基于综合滤波算法与模糊PID控制的温度控制系统
2019-04-10 09:39周凤星严保康
仪表技术与传感器 2019年3期
李 幸,周凤星,严保康
(武汉科技大学信息科学与工程学院,湖北武汉 430081)
0 引言
温度是现代化工业生产中重要的被控参数之一,对温度的有效控制对于保证生产质量具有重大的现实意义和理论价值[1]。因此,准确的温度检测方法与合理的温度控制策略对于提高工业生产的精度与效率,其重要性是不言而喻的。热敏电阻是一种阻值会随着温度变化而变化的功能半导体,阻值随温度的升高而增大的一类热敏电阻,称之为正温度(positive temperature coefficient,PTC)系数热敏电阻。PTC热敏电阻具有灵敏度高、工作温度范围宽、体积小、使用方便、易加工且可大批量生产、稳定性好以及过载能力强等优点,因此在工业控制等需要温度检测和控制的领域得到广泛应用。
对于待检测灵敏度的NOx传感器,其内部含有PTC热敏电阻,且温度与热敏电阻阻值存在一一对应的关系。由于温度在很大程度上影响到测试的原始数据及结果等关键性因素,因此需要对传感器的温度进行严格的控制(750 ℃±5 ℃)。然而实现上述控制目标的前提条件是高精度的温度检测,对于这类高温度的应用场合,如果仅仅根据常规测温系统来进行设计,将无法实现高温区段的精确定位[2]。且加热电路中存在的大量噪声及干扰信号严重影响了与温度信号相关量的测量,甚至造成信噪比的严重偏小,进而导致该系统的温度检测性能下降。
为了解决上述问题,拟采集PTC热敏电阻两端的实时电压信号U1和流经PTC热敏电阻的实时电流信号I,并将U1和I转化为统一的电压信号U1和U2,再利用硬件滤波和以中位值、滑动平均、消抖滤波以及平移不变量小波去噪法为基础的综合滤波算法对双电压信号进行滤波消噪处理。滤波后的电压信号通过转换可得到实时电阻并做进一步转换以得到实时温度数值,最后通过模糊自适应PID控制对温度信号进行较好的控制即可达到系统的要求。
1 系统总体结构
图1为系统总体结构框图。

图1 系统总体结构图
如图1所示,首先电压、电流信号经信号采集与滤波电路处理后转化为电压、电压信号,之后程序控制采集卡实时采集2个电压信号并将其传至上位机LabVIEW进行软件滤波与信号转换,最后上位机的模糊PID控制程序输出控制量控制采集卡输出PWM波,PWM波控制加热装置[3],保证了传感器的温度。
2 温度检测系统的设计
2.1 PTC热敏电阻的阻-温特性
在有效的温度范围内(-50~+1 000 ℃),待控制温度的NOx传感器的温度与其电阻满足以下关系式:
R1=R2[1+TCR(T1-T2)]
(1)
式中:R1为传感器实时热敏电阻值;R2为测试系统启动前传感器的热敏电阻值;T1为传感器实时温度值;T2为测试系统启动前传感器温度值;TCR为传感器热敏电阻温度系数(与制作材质有关,本传感器的TCR为严格的0.039)。
式(1)中,R2、T2可通过仪器测量得到。因此,知道实时热敏电阻值R1即可知道实时温度值 。
2.2 信号采集与滤波电路的设计
该信号采集与滤波电路由模拟电路和数字电路组成,如图2所示。

图2 信号采集与滤波电路框图
图2采用电源隔离(VA1、±VA2、±VA3、VA4表示4种模拟电源电压,VD表示数字电源电压)及地线单点短接(短接电阻R0的阻值为0)的方式,降低数字信号对模拟信号的影响[2]。模拟电路包括加热电路、隔离模块、电流互感器模块以及RC滤波模块;数字电路由USB-6003数据采集卡构成,该款采集卡含有8路AI(16位,100 kS/s)、2路AO(5 kS/s/ch)、13路DIO,能较好地满足工业控制中A/D转换、数据采集与仪器控制的功能。
图3是信号采集与滤波电路中模拟电路图。将隔离芯片ISO124P接入热敏电阻的两端,热敏电阻两端电压信号U1经隔离芯片和RC滤波模块隔离和滤波后传输进采集卡的一路AI口AI0;将电流互感器ACS712串联接入加热电路,电路中电流I通过电流电压转换后输出电压信号U2,U2再经RC滤波模块滤波后传输进采集卡的另一路AI口AI1。电流I与电压U2满足关系式:
U2=0.1I+2.5
(2)
式中:I为加热电路中电流;U2为I经电流互感器转换后的输出电压。
电源VCC1、VCC2、VCC3经DC/DC模块HL06M05D12A(U1、U2)、HL06M05S05A(U3)进行直流电压转换后对隔离芯片ISO124P以及电流互感器ACS712供电,以使得它们可靠稳定的工作。
对于图2和图3所述的RC滤波模块,它是由2个10 kΩ电阻及1个1 μF电容构成。其电路图如图4所示。由图3所示的模拟电路可得到电压信号U1和U2,程序控制采集卡采集U1和U2并将它们进行A/D转换后传至上位机,最终利用上位机程序来实现数据去噪与滤波、电压-温度信号转换以及温度控制。
3 基于中位值、滑动平均、消抖滤波法以及平移不变量小波去噪法的综合滤波算法
数据去噪是数据处理的一项重要工作,直接影响后续数据处理结果的可靠性[4]。对于上述信号采集电路所采集的电压信号U1、U2,虽然它们经过RC滤波模块的滤波处理,但是混杂在其中的噪声信号与干扰信号对温度检测构成很大的干扰,严重影响着温度测量的准确性。针对以上问题,提出了基于中位值、滑动平均、消抖滤波以及平移不变量小波去噪法的综合滤波算法来对电压信号进行去噪与滤波处理。该综合滤波算法实现流程如下:
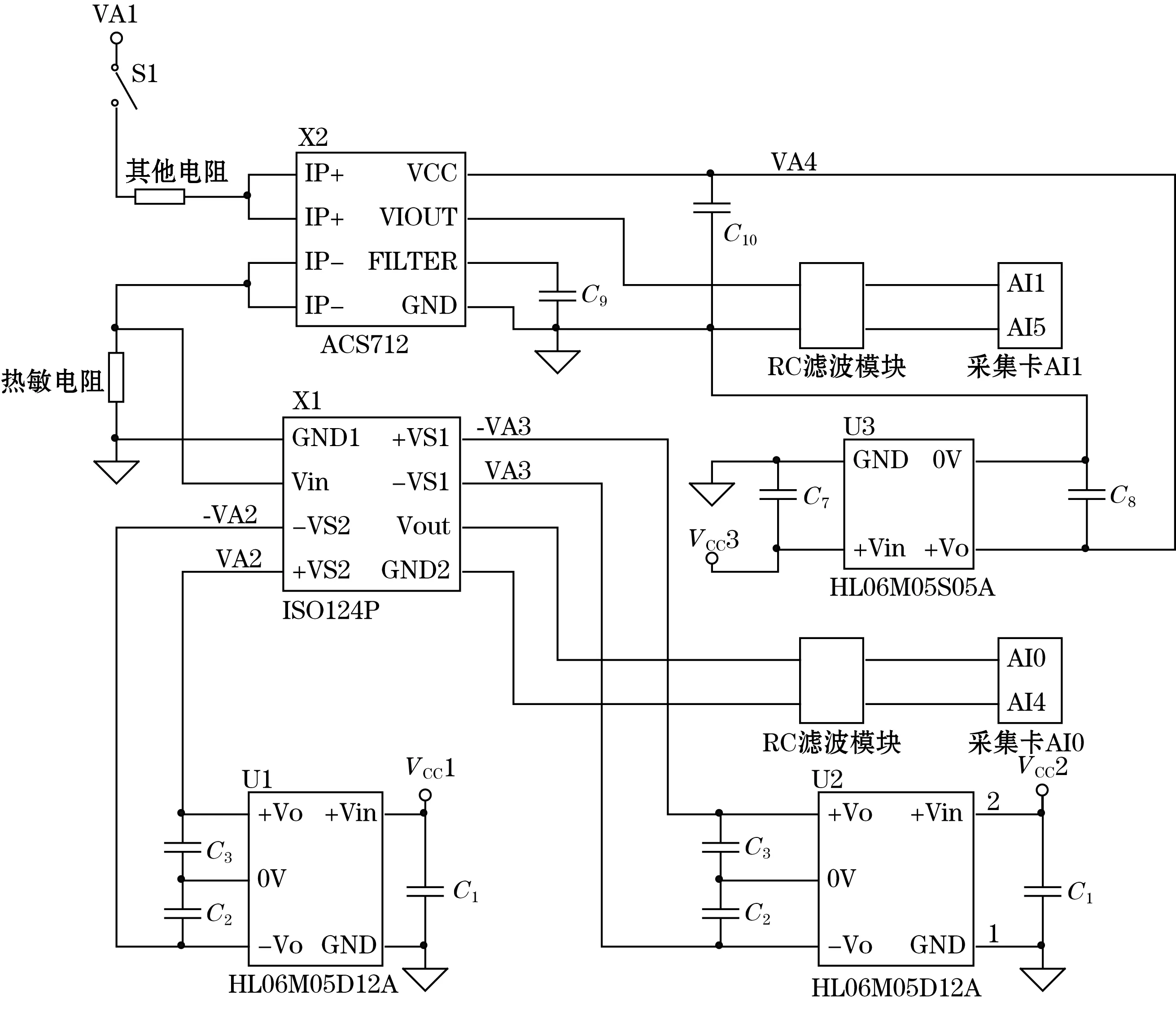
图3 信号采集与滤波电路中模拟电路图

图4 RC滤波模块电路图
首先利用中位值滤波法和消抖滤波法对信号进行处理:按顺序截取系统采集的9m个电压数值,将这些电压数值按采集顺序的先后分成m组,每组9个数。利用中位值滤波法,将各组中的9个数值分别按从小到大排列并选取中间值为每组的有效值,如此,从9m个电压数值中选取了m个数,将这m个数按采集顺序的先后排列,分别记为U1-1、U2-1、U3-1……Um-1,然后利用消抖滤波法,设定计数器的上限为5,最初的有效值设定为U1-1,将U2-1、U3-1……Um-1与U1-1进行比较,如果采样值等于U1-1,则计数器清零;如果采样值大于或者小于U1-1,则计数器加1,此时加1后判断计数器是否大于或者等于上限值5,如果满足大于或者等于5,则计数器溢出,将本次值替换为当前有效值并清空计数器。
利用中位值滤波法和消抖滤波法先采取10个电压数值并把这10个数值看做一个队列,然后再利用这2种算法,遵循先进先出的原则,将后续每次采样并处理得到的2个新数据放入队尾,并扔掉原来队首的2个数据,然后得到新的10个数据U1-2、U2-2、U3-2、U4-2、U5-2、U6-2、U7-2、U8-2、U9-2、U10-2,将队列中新的10个数据进行算术平均运算,即:
(3)


(4)

对于式(4)中的T,该阈值法为
(5)
式中:ωnew为经阈值法去噪处理后的小波系数;ω为经阈值法去噪处理前的小波系数;λ为选取的阈值。
对于式(5)中所述的λ,该阈值为
(6)

采集的电压信号经由以上综合滤波算法处理后,便可基本滤除混杂在其中的噪声信号与干扰信号,从而使得由电压信号转换而来的温度信号达到很小的抖动,进而满足了NOx传感器精度检测系统的相关要求。
4 模糊自适应PID在温度控制中的应用
4.1 模糊自适应PID控制器结构
PID控制器是将偏差的比例、积分和微分通过线性组合构成控制量,对被控对象进行控制[6]。但是传统的温度控制需要掌握受控对象的数学模型,很难确定PID的3个参数。因此,本系统采用模糊PID算法来控制传感器的温度。由于模糊PID不需要控制对象的数学模型而是通过实时测量的温度值与设置温度的差值作为控制量的大小,使不同的控制对象都能得到最佳的PID调整[3]。图5是模糊自适应PID控制器结构框图。
我国南海海域的波浪平均周期为4~6 s,选取3~4级海况作为实际工况,选取某海域,根据统计结果,当波浪周期与有效波高的联合分布概率达到极大值时,波浪平均周期约为4.5 s,有效波高约为1.2 m。[13]为在分析中尽可能还原实际工作海况,选取波浪周期T=4.5 s,有效波高H=1.2 m,流速为1.2 m/s的海况作为模拟工作海况。风对于拖曳线列阵的水动力学效应影响不大,故在选取环境因素时未予以考虑。

图5 模糊自适应PID控制器结构框图
模糊自适应PID控制器以温度变化e和温度变化率ec作为控制输入量,以PID输出量得到其调整值Δkp、Δki、Δkd,并实时调整PID的参数值具体关系式如式(7)所示:
kp=f1(|e|,|ec|)
ki=f2(|e|,|ec|)
(7)
kd=f3(|e|,|ec|)
式中:e为温度变化;ec为温度变化率;kp、ki、kd分别为比例参数、积分参数、微分参数;f1、f2、f3分别为对比例参数、积分参数、微分参数进行实时调整。
4.2 模糊自适应PID的实现方法
PID参数模糊自整定是找出PID 3个参数与e和ec之间的模糊关系,在运行中通过不断检测e和ec,根据模糊控制原理来对3个参数进行在线修改,以满足不同e和ec时对控制参数的不同要求,从而使被控对象拥有良好的动、静态性能。
按照系统实时的温度变化e和温度变化率ec,根据经验,kp、ki、kd的整定原则如下[7-8]:
(1)当e的绝对值取值较大时,为防止较大的超调通常取ki=0,kp、kd的取值应该尽量大;
(2)当e的绝对值处于中等大小时,为使系统具有较小的超调,kp的取值应较小;kd的取值影响系统的响应速度,所以要适中;
(3)当e的绝对值较小的时候,为使系统稳定,kp与ki应取较大值,而此种情况下kd的取值严重影响着系统的振荡情况,所以取值要适中。
PID参数的整定必须考虑在不同时刻3个参数的作用以及相互之间的互联关系[9],否则将会对系统的调节精度、响应速度、调节时间、动静态特性以及抗干扰性等方面产生很大的影响。根据以上经验,模糊控制规则如表1所示(限于篇幅,仅展列Δkp的模糊决策表)。

表1 Δkp的模糊规则控制表
温度控制系统将采集到的实时温度信号与上位机设置的温度值比较,获得系统的输入信号温度变化e和温度变化率ec,将它们定义为模糊集上的论域:e、ec={-3,-2,-1,0,1,2,3}。3个输出控制量的修正值Δkp、Δki、Δkd的模糊集合为{NB,NM,NS,ZO,PS,PM,PB}[10],集合中的各个元素分别代表负大、负中、负小、零、正小、正中、正大。 Δkp论域为{-3,-2,-1,0,1,2,3},Δki论域{-0.3,-0.2,-0.1,0,0.1,0.2,0.3},Δkd论域为{-3,-2,-1,0,1,2,3}。由各模糊子集的隶属度赋值表和各参数模糊控制模型,应用模糊合成推理设计PID参数的模糊矩阵表,查出修正参数带入式(8)计算:
(8)

在线运行过程中,控制系统通过对模糊逻辑规则的结果处理、查表和运算,完成对PID参数的在线自校正。其工作流程图如图6所示。

图6 模糊自适应PID控制器工作流程图
5 实验结果与分析
将上述综合滤波算法和模糊自适应PID控制应用于整个温度控制系统,以观察温度控制的效果。
在某次实验中,利用采集卡的A/D功能采集了215(32 768)个在750 ℃附近的温度数据。这些数据经过模糊自适应PID控制但未经滤波算法滤波的波形数据图如图7所示。

图7 经模糊PID控制但未滤波的数据
从图7可以很直观地看出,经过模糊自适应PID控制的温度数据大都能稳定在750 ℃±10 ℃。但是图7中的波形是杂乱无章的,大量的噪声与干扰信号充斥在有用的温度信号中,而此时的模糊自适应PID控制对此却无能为力。因此证明必须进行软件算法滤波。
图8是经中位值、消抖滤波以及滑动平均滤波之后再经过模糊自适应PID控制的温度数据。对比图7可以很明显地看出,杂乱无章的温度波形逐渐在向750 ℃逼近。这3种滤波法确实起到了一定的作用且有了很好的效果。从图8可看出,波形的上下幅值差虽然减小了不少,但是温度数据波形依旧很杂乱,噪声信号和干扰信号依然充斥在整个有用信号中。

图8 经中位值滤波、消抖滤波以及滑动平均滤波之后再经过模糊自适应PID控制的温度数据波形图
图9是温度数据经中位值、消抖以及滑动平均滤波之后,再经平移不变量小波去噪(小波选取为haar小波,分解层数为第七层)后并通过模糊自适应PID控制的结果。

图9 经综合滤波算法和模糊自适应PID处理的温度波形
从图9可以较直观地看出:该温度信号经过一定的软件算法(中位值、消抖滤波、滑动平均滤波以及平移不变量小波去噪)滤波后再经过模糊自适应PID控制得到了效果很好的温度信号。该温度信号中的数据大部分能保持在750 ℃±1 ℃,完全满足了本检测系统的要求。
6 结论
为了满足某氮氧化物(NOx)传感器精度测试系统“传感器温度应维持在750 ℃以确保测试结果的准确性”的要求,本文设计了相应的信号采集与滤波电路,并利用数据采集卡采集原始电流电压信号以获得温度信号,温度信号由综合滤波算法滤波后再经过模糊自适应PID控制以维持传感器的温度在750℃。实验结果证明:
(1)本文提出的以中位值、滑动平均、消抖滤波法以及平移不变量小波去噪法为基础的综合滤波算法有效地滤除了对温度信号构成严重干扰的噪声信号,得到了差值极小抖动的温度信号,保证了温度检测的准确性,为精确地温度控制做了良好的铺垫;
(2)本文提出的模糊自适应PID控制完美地使温度控制在了极小的抖动范围,大部分时间温度能维持在750 ℃±1 ℃,成功地完成了“传感器温度应维持在750 ℃以确保测试结果的准确性”的任务。
猜你喜欢
中国自动识别技术(2021年6期)2021-02-14
铝加工(2020年6期)2020-12-20
大自然探索(2020年6期)2020-06-19
物理与工程(2020年1期)2020-06-07
青年生活(2019年27期)2019-10-21
证券市场周刊(2016年24期)2016-06-29
火控雷达技术(2016年3期)2016-02-06
海军航空大学学报(2015年1期)2015-11-11
船电技术(2015年12期)2015-10-24
空间控制技术与应用(2015年3期)2015-06-05