
参数调制多载波雷达通信共享信号设计
2019-04-04 01:33杨慧婷谷亚彬张林让
雷达学报 2019年1期
杨慧婷 周 宇 谷亚彬 张林让
(西安电子科技大学雷达信号处理国家重点实验室 西安 710071)
1 引言
随着科学技术的发展,现代战争中的装备必须趋向于综合化发展,但同时也不能让过多的设备加剧恶化平台周围的电磁环境、增加负荷,例如无人机,就需在小体积平台上集成多种装备功能,并保持平台的机动性和综合性,雷达和通信系统是平台广泛配备的两种电子系统[1],若能实现雷达通信一体化[2,3],将大大提高电子系统的综合利用率。
雷达通信一体化的理念在20世纪60年代出现以后,对其研究主要分为分时、分波束和同时3种体制。分时体制在通信时不能兼顾雷达探测,即在通信时存在雷达探测盲区,但相对最易实现,故研究的较多;分波束体制将相控阵面划分为不同区域,利用划分的各个阵面实现不同功能;同时体制将雷达信号和通信信号融合在一起,在同一平台同时实现探测与传输功能。其一体化程度最高,是未来雷达通信一体化的发展方向。这种体制的关键技术更多地集中在共享信号设计,而共享信号设计主要需要解决通信数据传输和雷达探测之间的关系。现有的共享信号设计方法基本可分为3类:①雷达与通信信号各自独立产生后叠加[4],②基于通信信号,将其改造成雷达探测波,③基于雷达信号,在其上调制通信数据[5]。文献[6]中研究了利用线性调频信号(Chirp信号)上、下扫频分别作为雷达波形和通信波形,叠加产生共享信号,接收时利用正交性将其分离的一体化系统,但其通信速率受到很大的限制,雷达性能有所降低;文献[7]中研究了利用正交频分复用(Orthogonal Frequency Division Multiplexing,OFDM)信号实现一体化波形,但是OFDM信号不是恒包络,峰均比较高不利于在雷达的C类放大器中放大,且对多普勒频移较敏感,仅适用于短距离通信与探测;文献[8]中研究了将通信最小频移键控(Minimum Shift Keying, MSK)调制到线性调频信号上实现一体化波形,该波形能在实现雷达检测动能的同时完成通信功能;文献[9]研究了通过键控Chirp信号的初始频率来调制通信数据从而实现雷达通信一体化的方法,但是雷达检测处理的匹配滤波器要随着发射信号的改变而改变。
本文提出一种基于Chirp信号参数调制的多载波雷达通信共享信号,主载波用于雷达检测功能,副载波的调频率与初始频率参数可选,从而携带数据实现通信信息调制。在设计共享信号时,通信数据的随机性常使不同脉冲间的信号相关性减弱,而雷达探测为进行相干积累,需在接收端使用与之对应的匹配滤波器,大大增加雷达系统负担,本文所设计信号利用主载波的确定性提高脉冲的相关性,雷达处理系统不需要增加额外单元,采用同原始雷达相同的处理流程;而不同起始频率、不同调频率的Chirp信号能在带宽利用率及正交性之间提供平衡。在文中对所设计共享波形的模糊函数、主副载波之间的正交性等性能进行了分析;在接收端通过分数傅里叶变换,根据检测点的能量聚集位置进行解调。
2 信号设计及实现方法
2.1 共享信号设计
共享信号设计中,在雷达探测波形上调制通信信息后,由于通信数据的随机性,使脉冲波形产生差异性,需要增加额外的雷达信号处理单元,造成负担。为减少脉冲差异性,便于雷达目标检测处理,设计主副载波的共享信号形式,主载波作雷达目标检测,副载波调制通信信息[10,11]。
副载波由待传输码元从一组Chirp信号组{skl(t)}中选取,表达式为

式中,等间隔调频率 ¹k=¹0+kΔ¹;等间隔初始频率fl=f0+lΔf。n=n1+n2位二进制数据中,n1位数据映射N1个调频率,n2位 数据映射N2个初始频率,由通信数据键控映射得调频率为¹k、初始频率为fl的Chirp信号,单个Chirp信号可携带nbit的数据[12]。以n1=3,n2=3的8 bit调制为例,示意图如图1所示,¹ 和f两方向间没有约束关系。

图1 64进制数据调制Fig.1 64 system data modulation
主载波确定为调频率大于副载波调频率选取范围的Chirp信号,即¹r>¹k,带宽覆盖副载波的可用带宽,使得共享信号的带宽始终保持不变,

利用调频率的多样性,给主、副载波提供良好的准正交性[13]。参数选取范围如图2所示,主载波为确定的Chirp信号,副载波为众多参数组合中选取的某一Chirp信号,共享信号表示为

2.2 码元解调
共享信号的通信码元信息利用分数阶傅里叶变换(FRactional Fourier Transform, FRFT)解调,Chirp信号的FRFT变换为

图2 共享信号参数设计Fig.2 Sharing signal parameters design
式中,旋转角度 α=p/2;p为变换阶次。FRFT变换与Chirp信号的调频率、初始频率参数间的关系满足

如图3所示,只有在最优阶次的FRFT变换时,在分数阶傅里叶域上才有峰值输出。接收端对接收到的共享信号进行FRFT变换,检测峰值,得到峰值所在的变换阶次与分数阶傅里叶域坐标,由FRFT变换与Chirp信号参数之间的关系,解得副载波的调频率与初始频率,从而映射出调制的码元数据[15]。
2.3 实现方法
首先根据设定的映射规则,将通信数据映射到对应的初始频率、调频率的Chirp信号序列中,在接收端通过分数阶傅里叶变换进行解调。一体化框图如图4所示,在发送端,将通信数据串并转换后分成n位一组,前n1位 键控得调频率,后n2位键控得初始频率,产生一个特定的Chirp信号,与主载波确定Chirp信号叠加组成共享信号,送入高斯白噪声信道。
在接收端,雷达处理系统与常规雷达相同,不会增加额外处理单元。通信处理系统,对回波进行分数阶傅里叶变换,依次进行p0~pN1-1阶FRFT变换,将变换后FRFT域u0~uN2-1位置处的采样点设为检测点,对其数据进行门限判定,得到超过阈值的检测点的阶次pk和位置ul,并根据映射关系解调出通信码元数据。
3 参数设计
为满足通信解调准确率与雷达目标检测分辨率,需对共享信号各参数进行设计。
3.1 副载波{μk}的设计

图3 不同阶次FRFT变换图Fig.3 FRFT graphs of different orders

图4 共享信号实现框图Fig.4 Block diagram of realizing sharing signal
副载波 {μk}直接影响数据传输速率及解调性能;固定信号脉宽τ,μ¹越大Chirp信号占用的带宽越大,{μk} 的最大取值被带宽所限制;{μk}对应n1位二进制通信信息,初始频率fr相同时相邻的μk和μk+1对应的两个最优分数阶傅里叶变换阶次pk和pk+1的间隔Δp决定了采用分数阶傅里叶变换进行解调时对相邻符号的区分度,即 Δp决定了相邻符号间的干扰程度。由式(5)推导可得 Δp与¹k,¹k+1具有以下关系:

对Chirp信号进行非最优阶FRFT时,分数傅里叶域谱不具有聚集性质,而且随着变换阶次偏离p的程度Δp增大,FRFT的峰值明显下降;同时调频率越大,随Δp增加下降得更快[16]。图5仿真了不同 Δp下归一化峰值的变化趋势,归一化调频率分别为0.1, 0.3, 0.5, 0.7, 0.9,脉宽相同,从图中看出,随 Δp增大峰值幅度降低;要使得FRFT解调输出能唯一确定峰值点对应参数,可根据所需要求设定峰值幅度门限,若设定FRFT峰值幅度门限为-10 dB,则{μk} 的 设计要使得Δp至少为0.03。

图5 FRFT幅度峰值随阶数偏移变化Fig.5 Change of FRFT amplitude peak with order deviation
3.2 副载波{fl}的设计
为使具有相同调频率μk、不同初始频率fl的Chirp 信号在分数傅里叶域上可以区分,相邻的fl和fl+1对应的分数阶傅里叶变换域上的两个谱峰位置ul和ul+1的 间隔Δu决定了采用FRFT进行解调时对n2位 数据中相邻符号的区分度,即Δu决定了相邻符号间的干扰程度。由式(5)推导可得 Δu与fl,fl+1存在如下关系:

对Chirp信号进行最优阶FRFT变换时,需要在u轴上能根据峰值幅度区分出fl和fl+1,由Chirp信号的分数傅里叶域的幅度谱

第1零点间距离为 |2sinα/τ|,{fl}的设计应使得Δu满足

4 性能分析
4.1 模糊函数分析
模糊函数表征了波形的距离与多普勒分辨率等特性。共享信号s(t)=sr(t)+skl(t), -τ′/2≤t≤τ′/2的模糊函数为
由表达式可看出,可将共享信号的模糊函数分为主瓣区域χM与邻道干扰项χI。主瓣区域χM为主、副载波的自模糊函数之和,表示为
而邻道干扰项 χI由主、副载波间的互模糊函数之和表示,是应该尽量抑制的部分。

式中,f1,¹1为主载波参数,f2,¹2为副载波参数,

由于无法求得模糊函数的具体表达式,故对其模糊函数进行了统计意义上的仿真分析,仿真参数同第5节,主瓣区域为两Chirp信号模糊函数叠加,而邻道干扰性是由两项主、副载波的互模糊函数之和,其幅度相较于信号模糊函数的峰值,幅度较低,由多次仿真得到,邻道干扰项幅度峰值的平均值仅为模糊函数峰值的2.2%,方差为0.000115,且峰值不位于速度-距离平面原点,故认为模糊函数主要由主瓣区域决定。随调制数据的改变,多普勒切片的主瓣宽度变化范围均低于 1 /τ,第1旁瓣峰值随调制数据在-13 dB上下变化;时延切片的主瓣宽度在1/B上下变化,第1旁瓣峰值在-12 dB上下变化;故当利用发射的共享信号进行匹配滤波时,性能将有所下降。图6仿真了调制某一数据的共享信号的主瓣区域模糊函数图和邻道干扰项的模糊函数图,主瓣位于速度-距离平面原点处的峰值幅度最高。
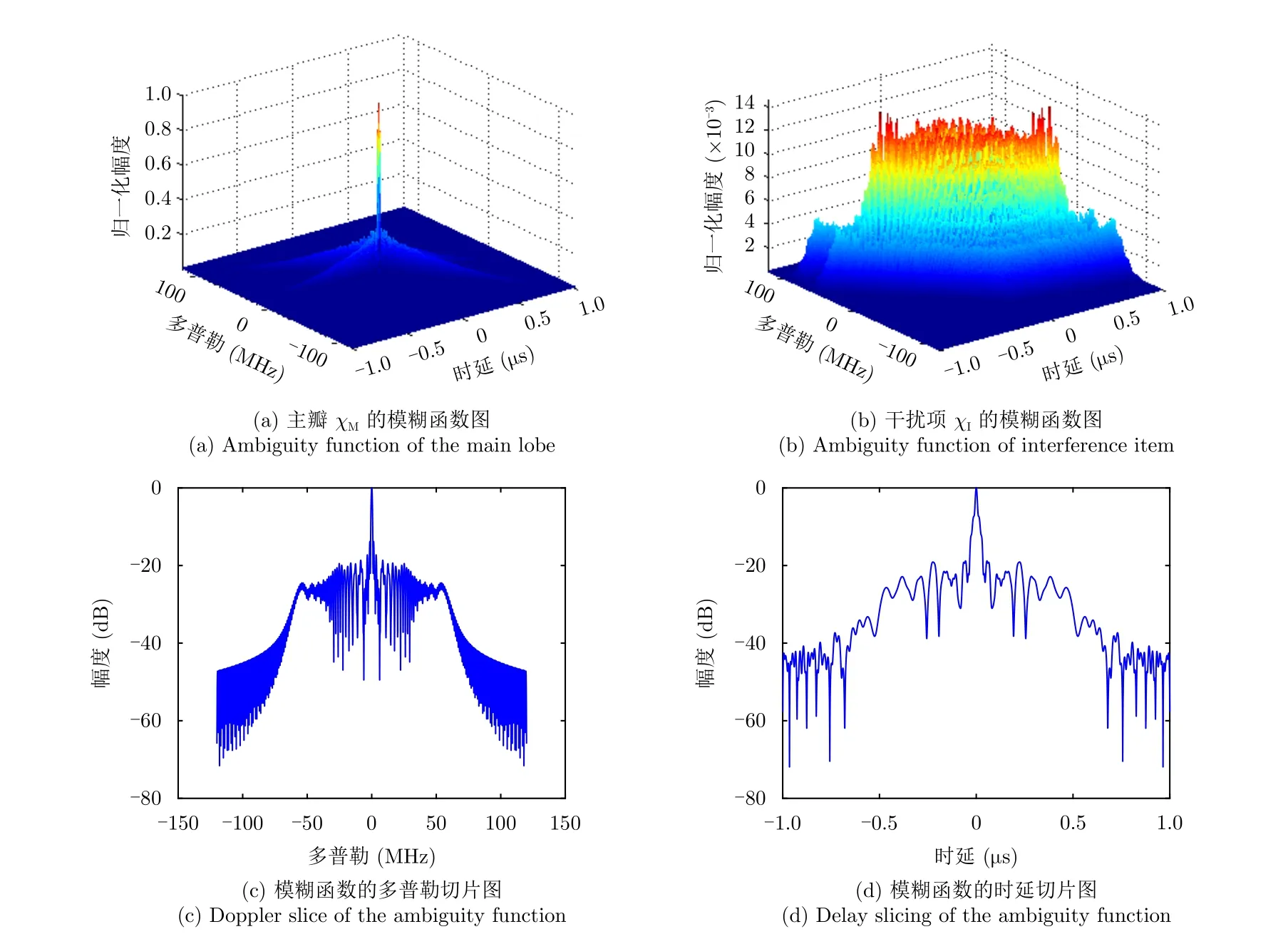
图6 共享信号的模糊函数图Fig.6 Ambiguity function of sharing signal
4.2 主载波与副载波正交性分析
主副载波间的互相关性决定了在接收端进行匹配滤波时副载波的剩余量。主载波与副载波信号表达式如下:
其中,-τ′/2≤t≤τ′/2τ′,为信号脉冲宽度。相关函数为
式中,积分区间 [t1,t2] 取决于τ,当0 ≤τ≤τ′时,t1=-τ′/2,t2=τ′/2-τ; 当时,t1=-τ′/2-τ,t2=τ′/2 。令γ(t)=

互相关值取决于主副载波的调频率差值以及频率差值与调频率差值的比值。根据前述参数设计主载波副载波对载波自相关特性及互相关特性进行了仿真,由图7可看出,主副载波的互相关值比主载波的自相关值低35 dB,表明在接收端进行匹配滤波时,副载波剩余量很小。模糊函数表征利用发射信号进行匹配滤波的输出,性能有明显下降,但本文中,主载波保持不变,仅利用主载波进行匹配滤波时,探测性能的降低量将变小。

图7 主、副载波互相关函数Fig.7 Cross correlation function of main carrier and subcarrier
4.3 雷达通信功率分配分析
共享信号由主载波与副载波叠加得到,则用于雷达探测的功率会有所下降,但主、副载波功能相互独立,故可调整主载波与副载波的不同功率配比,增加用于雷达探测的功率。
雷达探测目标由以主载波为参考信号的匹配滤波器进行脉压处理,处理结果基于主载波与各脉冲共享信号的相关性,相关性表示为主载波的自相关函数与主、副载波的互相关函数之和:
由4.2节分析可知,主、副载波的互相关函数相较于主载波的自相关函数幅度很低,故雷达探测结果受副载波分量影响很小。
主副载波的功率分配决定了用于雷达探测的功率,可在适当范围内提高主载波的功率以用于雷达探测,表1列出了在不同主、副载波功率比时,主载波与几组不同参数下的共享信号之间的互相关系数,从表1中可以看出,主载波所占功率越大,相关系数越接近于1,雷达探测性能越好。

表1 主载波与不同主副功率比下共享信号的互相关系数Tab.1 Cross-correlation coefficient of shared signal under different power ratios

图8 主副载波功率比9:1时FRFT输出Fig.8 FRFT output at main and subcarrier power ratio of 9:1
增加了主载波的功率后,副载波的功率必然会下降,利用FRFT变换的解调性能会有所下降,如图8所示,在主、副载波的功率比为9:1时,FRFT变换的旁瓣在略微升高后,依然能保持在-10 dB左右,能检测到明显峰值,解调出码元数据,但是主副功率比不能无限制增大,主载波功率过高时,在FRFT解调输出谱中会覆盖掉峰值,无法解调出数据,功率比越高,误码率越差,可根据应用条件选择主副载波的功率比。
4.4 多普勒频移对解调的影响
雷达与通信接收端之间的相对运动会存在多普勒频移fd,此时接收Chirp信号形式为

多普勒频移fd可看作是初始频率fc偏移,调频率¹ 不受影响,对应的是分数阶傅里叶域上的峰值位置,而峰值幅度不变,则解调器输出峰值位置偏移量和检测点幅度平方输出分别为

多普勒频移fd带来的幅度平方衰减系数为

由式(22)可看出衰减系数只与多普勒频移fd和信号脉宽τ 有关,fdτ达到0.5时幅度衰减尚不到0.1,可知多普勒频移对检测点幅值影响较小,说明本文所设计的共享信号对多普勒是稳健的。
4.5 误码率分析
本文调制方式需要考虑调频率与频率的配比,设比特宽度为Tb,仅对调频率键控时,M=2n进制符号宽度为Ts=Tbn,由于调频率¹k是变化的,不同符号键控输出的Chirp信号的扫频带宽 ¹kTs也是变化的,其最大宽度由最大的 ¹kmax决定。则调频率键控方式的带宽效率η 满足:

MFSK (Multiple Frequency-Shift Keying)的信道带宽理论值为Rb(M+3)/2n(相干MFSK),则MFSK的带宽效率为

因此,当¹kmaxTs2<(M+3)/2即用于调频率键控的Chirp信号的最大时宽带宽积τBmax<(M+3)/2时,调频率键控有优于MFSK的带宽效率。而MFSK的误码率性能优于调频率键控,故调频率键控与频率键控同时使用时,可以通过调整2种调制方式的配比,在误码率性能与带宽效率间折中选择。
5 仿真实验
在仿真实验中,设定二进制数据对8调频率与8初始频率的64个Chirp信号进行调制,根据第2部分要求设计仿真参数为:射频fp=10GHz,时宽τ=1s,占空比10%,带宽B=120MHz,主载波频率fr=0MHz,调频率¹r=120MHz/μs;副载波调频率组¹k=[15,27,39,51,63,75,87,99] MHz/μs,频率组fl=[0,3,6,9,12,15,18,21]MHz,主副载波功率比为1:1,目标参数[ 1000m,200m/s]。
5.1 雷达性能分析
因主载波Chirp信号的初始频率fr=f1,调频率 ¹r>¹k在可用范围内达到最大,则主载波的频谱带宽内包含了副载波用于通信的所有频谱带宽,主载波用于雷达目标检测,接收机利用匹配滤波器对回波进行脉压处理,结果如图9。
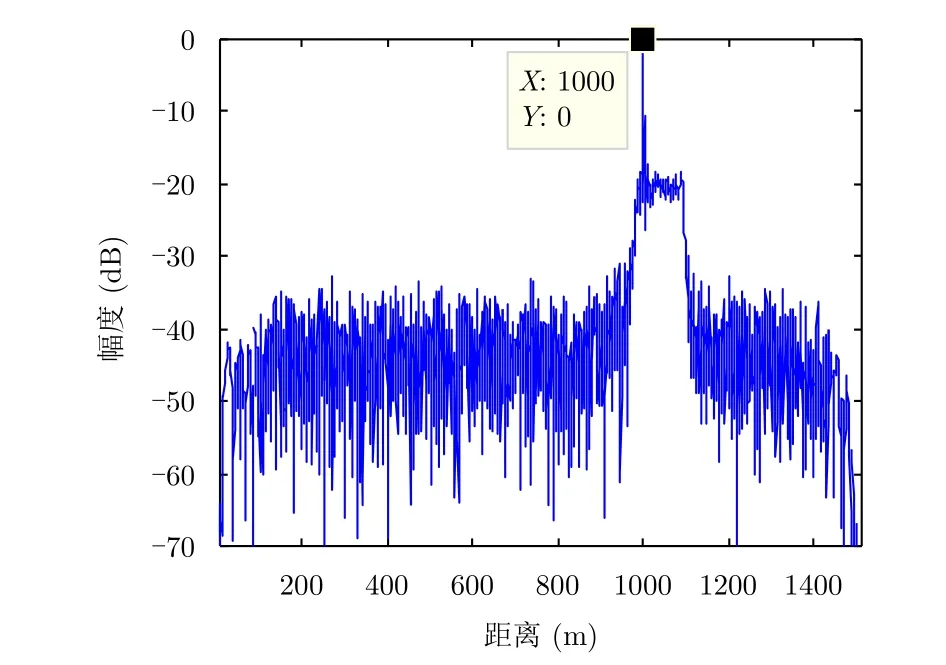
图9 脉压结果Fig.9 Pulse compression result
分析知主、副载波互相关性较低,不影响雷达的目标检测,第1旁瓣依然在-13 dB左右,经过匹配滤波器后副载波剩余量很小,幅度保持在-20 dB以下,而且增加主载波的功率后,剩余量幅度会更低,经过匹配滤波器后的回波脉冲串有很高的相关性,经过多普勒滤波器组进行动目标检测(Moving Target Detection, MTD)处理即可得出目标相对速度,表明在接收端仅需使用单一滤波器即可完成,测速结果如图10所示。
在虚警概率等于10-4条件下,本文共享信号进行脉压处理和不同脉冲数积累MTD处理后,检测概率与信噪比(SNR)的关系曲线如图11所示,脉压与MTD处理利用相干积累提高了SNR,由于本文共享信号存在通信副载波分量,故与同参数下的单Chirp信号相比,检测概率有所下降;但在进行MTD相干处理后,提高了SNR,从而改善检测概率,而且相干积累的脉冲数越多,检测概率越优,故采用较多脉冲积累来弥补共享信号雷达检测性能降低的不足。
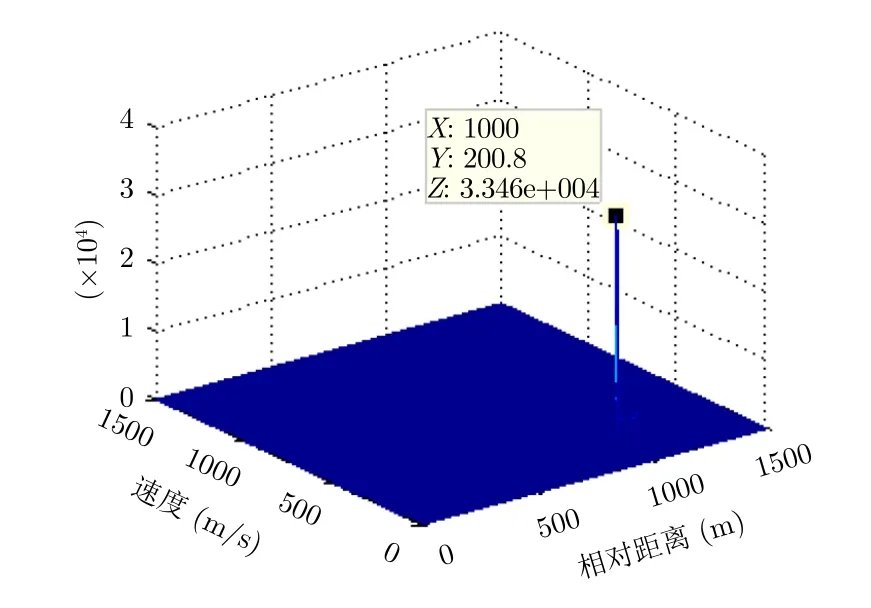
图10 动目标检测结果Fig.10 MTD result

图11 检测概率与信噪比关系曲线Fig.11 Curve of relationship between detection probabilityand signal-to-noise ratio
5.2 通信性能分析
副载波通过键控Chirp信号的调频率与初始频率来调制通信数据,通信接收端对回波进行{μk}对应的 2n1个固定阶次的FRFT处理,在{fl}对应的2n2个固定位置处检测幅度值,得到上述2n1×2n2个检测点中幅度值高于设定阈值的检测点对应的阶次p 和位置u,即可解调出调制进制数据。
调制数据时,将通信数据串并转换并分组后,根据数据组的大小排列方式可在共享信号中叠加多个副载波,若后一组数据大于前一组数据,则可将这两组数据调制到同一共享信号中,则此脉冲就有多个副载波,通信接收时不需要改变解调方式,每个副载波携带的数据均可解调出,只需将数据组按大小排列,以此提高通信速率;若后一组数据不大于前一组数据,则后组数据在下一脉冲调制。因此,此共享信号的通信传输速率在nPRF~2n⋅nPRF范围内变化,n=n1+n2为单个副载波携带的比特位数。若仅采用主载波叠加单个副载波的形式,此仿真参数下的通信速率为n PRF=600kb/s,通过改变参数增加调制位数可得更高传输速率。
AWGN信道中,本文共享信号的误码率仿真曲线如图12所示,从上往下第3, 4, 5条曲线为64进制调制的3种不同配比,即16K-4F, 8K-8F和4K-16F, K表示调频率,F表示载频,由图12可见这3种方式的误码率性能逐渐改善,根据4.5节分析得知,这是由于FSK的误码率性能优于调频率调制,通过改变调频率与初始频率的不同配比可以调整本文共享信号的抗干扰性能与带宽效率。图中给出数字调制中的键控法MFSK, MASK, MPSK的理论误码率曲线作为对比参考,随着调制位数M的增大,MASK和MPSK的抗噪声性能下降,频带利用率上升,而MFSK抗噪声性能更好,有更好的误码率性能,但频带利用率较差[17]。
6 总结
本文设计并研究了一种多载波雷达通信共享信号,通过对副载波Chirp信号的调频率与初始频率键控调制通信数据,利用主载波进行雷达目标检测。对共享信号的模糊函数及主副载波间的正交性进行了分析,对Chirp信号参数间关系进行设计,在通信接收端采用FRFT变换进行解调,并对共享信号的抗多普勒性能进行了分析。共享信号的设计实现了复杂集成电子装备平台中,雷达和通信信号能量和时间的一体化,这将是未来一体化电子战系统的一个重要的发展方向。

图12 误码率随信噪比变化曲线Fig.12 Change of error rate with SNR
猜你喜欢
中国畜牧杂志(2022年10期)2022-10-12
中国空间科学技术(2021年1期)2021-03-16
现代计算机(2020年12期)2020-06-08
中国航海(2019年2期)2019-07-24
电机与控制学报(2018年9期)2018-05-14
移动通信(2017年11期)2017-06-20
中学生数理化·八年级物理人教版(2016年5期)2016-08-26
中学生数理化·八年级物理人教版(2016年5期)2016-08-26
新高考·高一物理(2015年3期)2015-08-20
