隧道磁阻微陀螺结构设计与加工
2019-04-09 08:03:00丁希聪李孟委秦世洋
中北大学学报(自然科学版) 2019年2期
丁希聪, 李孟委, 秦世洋
(1. 中北大学 微系统集成研究中心, 山西 太原 030051; 2. 中北大学 仪器与电子学院, 山西 太原 030051;3. 中北大学 仪器科学与动态测试重点实验室, 山西 太原 030051)
0 引 言
MEMS陀螺具有小体积、 低功耗、 批量制作的优势, 可应用于消费电子、 工业控制、 惯性导航、 军事等诸多领域[1-4]. MEMS陀螺的核心是对微弱哥氏力引起的微位移或微应力进行高灵敏检测.

本文设计了一个基于隧道磁阻效应的面内检测的微陀螺结构, 隧道磁阻效应是基于第四代磁传感技术, 其产生机理是自旋相关的隧穿效应, 具有高灵敏、 低噪声、 高分辨率、 小体积的优势[11-14]. 本文将隧道磁阻应用于微陀螺中, 来实现微弱柯氏力检测, 主要对微陀螺结构灵敏度进行设计, 完成了微陀螺结构设计、 工艺加工及测试, 最终得到微陀螺结构灵敏度, 为高灵敏的隧道磁阻微陀螺检测技术提供了理论支持.
1 隧道磁阻微陀螺工作原理
隧道磁阻微陀螺结构示意图如图 1 所示, 其工作原理为: 在微陀螺结构驱动质量块左右侧分别布置有驱动导线和驱动反馈导线, 驱动导线和驱动反馈导线下设置有驱动磁体, 当在驱动导线上通入交变驱动电流时会产生安培力, 带动微陀螺质量块沿驱动方向(X轴)产生往复振动, 驱动反馈导线输出反馈信号; 当Z轴有角速率输入时, 由于科氏力效应, 敏感质量块会带动上方的隧道磁阻器件沿检测方向(Y轴)运动, 致使隧道磁阻器件与固定在基板上的检测磁体位置发生相对变化, 当隧道磁阻器件敏感到的空间磁场变化时, 自身阻值会发生剧烈改变, 通过检测隧道磁阻器件的阻值变化来得到输入角速率信号.
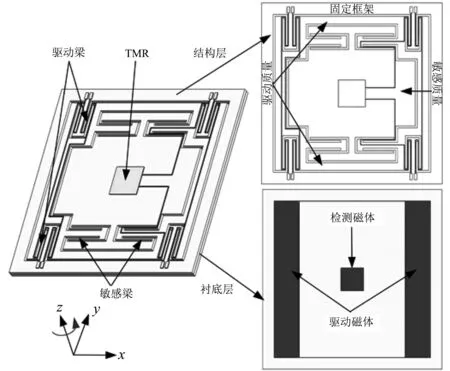
图 1 隧道磁阻微陀螺工作原理示意图Fig.1 Schematics of the tunneling magnetoresistance gyroscope
2 隧道磁阻微陀螺动力学分析
微陀螺的振动质量块在沿X方向驱动力的作用下在驱动方向谐振, 当沿Z方向有角速率信号输入时, 振动质量块在哥氏力作用下在Y方向做简谐振动. 微陀螺的简化模型为两个方向的二阶系统, 其振动方式近似为: 弹簧-质量块-阻尼系统基于外力作用下的振动过程. 简化模型如图 2 所示.

图 2 微陀螺的动力学简化模型图Fig.2 Dynamic model of micro-gyroscope
微陀螺的动力学方程可描述为[15]
(1)

(2)
式中:F0是电磁驱动力;ω为驱动力的角频率;mx,my分别为驱动模态质量和检测模态质量;kx,ky分别为驱动模态刚度和检测模态刚度;cx,cy分别为驱动模态阻尼和检测模态阻尼;Ω是所输入的角速率.
为了对微陀螺结构运动特性进行直观分析, 将式(1), 式(2)变化得
(3)
(4)

分别求解微分方程式(3)和式(4), 得到微陀螺在驱动模态和检测模态的振动位移表达式为
(5)

(6)
隧道阻微陀螺结构灵敏度计算公式为
(7)
当驱动模态和检测模态频率匹配时, 根据式(5), 式(6), 隧道磁阻微陀螺结构灵敏度计算公式可简化为
(8)
3 隧道磁阻微陀螺灵敏度设计
根据隧道磁阻微陀螺原理以及其系统构成, 将隧道磁阻微陀螺的灵敏度分为三部分, 结构灵敏度、 磁场灵敏度和磁阻灵敏度, 隧道磁阻微陀螺总灵敏度为三者的乘积, 具体灵敏度分解如图 3 所示. 本文主要对隧道磁阻微陀螺结构灵敏度进行详细介绍.

图 3 隧道磁阻陀螺灵敏度分解图Fig.3 Distribution of the sensitivity
灵敏度之间的关系为
S=S1×S2×S3.
(9)
所设计隧道磁阻微陀螺结构如图 4 所示, 微陀螺结构尺寸参数如表 1 所示.

图 4 微陀螺结构示意图Fig.4 The structure of micro-gyroscope

表 1 所设计微陀螺关键参数Tab.1 Key parameters of the micromachined gyroscope designed
用有限元软件ANSYS对微陀螺结构进行模态仿真, 求得固有频率和振型. 微陀螺驱动和检测模态仿真结果如图 5 所示, 可知驱动模态谐振频率为6 851 Hz, 检测模态谐振频率为6 859 Hz.
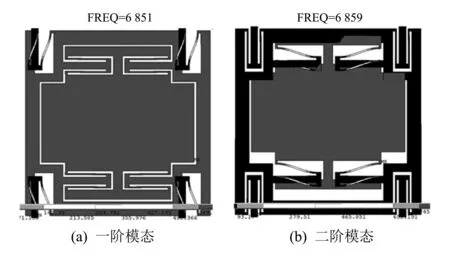
图 5 微陀螺谐振模态分析Fig.5 Resonance mode analysis of the micro-gyroscope
对微机械陀螺的幅频特性进行设计仿真, 在微陀螺驱动方向施加5 μN的电磁驱动力, 沿Z轴输入1 °/s的角速率, 根据表 1, 式(5)和式(6), 理论计算得到微陀螺驱动方向位移为5.41×10-6m, 检测方向位移为1.07×10-7m, 代入式(7) 得到微陀螺结构灵敏度为107 nm/°/s.
在ANSYS中仿真得到驱动方向幅频响应曲线如图 6(a) 和检测方向幅频响应曲线如图 6(b), 由图可知, 驱动方向位移幅值为5.41×10-6m, 检测方向位移幅值为1.62×10-7m, 仿真得的微陀螺的结构灵敏度为162 nm/°/s.


图 6 微陀螺谐响应幅频分析Fig.6 Harmonic response amplitude-frequency analysis of the micro-gyroscope
4 隧道磁阻微陀螺结构加工及测试
4.1 隧道磁阻微陀螺工艺加工
对微陀螺结构进行了工艺加工, 加工工艺流程如图 7 所示.

图 7 隧道磁阻陀螺结构加工工艺Fig.7 The processing technology of the tunneling magnetoresistance micro-gyroscope structure
首先在双抛的(100)单晶硅片上沉积一层SiO2, 制作绝缘层; 然后磁控溅射Cu制备种子层, 光刻后电镀Cu、 Au, 制作驱动导线; 采用湿法腐蚀(HF溶液)去除种子层, 再光刻图形化正面结构, RIE去除硅片上的SiO2, 然后再DRIE刻蚀Si, 得到微陀螺正面结构; 最后背面涂胶光刻, DRIE释放微陀螺结构. 微陀螺加工实物图如图 8 所示.

图 8 隧道磁阻陀螺结构加工实物图Fig.8 Photograph of the tunneling magnetoresistance micro-gyroscope structure
4.2 隧道磁阻微陀螺结构测试
对所加工制作的微陀螺进行驱动频率和检测频率测试, 在微陀螺驱动方向和检测方向分别加载敲击力, 产生冲击信号, 冲击信号包含所有频谱, 微陀螺的质量块会在驱动模态和检测模态固有频率处自由振动, 微陀螺结构上表面驱动导线在磁场中运动切割磁力线产生动生电动势, 该信号经检测放大电路与示波器相连接, 驱动和检测方向测试结果如图 9 所示.

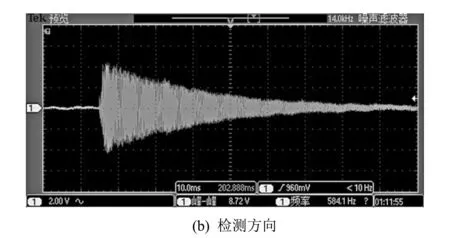
图 9 微陀螺敲击测试Fig.9 Tap testing of the fabrication micro-gyroscope structure
在Matlab中对驱动和检测方向测试数据进行时域信号输出、 再经频域转换、 傅里叶及希尔伯变换, 结果如图 10 所示. 在冲击信号作用下, 陀螺发生了谐振, 证明驱动和检测方向能够运动, 且驱动和检测方向谐振频率分别为6 853 Hz和6 854 Hz, 与仿真结果基本一致.

图 10 微陀螺驱动和检测模态谐振频率波形Fig.10 Resonance frequency curve of the micro-gyroscope structure drive mode and sense mode
对驱动方向和检测方向的谐振频率波形进行滤波, 滤波结果如图 11 所示. 在6 853 Hz中心频率时, 根据半波法[16]得到驱动方向上的Qx值为571.1; 在6 854 Hz中心频率时, 根据半波法得到检测方向上的Qy值为527.3.
结构灵敏度由式(9)计算得到
所加工制作的微陀螺结构谐振频率与理论设计的频率基本一致, 但结构灵敏度有所降低, 经分析可能是由于大气环境下空气阻尼的影响, 导致Q值降低, 致使所加工的微陀螺结构灵敏度下降.
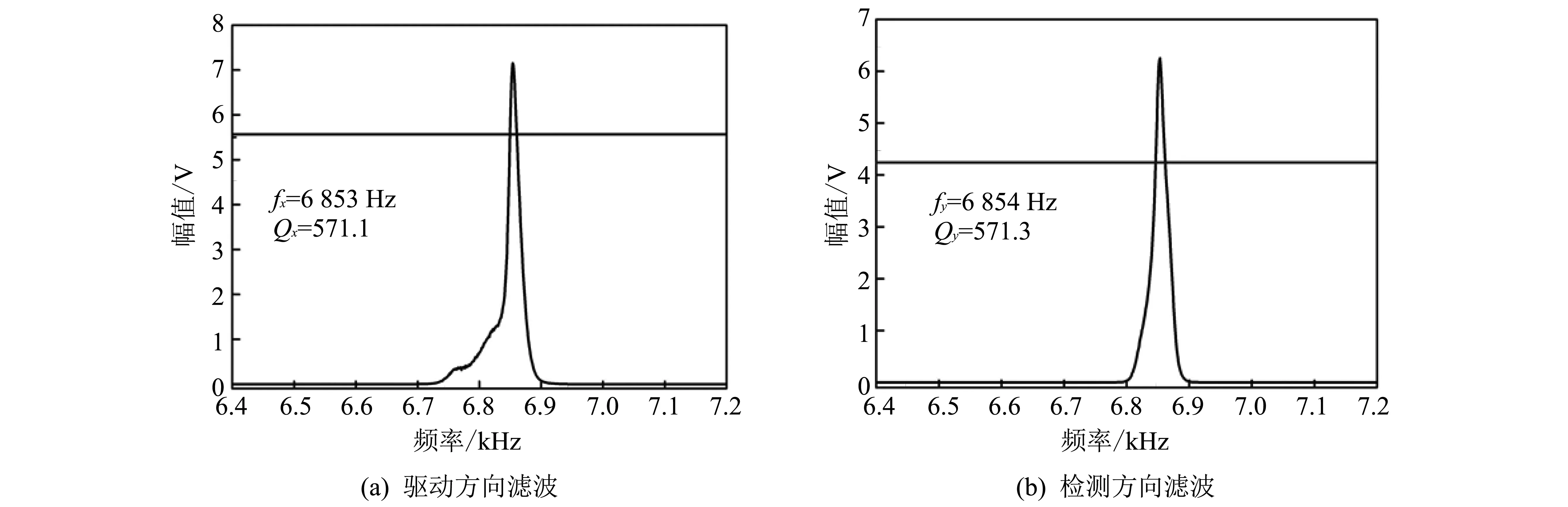
图 11 微陀螺谐振频率处滤波后波形Fig.11 Fitered curve of the micro-gyroscope at resonance frequency
5 结 论
本文采用隧道磁阻效应对微陀螺进行检测, 完成了微陀螺结构设计、 加工及测试, 得到微陀螺驱动方向和检测方向谐振频率分别为6 853 Hz和5 854 Hz, 与理论仿真基本一致. 然后采用半波法得到在大气环境下微陀螺结构驱动方向Q值为571.1, 检测方向Q值为527.3. 结果显示所加工的微陀螺频率匹配良好, 结构灵敏度达到15.3 nm/°/s. 本文主要对微陀螺结构灵敏度进行了分析, 下一步将进行微陀螺磁场灵敏度和磁阻灵敏度设计及测试, 实现隧道磁阻陀螺的集成组装, 为微陀螺的高灵敏检测提供了一种可能途径, 对提高微机械陀螺的检测精度具有重要意义.
猜你喜欢
防爆电机(2021年4期)2021-07-28 07:42:46
成都信息工程大学学报(2020年5期)2020-07-29 08:50:12
小学生学习指导(低年级)(2019年10期)2019-10-16 08:12:34
学生天地(2019年6期)2019-03-07 01:10:46
军事文摘(2018年24期)2018-12-26 00:58:18
快乐语文(2018年36期)2018-03-12 00:56:02
电子设计工程(2017年20期)2017-02-10 03:40:05
西南交通大学学报(2016年3期)2016-06-15 20:29:35
通信电源技术(2016年4期)2016-04-04 02:57:38
电机与控制应用(2015年1期)2015-03-01 03:49:08