减小;当幅值为120 V、时序频率为30 Hz的电压作用于驱动用压电执行器上时,电机的速度达到最大值0.17 mm/s。
3.6 电机的分辨率测试
在电机的一个运动周期内,给其固定端箝位机构的压电执行器施加幅值为120 V的梯形波电压,驱动用压电执行器施加可使输出轴产生最小位移的阶梯波电压(0.9 V)。图12为电机位移分辨率。由图可得电机的位移分辨率为10 nm。
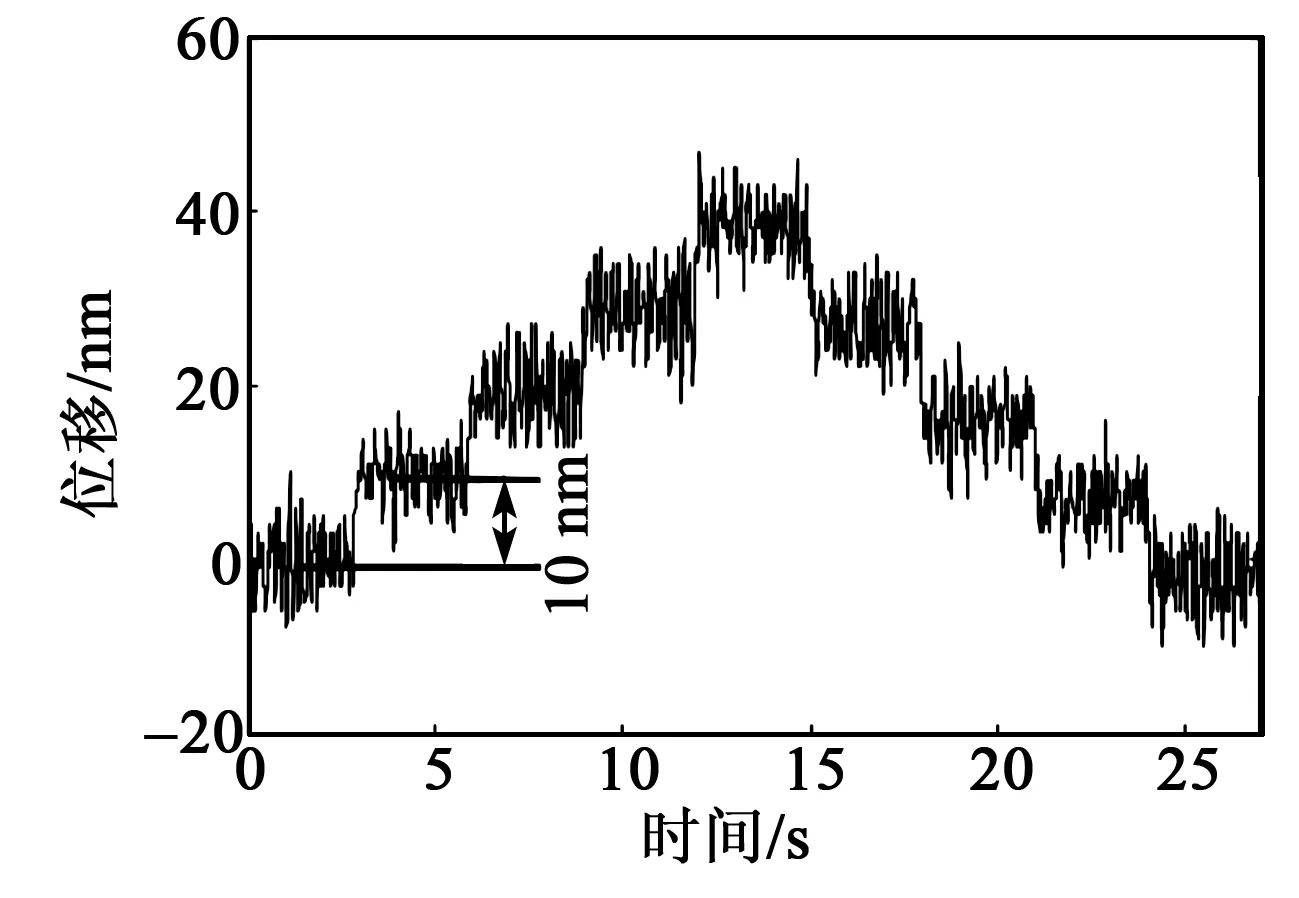
图12 电机位移分辨率
4 结束语
本文设计了一种结构一体化式压电尺蠖直线电机,该电机将箝位机构与驱动机构集成于一体,简化了电机的装配与调节过程,降低了对机体加工、装配的精度要求,并可实现断电自锁。采用有限元仿真方法分析了电机的静、动态特性。通过相应的实验测试了电机的运动特性,实验结果表明,电机箝位机构的最大箝位位移为62.63 μm,位移放大倍数为3.05倍;驱动机构的最大输出位移为8.24 μm;在最大驱动电压120 V作用下,电机的最大运动速度为0.17 mm/s;电机的分辨率为10 nm。
猜你喜欢
浙江农业学报(2020年8期)2020-08-30 12:38:28
测控技术(2018年12期)2018-11-25 09:37:50
电机与控制学报(2018年9期)2018-05-14 13:31:19
制造技术与机床(2017年9期)2017-11-27 02:13:45
自动化学报(2016年8期)2016-04-16 03:38:51
自动化学报(2016年5期)2016-04-16 03:38:49
电测与仪表(2016年17期)2016-04-11 12:39:34
通信电源技术(2016年5期)2016-03-22 01:09:45
火控雷达技术(2016年3期)2016-02-06 02:30:40
新疆农垦科技(2014年5期)2014-02-28 19:19:59