基于电动汽车电机控制器的传感处理电路及控制策略的研究
2019-04-18 07:55戚金凤
汽车实用技术 2019年7期
戚金凤
基于电动汽车电机控制器的传感处理电路及控制策略的研究
戚金凤
(广州科技职业技术学院,广东 广州 510550)
随着人们生活水平的不断提高,利用汽车作为代步工具的需求逐渐加大,传统燃油汽车带来的环境污染问题也越来越引人关注,因而节能环保的新能源汽车受到了很大的重视,纯电动汽车和混合动力汽车得到广泛的应用和普及,电机控制器成为新能源汽车的一个新研究领域。文章针对纯电动汽车电机控制器的传感器及其处理电路,电机转速控制策略进行了进入研究。首先介绍直流电机控制器的组成,然后描述了直流电机控制器的传感器及其处理电路,并根据传感信号研究直流电机的转速控制策略。最后通过matlab simulink软件对电机的转速控制策略进行仿真试验,试验结果良好。
电机控制器;电动汽车;控制策略;控制器;传感器
前言
随着社会的不断发展和人类生活水平的不断提高,环保和能源成为人类的最关注的问题,为了解决该问题,汽车生产厂商逐渐放弃传统燃油汽车的开发,转而研制开发更环保、更节能、零排放的新能源汽车,而纯电动汽车和混合动力汽车成为这些汽车厂商的主要研究方向。纯电动汽车的动力系统主要由动力电池、充电器、电机及其驱动控制器组成;混合动力汽车是以油电混合的形式提供两种或两种以上的能量源输出,其动力系统既有纯电动汽车的结构也有传统燃油汽车的结构,在电池能量不足的情况下转为内燃机发电补充。这两种汽车的车轮驱动都是通过电机来完成,因此,电机及其驱动控制器必不可少的核心部件,而研究电动汽车电机控制器的传感器及其处理电路、电机转速控制策略对电机控制器具有非常重要的意义。
1 电机控制器的组成
电机控制器主要由驱动器(Driver)、功率变换模块(Po -wer Converter)、电机控制模块(Electronic Controller)、三部分组成。
驱动器是将微处理器对电机输出的控制信号转换为功率变换模块需求的大电流驱动信号,并实现强弱信号的电气隔离,增强抗干扰能力。
功率变换模块的作用是将能量存储装置提供的高压直流电变换成适合牵引电机运行的电源形式, 是对电机电流的控制,以实现电机的不同转速。一般由输入滤波器、功率母线、功率开关拓朴、驱动电路和输出滤波器组成。其中, 用于直流驱动系统的功率变换器一般称为斩波器[1],其中关键是开关功率器件,常用的功率器件有功率场效应管、大功率晶体管、晶闸管、绝缘栅双极晶体管和智能功率模块等。
电机控制模块包含硬件电路和相应的软件,硬件电路主要包括微处理器及其以该处理器为核心组成的外围电路,外围电路有监测电机电流、电压、温度、转速的传感监测电路,以及数据交换通信电路。软件是根据不同类型电机的特点实现相应的控制算法的程序。
电机控制器的硬件是控制电机的载体,是以单片机为核心组成的电子电气电路,通过各种传感器和开关信号,监测判断驾驶员的意图和汽车的运行状况,通过控制策略的逻辑判断,输出控制信号,完成对电机的控制,同时,还要实现数据通信和对关键元器件的保护功能。
电机控制器整体框图如图1所示,该控制器由输入装置、单片机和输出装置组成。输入装置由加速踏板位置传感器、电机温度传感器、驱动器温度传感器、电机电流检测器、蓄电池电压检测器、电机转速传感器、点火开关和挡位开关等组成;输出装置是由驱动器、指示灯等设备组成。单片机选择飞思卡尔S9KEA128P80M48SF0处理器,该处理器是飞思卡尔半导体公司最近新出的电机控制微处理器,是一种高性能、低功耗电机32位微处理器。该处理器运行速度快、功耗低、抗干扰能力强、可靠性及性价比高,内部集成了 PWM 信号产生电路,其输出的 PWM 信号可灵活控制电机,应用广泛。
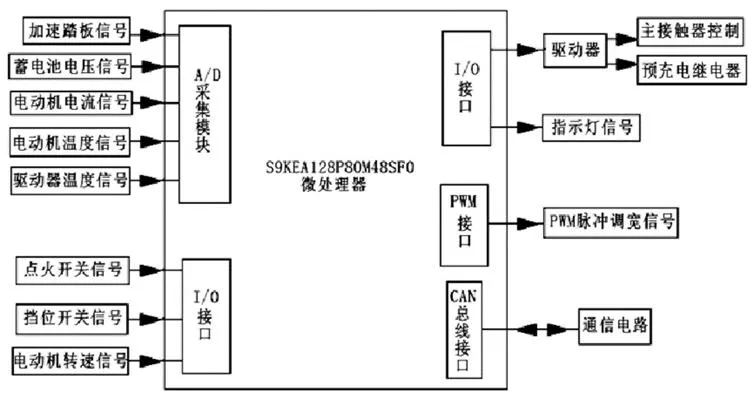
图1 电机控制器整体框图
2 电机控制器的传感器及其处理电路
2.1 加速踏板位置传感器处理电路
加速踏板位置传感器是采用两个接触式的滑动电位器,每个滑动电位器是由电阻和滑动触点组成,电阻固定,滑动触点随加速踏板一起运动,滑动到不同的位置对应不同的电阻,从而产生不同的电压,由两个滑动电位器组成的加速踏板位置传感器随加速踏板的开度同步线性变化,两个输出信号为2倍关系,提高了踏板冗余度。图2(a)为加速踏板位置传感器内部电路图,图2(b)为两个输出信号随踏板开度的线性变化图。

图2 加速踏板位置传感器
图3为信号输出P1的加速踏板位置传感器处理电路,图中电阻R1、C1与运算放大器LM324组成有源低通滤波器,滤除度高频信号干扰,其截止频率为:

根据式(1)计算,R1的电阻值选取1K,C1的容量选取1uF,所以该滤波器的截止频率为159.235HZ,运算放大器LM324输出信号的一部分反馈回其负输入端,组成了电压跟随器,既隔离了输入端和输出端,又具有低阻抗,满足微处理器的输入要求。稳压二极管D1选取稳压值为4.5V的IN4747,与电阻R2、C2组成稳压电路,防止瞬间电压超过5V而损坏单片机内部的A/D模数转换器。
图3 加速踏板位置传感器处理电路
2.2 电机温度和驱动器温度采样电路
电机和驱动器的温度过高会影响器件性能的正常发挥,甚至损坏元器件,因此需要温度传感器采样温度信号,温度传感器是由负温度系数热敏电阻制作而成,该电阻是由具有半导体特性的金属氧化物组成,本文针对NTSD1XH103F型负温度系数热敏电阻进行研究,它在某一温度点对应的电阻RT的阻值公式如下:

式(2)中:
RT为周围温度(绝对温度)在T时的电阻值;
RN为周围温度在TN时的电阻值;
B 为热敏电阻的材料常数。
根据公式计算,该热敏电阻在-50℃至250℃范围内的电阻值如图4所示,由图可知,温度为-20℃---130℃区间,电阻值与温度接近线性关系,满足监测电机和驱动器温度的要求。图5所示为其中一组的温度采样处理电路,电阻R1起分压作用,电容C11起滤波作用,端口output将信号电压送至单片机的A/D模数转换模块。热敏电阻安装在电机接线端子附近,另一个热敏电阻安装在驱动器的功率管散热片上。

图4 电阻值与温度接近线性关系

图5 温度采样处理电路
2.3 电机电流采样电路
为了避免电机电流过大而损坏线圈绕组,需要对电机电流进行检测,本文选取ACS772霍尔电流传感器,该传感器是应用霍尔效应制作的传感器。霍尔效应原理是将一块长为l、宽度为b、厚度为d的半导体薄片置于磁感应强度为B的磁场(磁场方向垂直于薄片大面)中,如图6所示,当有电流I流过半导体薄片时,在垂直于电流和磁场的方向上将产生电动势EH,电动势EH表达式[2]为:

式中:RH为霍尔系数,与材料本身的载流子浓度有关;I为电流;B为磁感应强度;d为霍尔元件的厚度。

式(4)中KH为霍尔元件灵敏度系数,它与材料的掺杂浓度和几何尺寸有关。根据公式(4)可得出以下结论:
①若I不变,B变化,EH将正比于磁感应强度B;
②若B不变,I变化,EH将正比于电流I;
③若I变化,B变化,EH将正比于磁感应强度B和电流I的乘积。
ACS772霍尔电流传感器是利用结论②的原理制作的,它是汽车级别的200KHz频率带宽的电流传感器IC,主要由靠近芯片表面铜制电流通路和精确的低偏置线性霍尔感应电路等组成,被测的电机电流流经由引脚IP+与IP-的铜制电流通路后会产生磁场(如图7(a)所示),该磁场能够被片内的霍尔IC感应出来并将其转化为成比例的电压信号,该电压与被测电流的关系如图7(b)所示。该传感器在25℃时,电流与感应电压呈最精确的线性关系,它采用5V供电,它对电机的电流检测范围是:50A---400A,其导电路径内部电阻仅为 100μΩ,功率损耗极低,满足对电机的检测需求。
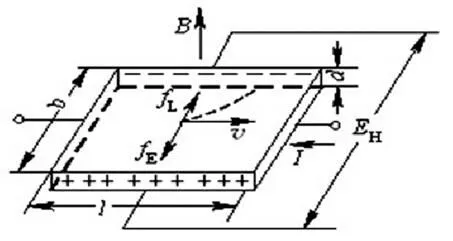
图6 霍尔效应原理

图7 霍尔电流传感器及特性图
图8为电机电流采样电路,由运算放大器LM321组成的反向比例运算放大器对霍尔电流传感器输出的电压信号进行放大,以满足微处理器中的A/D转换器的信号输入要求。霍尔电流传感器输出的电压信号通过电阻RF送入运算放大器的反向输入端,经放大后反相输出,输出信号的一部分经反馈电阻R3反馈给运算放大器的反向输入端,形成闭环控制,以增加输出信号和输入信号的线性关系,增强运算放大器的工作稳定,输出信号和输入信号比例关系可由公式计算:
流过RF的电流:
IF= (VIOUT-V-) / RF(5)
流过R3的电流:
IR3= (V--Vout) / R3(6)
由于反相比例运算放大器具有“虚短”的特点,所以

求解上面(5)(6)(7)(8)中的代数方程得:

由此可见,输出信号和输入信号的放大倍数关系为21.5 -0.3VIOUT。可满足微处理器对电机电流采样电路的需求。
图8 为电机电流采样电路
2.4 电机转速采样电路
对电机的转速进行检测可应用霍尔转速传感器、光电转速传感器、磁电转速传感器。由于霍尔转速传感器有结构牢固、体积小、重量轻、寿命长、安装方便等优点,因此本文对霍尔转速传感器及其采样电路进行分析研究。

图9 霍尔转速传感器结构
霍尔转速传感器是根据霍尔效应原理制作的开关型传感器,如图9所示,它将磁性转盘的输入轴与电机输出轴相连,磁性转盘跟随电机输出轴转动,固定在磁性转盘附近的霍尔开关集成传感器便可在每一个小磁铁通过时产生一个相应的脉冲(开关),检测出单位时间的脉冲(开关)数,便可知道电机输出轴的转速,磁性转盘上的小磁铁数目的多少,将决定传感器的分辨率,其频率和转速成正比。脉冲信号的周期与电机的转速有以下关系[3]:

式(9)中,n为电机输出轴转速;P为电机输出轴转一圈的脉冲数;T为脉冲信号的周期。
根据式(9)即可计算出电机的转速,本文以型号为SS3144霍尔开关传感器作为研究对象,它是由电压调节器(Voltage Regulator)、霍尔片(Hall Plate)、运算放大器(Chopper)、斯密特触发器组成。其功能框图如图11(a)所示,霍尔片感应出来的电压经过运算放大器放大后,再利用斯密特触发器的迟滞特性,增加抗干扰能力,其特性如图10(b)所示,当磁性转盘的磁感应强度超过Bop时,传感器输出低电平,当磁感应强度降到BOP以下时,其输出的电平不变,直到磁感应强度降到BRP时,传感器才由低电平跳变为高电平,BOP与BRP之间的滞后使开关动作更为可靠。

(a)霍尔转速传感器功能图 (b)霍尔转速传感器特性图
霍尔转速传感器采样电路如图11所示,由霍尔转速传感器输出的转速信号经过电阻 R2限流后,将脉冲信号送入到微处理器中配置为捕捉模式的I/O端口,电路中二极管D1防止转速脉冲信号的反向击穿,R1为上拉电阻,电容C1起滤波作用,稳压二极管D2是将输出信号的幅值稳定在4.7V,防止输出信号过高损坏微处理器。
2.5 开关采样电路

图11 霍尔转速传感器采样电路

图12 开关采样电路
幵关信号有档位信号、点火开关、驻车信号、车门状态等,分两类:一类是由电机控制器提供的5V电源,另一类是蓄电池提供的12V电源。5V电压电源符合微处理器 I/O 口的电压要求,12V电压电源需要进行电气隔离及电平转换,如图12所示,点火开关SW2开关信号是由12V电源供电,因此需经过由三极管Q1、Q2和光电隔合器MOC3021等组成的隔离电路进行电气隔离,再通过并联在输出端稳压二极管 D2将信号电压稳定在 4.7V,防止电电压过高或者瞬间电压过高而损失微处理器,电容 C2起滤波作用。空挡开关SW1开关信号是由5V电源供电,通过R1、R2分压电阻分压,R3电阻限流后输出,稳压二极管 D1和电容 C1的作用与D2和C2的作用相同。
2.6 蓄电池电压采样电路
防止蓄电池使用过度,影响电池寿命,需要采样蓄电池电压,或蓄电池电量不能满足纯电坳汽车行驶要求,控制器禁止PWM信号输出,控制电机停止工作从而保护电机,蓄电池电压采样电路与温度传感器采样处理电路原理相同,不再论述。
3 电机转速控制策略
由直流电机的基本原理推导出直流电机转速[4]为:
式中:为电机转速(r/min);为电枢电压(V);为电枢电流(A);为电枢回路电阻(Ω);K为电动势常数;为励磁磁通(Wb)。
由式(10)可得,电机转速n的调节可通过改变电枢电压、电枢回路电阻、励磁磁通三个量,其中以改变电枢电压的方式最优,这种方式能实现无级调速。而电枢电压的改变可通过由微处理器控制输出的PWM(脉宽调制)信号改变,如图13所示。

图13 PWM调速原理及波形图
PWM的调速原理[4]是:施加在电枢绕组两端平均电压为:


点火开关的起动(START)挡接通,并且变速手柄处于P挡或空挡,即控制电机起动,此时电机的转速控制分电动汽车怠速、加速、异常保护三种控制策略决定。
3.1 电动汽车怠速时的电机转速控制策略
点火开关自动回位至 ON 档,变速手柄处于P挡或空挡,加速踏板无动作,电机即进入空挡怠速控制模式。微处理器输出的PWM信号占空比为0.3,目标转速700(RPM),将电机实际转速与预先设定的目标转速值进行比较,实现对电机转速的闭环控制。
3.2 电动汽车加速时的电机转速控制策略
当加速踏板有动作时,加速踏板传感器及其处理电路输出的电压范围是0.5V到4.5V,设加速踏板的上下阀值电压为Vmin = 0.75V和Vmax = 4.35V,定义加速踏板当前电压为U,则加速踏板的开度百分比P[5]为:




图14 加速踏板特性响应图
3.3 电动汽车异常保护时的电机转速控制策略
异常保护的电机控制策略是指对电机实行过流与过热保护,对控制器实行过热保护和对蓄电池的欠压保护。
电动汽车运行环境是恶劣的,会出现瞬间加速、爬坡和电机堵转等大转矩需求情况,此时电机电枢电流会突然增大,导致铜线绕组发热而损害电机。根据式(12)和(13)可推导计算出[5]:
由于转速不能突变,当负载突然增大时,根据电机的最大允许电流,则可依据式(16)计算出下一时刻最大允许占空比,该占空比作为与据式(15)计算得到的占空比的限值,使控制电枢电流不超过限值,从而保护电机不会因过流而损坏。
过热保护控制包括电机过热保护和控制器过热保护。电机过载会使电机发热量会急剧增加,为了避免烧毁电机,通过限制电机超额运行的时间或者根据电机温度来限定其扭矩输出。当电机温度传感器检测温度过高,限制或减少电机扭矩的输出。当电机温度高于75℃,禁止 PWM 信号输出,直到电机温度小于 75℃,恢复正常运行状态,当控制器温度大于 80℃时禁止 PWM 信号输出,当温度低于 80℃时恢复正常运行。蓄电池欠压保护是采取实时响应,每隔10ms采样蓄电池电压,并与预设的极值进行比较,当电压低于设定最小保护值时,若超过设定时间,则认为故障,禁止PWM 信号输出。
4 仿真试验及分析
加速踏板位置传感器处理电路通过Proteus电路仿真软件进行仿真,其电路性能如图15所示,性能良好。

图15 加速踏板处理电路输入与输出信号的关系
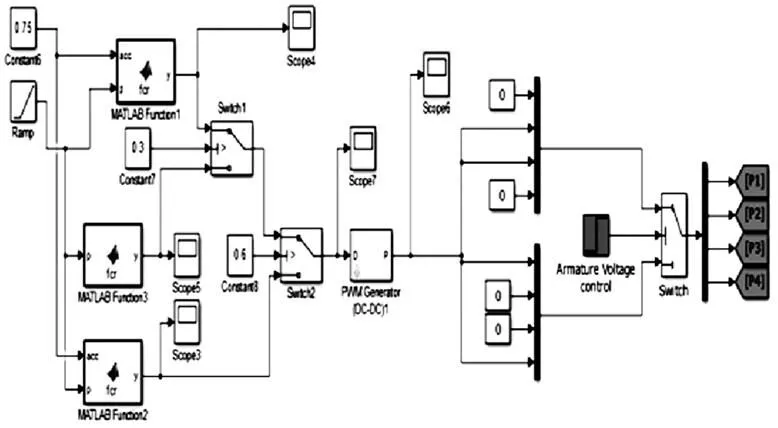
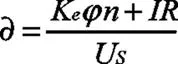
图16 加速踏板控制的可调PWM信号模块

图17 电机驱动模块
利用Matlab Simulink软件建立加速踏板控制电机转速模型,该模型由加速踏板控制的可调PWM信号模块(如图16所示)和电机驱动模块(如图17所示)组成。
设置加速踏板加速踏板特性响应值为75%,加速踏板采样处理电路电压从0.5V到4.5V变化时,其输出曲线图如图18(a)所示,经过式(1-15)变换得出的PWM信号如图18(b)所示,图19为受的PWM信号控制的电机正反转的转速、电枢电流和负载的仿真曲线图。由此图看出本文的控制策略能够获得随加速踏板开度变化稳定的转速。
图18 加速踏板采样处理电路电压变化及PWM信号图

图19 电机正反转的转速、电枢电流和负载的仿真曲线图
5 结论
本文中研究基于纯电动汽车电机控制器的加速踏板位置传感器及其处理电路、电机和控制器温度传感器及其处理电路、电机电流检测及其处理电路、蓄电池电压检测及其处理电路、电机转速传感器及其处理电路等关键技术,所提出的电机控制策略在直流电机转速控制中可靠,具有广泛的应用前景。
[1] 孙逢春,程夕明.电动汽车动力驱动系统现状及发展[J].汽车工程, 2000.
[2] 牛彩雯,何成平.传感器与检测技术[M].北京:机械工业出版社, 2016:89-90.
[3] 霍尔传感器如何测转速---霍尔传感器测转速原理.http://www.elec -fans.com/yuanqijian/sensor/20180113615017_a.html.
[4] 伊伟.纯电动汽车电机控制器的研究[D].山东:山东大学,2014:19- 20.
[5] 伊伟.纯电动汽车电机控制器的研究[D].山东:山东大学,2014:52- 53.
Research On Sensor Processing Circuit And Control Strategy Based OnPure Electric Vehicle Motor Controller
Qi Jinfeng
( Guangzhou Vocational College of Science and Technology, Guangdong Guangzhou 510550 )
With the continuous improvement of people's living standards, the demand for using automobiles as a means of transportation is gradually increasing, and the environmental pollution caused by traditional fuel vehicles is attracting more and more attention. Therefore, new energy vehicles with energy saving and environmental protection have been paid great attention to. Pure electric vehicle (EV) and hybrid electric vehicle (HEV) have been widely used and popularized. Motor controller has become a new research field of new energy vehicle. In this paper, the sensor of motor controller of pure electric vehicle and its processing circuit, motor speed control strategy are studied. Firstly, the composition of DC motor controller is introduced, then the sensor and its processing circuit of DC motor controller are described, and the speed control strategy of DC motor is studied according to the sensing signal.Finally, the control strategy of motor speed is simulated by matlab simulink software, and the result is good.
Motor controller; electric vehicle; control strategy; controller; sensor
U469.7
A
1671-7988(2019)07-14-06
戚金凤,学士,讲师,就职于广州科技职业技术学院,从事汽车电子研究工作。
U469.7
A
1671-7988(2019)07-14-06
10.16638/j.cnki.1671-7988.2019.07.004
猜你喜欢
汽车实用技术(2022年15期)2022-08-19
舰船科学技术(2022年11期)2022-07-15
防爆电机(2022年3期)2022-06-17
青年文学家(2021年21期)2021-09-05
军民两用技术与产品(2021年10期)2021-03-16
电机与控制学报(2018年9期)2018-05-14
读写算·素质教育论坛(2017年16期)2017-08-04
教育界·下旬(2016年4期)2016-11-19
飞天(2011年20期)2011-08-15
戏剧之家(2010年2期)2010-08-15