具有陀螺定向功能的伺服平台设计与误差分析
2019-04-20 03:16:12邓劲松魏贵玲王俊杰朱仕杰
压电与声光 2019年2期
邓劲松,魏贵玲 ,王俊杰,樊 雷,朱仕杰,王 斌
(1.中国电子科技集团公司第二十六研究所,重庆 40006;2. 成都中电锦江信息产业有限公司,四川 成都 610051)
0 引言
现代战场攻防对抗日益激烈,单一模式的侦察系统受地形和全天候条件的影响无法满足复杂背景下准确截获、跟踪目标的要求。运用雷达、电荷耦合器件 (CCD)可见光和红外等探测器进行多模复合侦察具有较明显的优势。雷达作用距离远,CCD和红外图像处理对运动目标跟踪精度高,多模复合侦察已成为准确获取情报的最佳手段。
多模侦察系统的承载平台又称随动系统,其工作原理是:多模探测器通过信号处理分辨出移动目标,然后将目标与探测中心点的角度偏差数据传给伺服平台。平台控制器进行处理后控制承载平台转动,使雷达、CCD或红外摄像机的电轴或光轴瞄准目标,实现同步自动跟踪。本研究的伺服平台是跟踪系统的骨架,其误差大小直接影响侦察系统的性能。
1 伺服平台构架
1.1 平台结构组成
传统的伺服系统由控制机箱和伺服平台两部分组成,控制机箱为车内设备,伺服平台为车外设备,它们之间通过电缆连接。本文的伺服平台安装在升降杆上,若采用分离架构的安装形式,工作时升降高差跨度大,导致整体性差、电缆长、可靠性低的问题。为了克服这种缺陷,经分析和综合比较,设计一种U型框架整体结构式伺服平台,平台方位转动范围为360°连续,俯仰角为-10°~90°。根据平台承载的雷达、CCD光学仪器的使用情况,伺服平台由方位和俯仰构成双轴系统,方位轴在U型框架的最下端,其上支承的是俯仰轴,为了降低不平衡力矩,减小驱动力,设计时将U型框架上的载荷重心尽量设计在转动中心。平台由方位电机、方位角度传感器、控制电路、俯仰电机、减速器、俯仰角度传感器和高精度寻北仪等组成,其结构布局如图1所示。
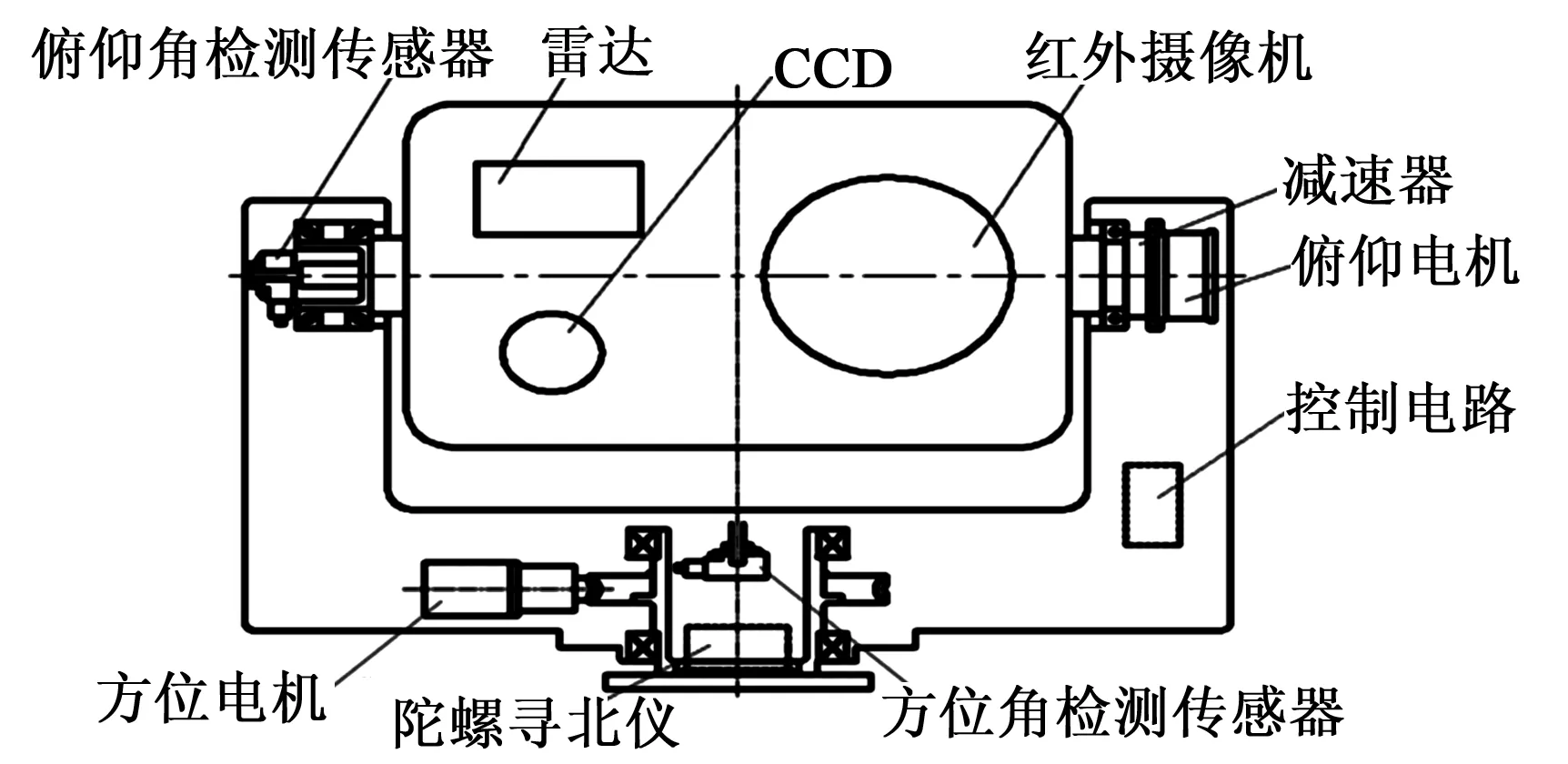
图1 伺服平台结构布局图
1.2 陀螺寻北仪
为了提高侦察设备的综合作战性能,欧美等发达国家在各种军用侦察系统中装备陀螺定向装置。我国一直很注重新装备军事技术的发展,对系统集成技术提出了更高的要求。90年代,我国自主研制的陀螺寻北定向装置逐渐全面替代传统的磁罗盘或光学仪器。基于挠性陀螺的寻北定向装置已大量应用于雷达车、侦察指挥车及发射车等系统。挠性陀螺的基本原理已有阐述,如在挠性陀螺寻北仪二位置寻北方案中提出,利用陀螺仪敏感在相差180°的两个方向上的地球自转角速率分量,准确解算出地理真北方向与陀螺轴向的交角,从而实现寻北的方案[1]。该方案采用高精度转位对消了陀螺常值漂移,降低了对陀螺精度的要求。在二位置陀螺寻北仪静态误差分析中[2],进一步地对寻北仪的静态误差源进行了讨论,给出了一种静态误差分析法和误差模型,得到了较规律的误差源,为提高寻北精度奠定了基础。
随着光纤陀螺技术的发展,光纤陀螺以其寿命长,可靠性高,抗振动冲击能力强和机动性强(可瞬时启动,无关机延时)等显著优点逐渐应用于陀螺寻北仪中。国内文献提出采用四位置法、多位置法和连续旋转法等开展光纤陀螺寻北仪技术研究。四位置法寻北原理是在4个方向(相差90°)敏感地球自转角速率分量,通过计算来消除光纤陀螺零偏和漂移趋势项,解算出光纤陀螺寻北仪基准轴向与北向的夹角,这种寻北方式的可靠性高。本文的光纤陀螺寻北仪为伺服平台提供高精度的指向信息,伺服平台采集北向数据后,与转动方位角融合得到雷达或CCD的指向信息,再通过上位机将指向角传输出去。
2 平台轴系误差分配及有限元分析
多模侦察系统的测量误差有:
1) 雷达、CCD和红外探测器等载荷本身的测量误差。
2) 载荷电轴或光轴基准相对于伺服平台基准零位的安装误差。

伺服平台是雷达或光学载荷主体承载部件的骨架。系统机械轴系误差与U型框架的结构刚性强度有关。为了满足恶劣环境车载长期使用后的高精度,查阅相关资料,分析结果表明,用于汽车或摩托车发动机的航空用铸铝ZL101A材料,其机械强度较弱,不太适合制造成高强度的负载体;LY12硬铝的机械强度高于ZL101A,加工性能也好,适合制造成高负荷的零件;航空用材LD10号锻铝,其硬度与LY12相当,但其抗拉强度、屈服强度,伸长率较好。3种材料特性对比如表1所示,由表可知,航空用材LD10号锻铝作为U型框架结构材料,可以满足恶劣野外环境使用要求。
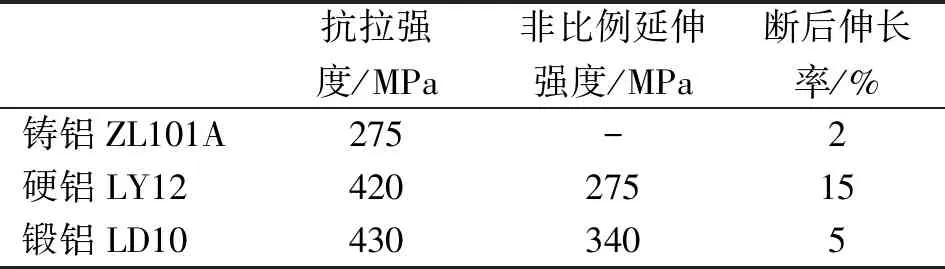
表1 材料特性对比表
伺服平台安装在升降杆上,系统要求承载能力强,自身质量及变形量小,如图2所示。为了满足高刚性强度和高精度的使用需要,通过采用加强筋、钻孔减重等方法,建立平台三维模型,进行ANSYS有限元分析、网格分析及模态分析等得到优化的U型框架结构。伺服平台采用锻件―失效―粗加工―失效―再粗加工―失效―检验―精加工―检验的工艺路线,在加工误差、应力消除和装配误差方面进行研究,有效保证结构件的力学性能和精度稳定性。最后,将电源模块、电机、驱动器等电气部分安装在伺服平台里,构成伺服系统。
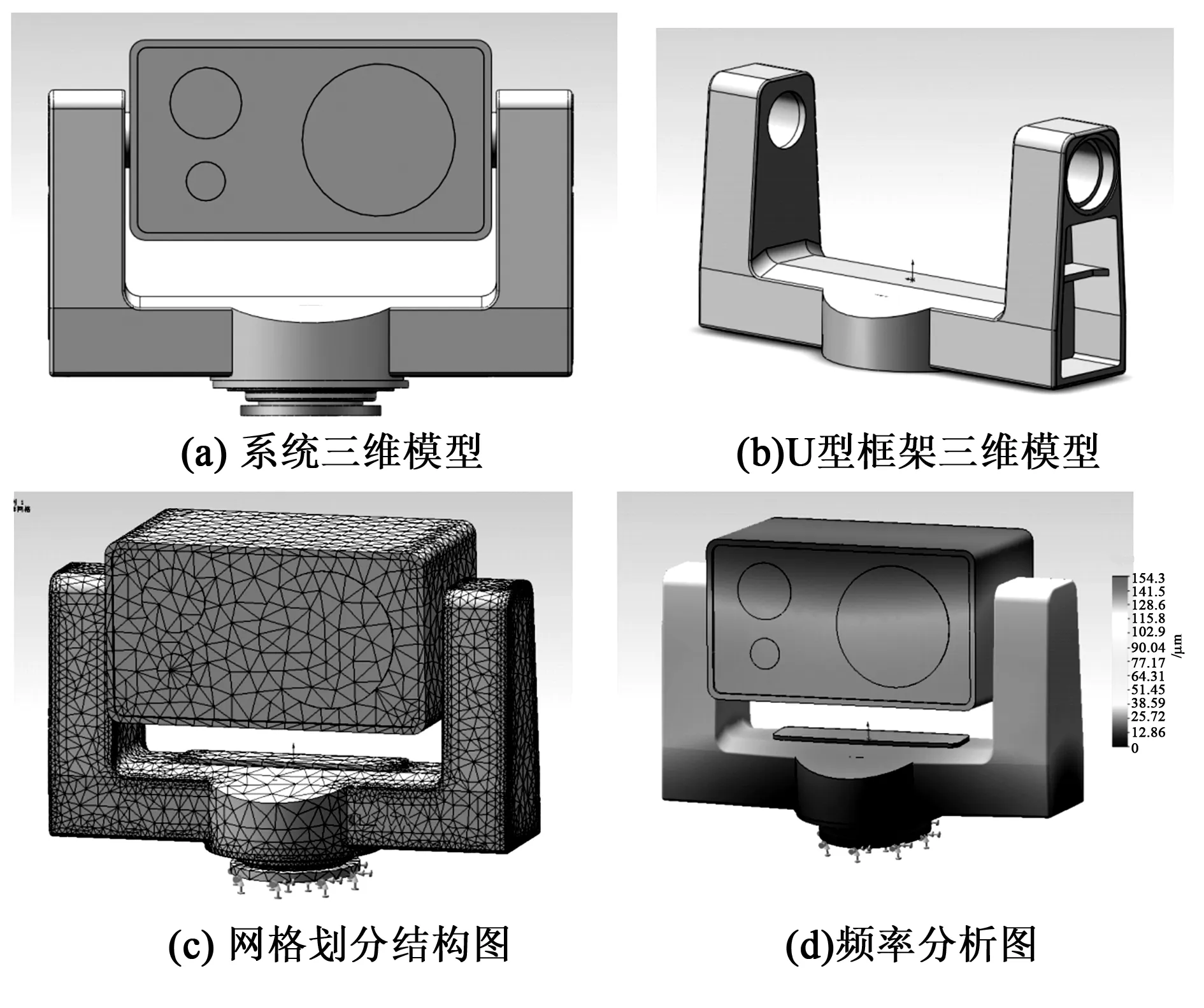
图2 平台结构有限元分析图
3 试验结果
为了验证伺服系统的精度,采用多组平行光管组成天顶仪作为测试仪器。如图3所示,水平方向布置了8个平行光管,俯仰方向布置9个平行光管,作为测量的基准点,伺服平台安装在水平中心点,其上架设1个伺服平行光管。测量时,调节好伺服平行光管,使其与水平基准点在同一水平面,分别转动伺服平台的方位和俯仰角,得到伺服平台与各基准点的差值,即为方位和俯仰角度误差。
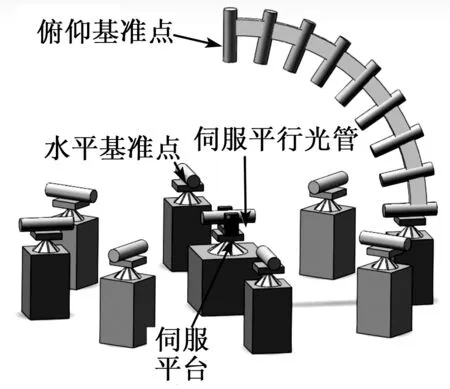
图3 天顶仪组成示意图
测量垂直轴回转误差时,伺服平行光管的光轴瞄准水平0°起点的基准点,然后每隔45°转动伺服平台,测量转动后伺服瞄准点与水平基准点的误差。测量水平轴回转误差时,每隔10°沿俯仰方向转动伺服平台,测量转动后伺服瞄准点与俯仰基准点的误差。测量正交度时,以水平基准点为0°为起点,伺服平行光管分别对准90°和270°位置的水平基准点,然后调整伺服平台的基座使其逼近大地水平,即垂直轴系为铅锤[4]。转动伺服平台的俯仰角,记录每次俯仰相对于铅锤线的水平偏差,其最大值就是正交度误差为14″,测试数据如表2所示。
图4为采用正弦曲线平滑模拟得到误差曲线。由图可知,垂直轴回转误差为14.3″,水平回转误差为17.2″,经计算测量到的机械轴系误差为28.22″,满足总体分配要求。
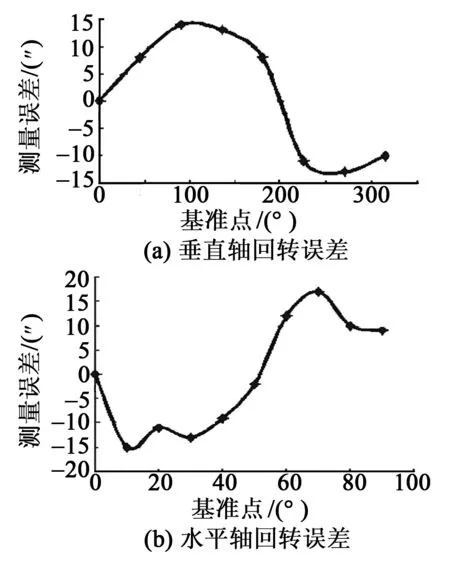
图4 误差曲线
4 结束语
本文设计的具有陀螺寻北定向功能的U型框架结构平台,在伺服系统中得到应用。伺服系统在野外环境使用多年,其性能稳定,满足车载高精度侦察跟踪系统的需要。
猜你喜欢
科学技术与工程(2023年22期)2023-08-23 07:17:58
华中建筑(2022年4期)2022-04-14 07:50:52
机电工程技术(2021年6期)2021-07-25 15:46:54
现代测绘(2021年1期)2021-04-28 10:19:56
小学生学习指导(低年级)(2019年10期)2019-10-16 08:12:34
学生天地(2019年6期)2019-03-07 01:10:46
军事文摘(2018年24期)2018-12-26 00:58:18
快乐语文(2018年36期)2018-03-12 00:56:02
重庆建筑(2015年12期)2015-11-19 07:32:48
山西建筑(2014年36期)2014-08-08 02:13:37