
无刷直流电机电控纠偏控制系统设计与研究
2019-04-08 01:34
石油矿场机械 2019年2期
(郑州城市职业学院 机电工程系,郑州 452370)
垂直钻井可增大套管下井深度,减小钻进时的转矩和摩擦。实际钻进过程中,由于地质条件等因素,井眼难以实现垂直。受钻井结构形式的限制,纠偏机构驱动电机直径应小于33 mm,且驱动力矩约为2 N·m。常用直流电机和步进电机转矩为2 N·m时,其直径远大于33 mm。无刷直流电机具有转速高、寿命长、过载能力强、电气时间常数小、电感低等特点,可与驱动控制器、减速箱和反馈元件等构成多种伺服系统[1-2]。本文通过电控纠偏系统的设计与研究,实现钻井的垂直钻进。
1 电控纠偏特性与工作原理
1.1 电控纠偏特性
自动垂直钻进工具作为先进的钻井设备,具有井下闭环控制系统,可自动纠斜,保持井壁垂直。传统钻井中,通过液压系统实现纠偏控制[3]。电控纠偏系统通过无刷直流电机,与纠偏工具导向块直接连接,井下微处理器对偏移信号进行分析计算,控制电机转动,从而实现对导向块的伸缩控制。钻进过程中,井下为高压、高温且强振动环境,对纠偏系统影响较大,因此,纠偏控制系统需具有较高的可靠性。特定的无刷直流电机具有抗高压、高温、防振等优点,且过载能力强,具有较高的可靠性和稳定性[4]。该系统主要在小直径导向钻井中应用。
1.2 电控纠偏工作原理
垂直钻井中,自动钻进工具的电控纠偏系统原理如图1所示。
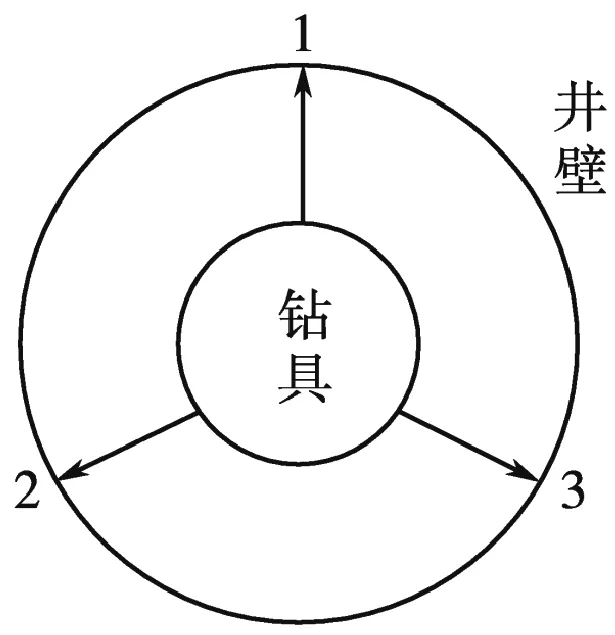
图1 电控纠偏系统原理
当钻进过程发生井斜时,井下微处理器STM32采集倾斜信号,并进行分析计算,将控制指令发送于导向块控制系统,3路无刷直流电机对3个互为120°的导向块的伸缩进行控制,使井下钻进工具受井壁反作用力,从而促使钻具沿垂直方向钻进。钻具回归垂直轨道后,控制导向块回缩,消除反作用力。井下闭环自动控制,可有效确保钻井轨道的控制精度及钻井垂直度。
2 纠偏控制方法
电机驱动控制中,通过STM32光电隔离对MC33039和MC33035控制器进行三相闭环控制,从而实现对无刷直流电机的制动与正、反转控制。3个被控电机分别与3个导向块相连接,通过电机正、反转控制导向块的伸缩运动。各导向块控制方式与伸缩状态如表1所示。
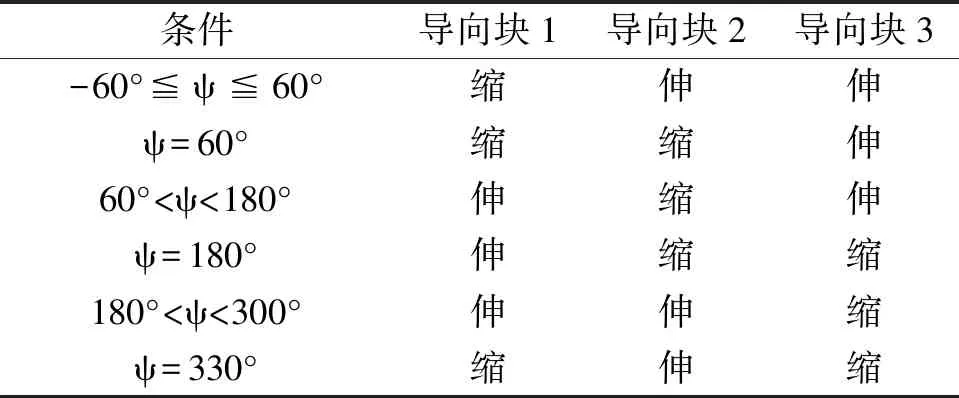
表1 电机控制导向块伸缩方案
3个电机独立控制3个导向块。纠偏过程中2个电机可同时运转,通过2个电机分别对导向块运动进行控制,以产生2种不同的反作用力。2种不同的反作用力的矢量和方向可在2个导向块120°夹角范围内的任何位置。由此可知,3个电机两两组合所产生的反作用力方向可为360°范围内的任意位置。纠偏控制过程如图2所示。
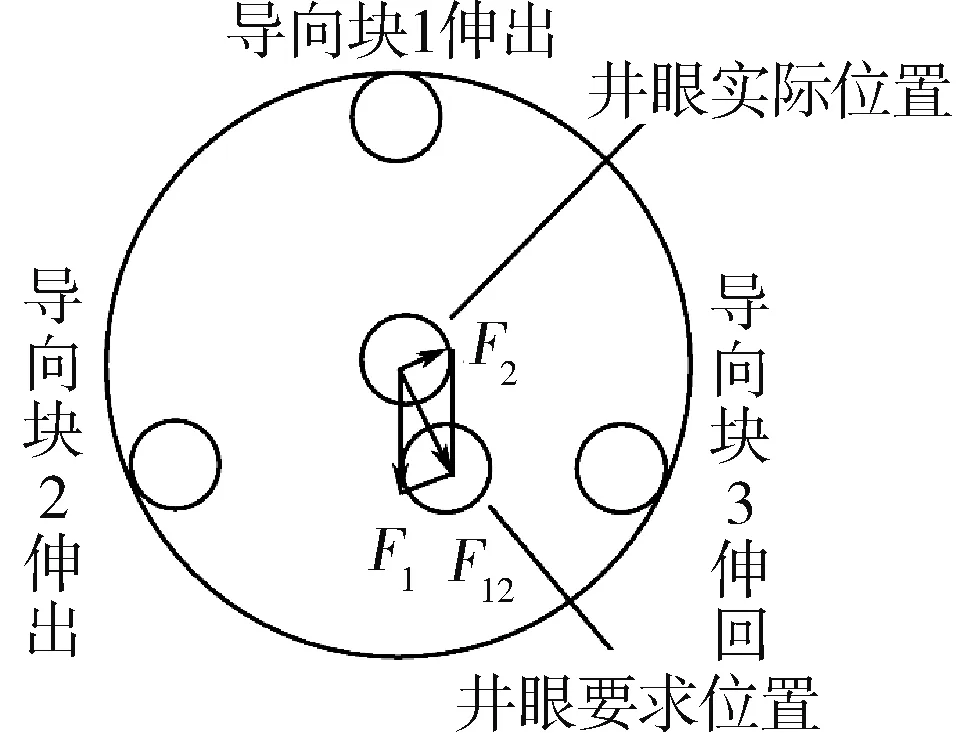
图2 电机纠偏控制过程示意
3 电驱控制动力源与硬件结构
3.1 电驱控制动力源
纠偏系统采用电控的方式对钻井工具进行钻进轨迹的纠正,系统采用稳定直流电源对直流电机供电。由于纠偏系统与钻进工具均处于深井工作状态,不便于井上供电,由井下动力源提供直流电源。井下电控纠偏系统供电方式可为电池供电和发电机供电2种方式,因电池供电对供电时间和供电环境等要求高,难以实现持续稳定供电,故选取发电机供电,发电机可持续稳定为垂直钻具提供直流电源,保证钻具处于完整闭环控制中,具有成本低、寿命长、稳定可靠性等特点。钻井用井下发电机作为钻探装置的辅助设备,安装于井下内/外管之间的环形腔中,发电机定子嵌入于外管内壁,转子固定于内管外壁;内管上下分别与钻杆和钻头相连接;发电机与整流稳压装置连接,输出电能经处理输送给电控装置。电控装置的输出与深度测量装置、斜度测量装置、电磁压力比例阀及电控纠偏系统的输入连接。
3.2 电驱控制硬件结构
电驱纠偏控制系统硬件结构如图3所示。

图3 纠偏控制系统硬件结构
ARM最小系统由微处理器STM32构成,其I/O口输出经光耦隔离,实现对MC33035的正/反转和制动控制。直流电机转子位置信号经MC33035与MC33039进行转换,外部连接3个IRF540与3个IRF9540功率开关,构成三相逆变器,对永磁无刷直流电机进行控制,控制器电路可反馈转速信号,从而组成转速闭环调节系统。电机转子位置检测器将三相位置检测信号传送与控制器电路,控制器一方面将检测信号传输与MC33035,其内部译码电路对启停控制端、正/反转控制端、电流检测端及制动控制端进行综合分析计算,产生逆变器三相上/下桥臂开关元件的六路原始控制信号,其三相下桥开关信号需根据无刷直流电机调速机理对脉宽进行调制。驱动电路对调制后的PWM三相下桥控制信号进行放大、整形,并加至逆变器六开关,为电机提供正常工作所需的三相方波电流。另一方面,控制器将检测信号传送与MC33039,经f/V转换,所得脉冲信号FB与电机转速为正比关系。FB信号经阻容网络滤波,可得转速反馈信号,通过MC33035的误差放大,形成P调节器,完成电机转速的闭环控制。同时电机电流信号经处理,由STM32进行A/D变换,对电机电流信号进行实时检测,当电流较大引发故障时,MC33035错误输出经光耦隔离,由STM32进行判别。错误时电机制动,故障解除时电机重启[5-7]。
4 软件设计
纠偏控制系统由串口采集测斜仪偏斜角信号,经微处理器STM32进行判断后对钻进工具垂直度进行修正。同时,将偏斜角及方位角等参数传输与地面储存器进行储存,实现地上工作人员对井下钻进状态的实时监控。地面工作人员也可向STM32控制器发送控制指令,完成对纠偏单元的手动控制,以实现最佳垂直钻进。系统中,通过光耦隔离避免STM32微处理器控制板与MC33035电机驱动板之间的相互干扰。纠偏过程繁琐,系统惯性大,被控对象难以精准建模,采用PWM控制技术与PI控制算法实现系统控制[8]。PI控制算法具有综合性强,稳态误差性等特点,且实用简单,鲁棒性好。当系统所需纠偏力较小时,电机转速较低,转矩波动性大,稳定性差,且动态响应缓慢,采用电流内环调节以提高对纠偏力的控制稳定性。电流闭环调节与转速闭环调节构成双闭环调节系统。转速调制器输出电流值与电流实际反馈值进行比较,比较值输入电流PI调节器,周期序列信号与PI调节器输出信号合成为PWM逻辑控制信号,功率开关可依据逻辑换相模块顺序导通,进而对绕组相电流和逆变器的幅值电压进行控制,实现逆变器输出电流跟随给定电流的变化而改变,且具有稳态无静差性。若钻具偏移且偏移角大于既定阈值,则纠偏控制系统通过3路电机对3个导向块进行控制,使偏移角回归设定范围,之后导向块回缩,钻具继续钻进。
电驱控制流程如图4所示。
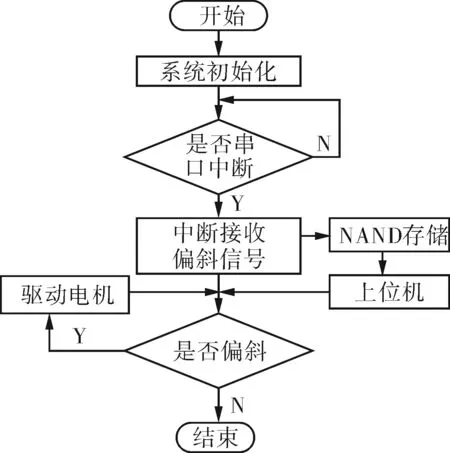
图4 纠偏系统电驱控制流程
5 试验分析及验证
为适应井下复杂环境,保持系统稳定工作,选取3路无刷直流电机,对钻进钻具进行实时自动纠偏,保持钻具钻进垂直度,且自动传输保存故障数据。试验中,设定无刷直流电机各参数如表2所示。

表2 无刷直流电机试验参数
电机正转时,有负载和无负载状态下电机电流信号与转速矢量曲线如图5所示。由试验可知,当电机转速为15 r/min时,其转矩达到要求的2 N·m。
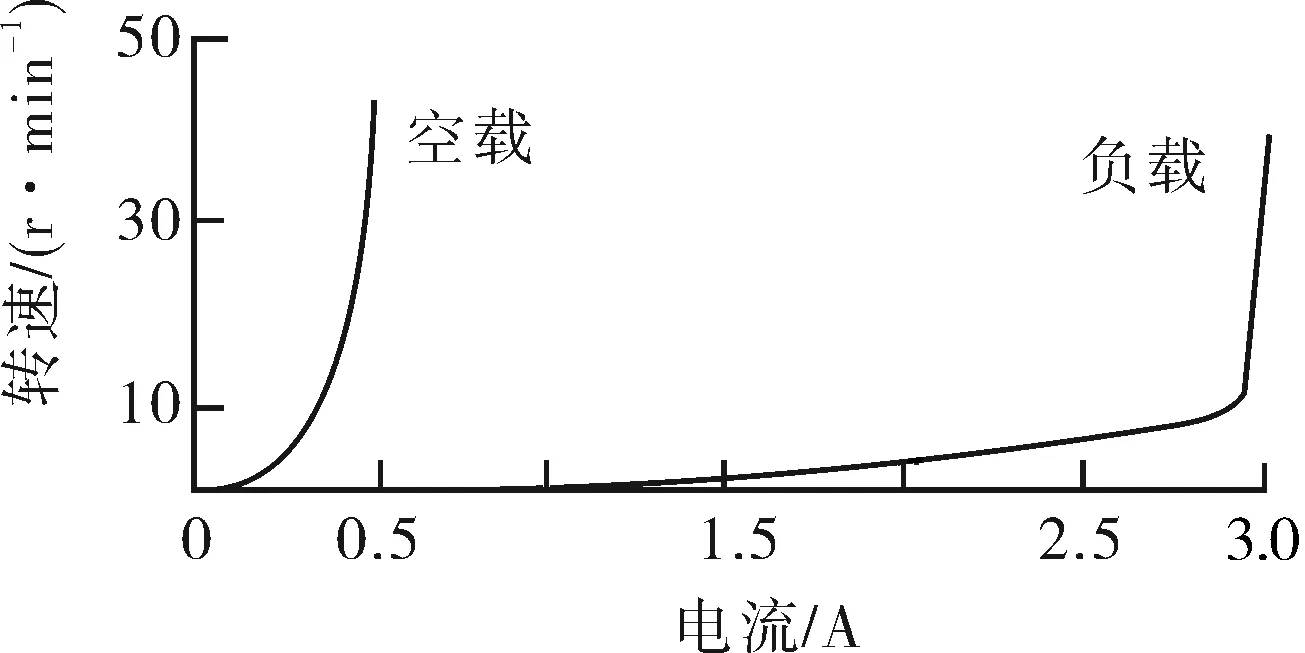
图5 有/无负载时电机电流信号与转速矢量关系
6 结论
1) 针对复杂的钻井井下环境,研究设计了自动纠偏控制系统,并通过试验对系统进行验证。
2) 与传统液压纠偏系统相比,该系统具有电驱响应迅速,调整定位准确;驱动器具有位置记录与断电保护功能,可提高系统安全性;电机通过正/反转的直接控制,实现对导向块运动状态的控制;结构简单紧凑,控制灵活,能耗低等优点。
3) 电控纠偏控制系统可适应井下恶劣工作环境与空间限制,在小直径导向钻井工作中,具有良好的应用价值。
猜你喜欢
西部探矿工程(2022年4期)2022-12-13
大电机技术(2022年5期)2022-11-17
汽车实用技术(2022年12期)2022-07-05
矿产勘查(2020年5期)2020-12-25
电子制作(2017年1期)2017-05-17
凿岩机械气动工具(2016年1期)2016-11-11
电子制作(2016年1期)2016-11-07
汽车实用技术(2015年8期)2015-12-26
凿岩机械气动工具(2015年3期)2015-11-11
汽车维修与保养(2015年12期)2015-04-18
