
T型三电平拓扑结构的控制
2019-04-02 09:59:16陈玲,纪萍
长春工业大学学报 2019年1期
陈 玲, 纪 萍
(河海大学文天学院, 安徽 马鞍山 243031)
0 引 言
随着现代电力电子技术的发展,双极型复合自关断器件取得迅猛的发展,促进高压大容量变流器技术的进步,尤其是多电平拓扑结构的逆变器技术逐渐成为大功率变流器的研究热点[1-4]。多电平逆变器优点显著,如输出电压谐波小、所需器件耐压低和开关损耗低等,使其在众多中高压大功率场合得到了广泛应用[5]。其中,三电平拓扑结构以结构简单、控制方便等更是得到迅猛发展[6]。文中在T型三电平拓扑结构的基础上对T型三电平逆变系统的原理及控制策略进行了分析,建立了一定的理论依据,在此基础上设计了硬件电路,并对系统进行了软件设计,完成了实验。通过实验验证了控制方法的有效性。
1 T型三电平逆变系统控制原理
T型三电平逆变系统主电路拓扑结构如图1所示。
每相桥臂有4个功率开关器件,上下桥臂各包含一个功率开关管,而另两个功率开关管反向串联后与直流侧电容在中点处相连,其结构形状像字符“T”,因此,称这种结构为T型拓扑。当系统输出低电平或者高电平时,由于电流流经器件个数较少,导致对应的导通损耗也会下降[7]。
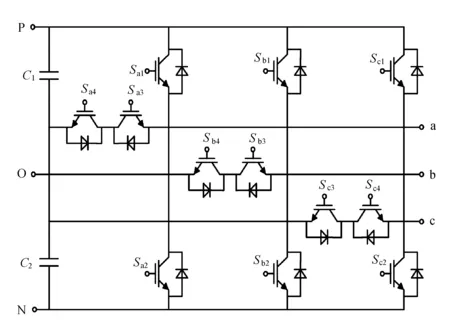
图1 T型三电平主电路拓扑
图1中,设直流电压为Ud,由于直流侧电容C1=C2,则Udc1=Udc2=Ud/2。若以直流侧电容中点0为参考,则每相桥臂可输出电平:Ud/2、0、-Ud/2。若这三种电平对应状态P、O和N三种电平状态。则单相桥臂输出不同电平时对应的开关状态见表1。
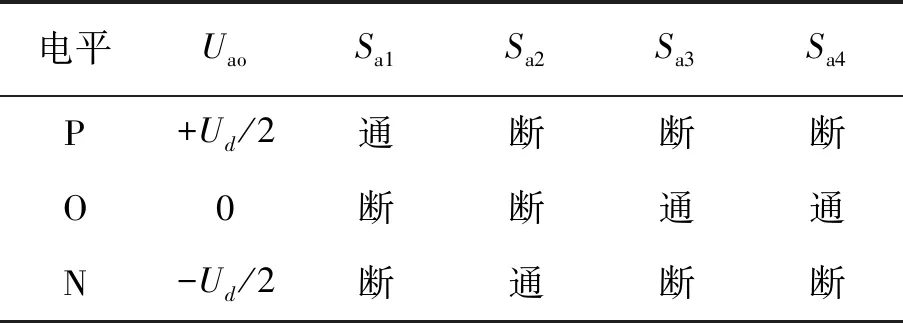
表1 不同电平对应的单相开关状态
由此,三相T型三电平逆变系统共有27个开关状态,可组成19个有效的空间矢量。其中,零矢量1个,对应了3个开关状态;小矢量6个,对应了2个开关状态;中矢量和大矢量各6个,分别对应1个开关状态。三电平空间矢量图[8]如图2所示。
将这27个开关状态利用三电平空间矢量调制算法SVPWM是在逆变系统的一个工作周期中用6个大基本矢量将矢量空间分成6个区域,再将期望的旋转参考矢量在α-β坐标系上进行分解,同时,利用正六边形空间矢量图来判断参考矢量所在的扇区来完成合成矢量作用时间的计算。根据基本电压矢量的调制方式和作用时间,可以获得三相桥臂各开关的驱动信号,从而实现三电平逆变系统的SVPWM控制。即各输出电平对应的开关状态,给予对应的开关管触发脉冲即可实现逆变系统的PWM控制[9]。三电平逆变系统PWM波形示意图如图3所示。
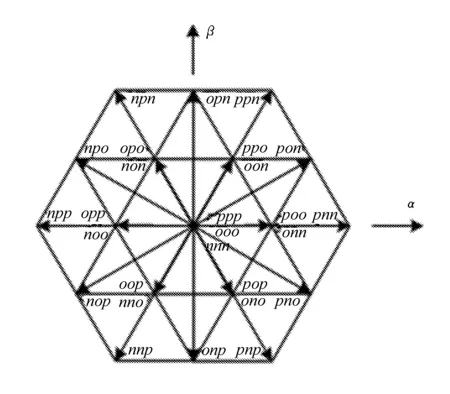
图2 三电平逆变系统基本电压空间矢量图
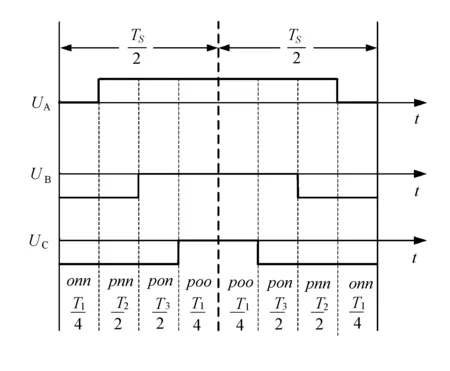
图3 三电平逆变系统PWM波形示意图
2 系统硬件结构
2.1 系统硬件组成
T型三电平逆变系统的控制主要由dsPIC与FPGA结合实现,T型三电平逆变系统结构如图4所示。
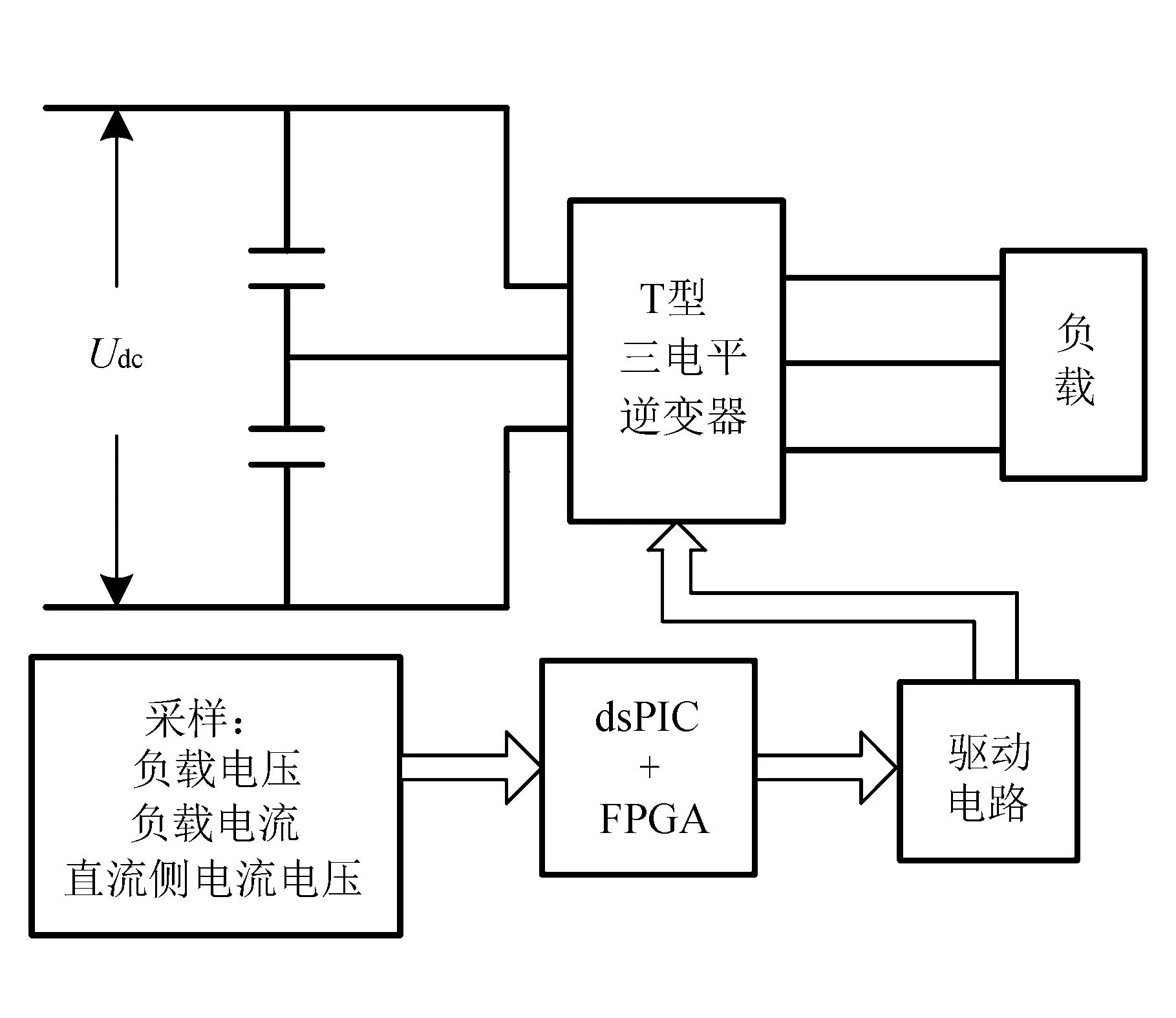
图4 T型三电平逆变系统结构
首先采集电路中所需的电压及电流信号,然后通过控制算法进行计算,得到开关管的控制脉冲信号。再将脉冲信号送入驱动电路,最终利用其实现开关管的通断控制。由此,系统实现电能直流交流变换。
2.2 系统主电路设计
三电平逆变系统主电路采用共集电极式T型三电平拓扑结构(见图1),左侧接直流电源,右侧接星型阻感负载。由于文中只是研究了T型三电平拓扑的控制策略,因此实验中的功率较小,直流侧电压为30 V。
系统直流侧存在中点电位平衡问题,故用容值较大的电容来适当抑制中点电位波动,因此选用3 300 μF/100 V的电解电容作为直流侧分压电容。逆变桥功率开关管选用MOSFET。
2.3 系统控制电路设计
电压驱动型功率器件选为电力MOSFET,其开通电压为10~15 V,考虑关断速度,选择关断电压为-5~-15 V的负电压,因此,实验选择TOSHIBA公司的光耦隔离型驱动芯片TLP250,对应驱动电路如图5所示[10]。
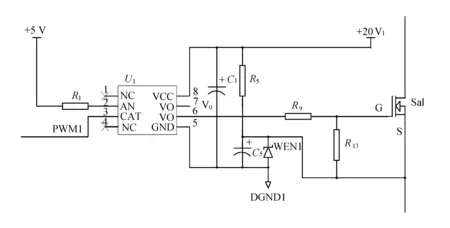
图5 TLP250驱动原理图
考虑系统各开关管驱动电路之间易形成干扰,需对芯片的电源部分进行相应隔离。由于本系统T型三电平逆变器采用共集电极接法,至少需要5路独立的驱动电源。因此,实验中采用SAPS公司的AC/DC电源模块制作了一个电源板,实现了由交流220 V转换得到的24 V直流电源,然后通过5个MORNSUN公司的DC/DC隔离电源模块获得5路相互隔离的直流电源为TLP250芯片供电,在方便供电的同时确保了驱动电路的稳定性。
系统实验中,还需进行采样电路设计和保护电路设计。采样信号主要有直流侧电压、电流过零点检测及三相输出电压电流等。
3 系统软件部分设计
考虑T型三电平逆变系统主电路中含12个功率开关,因此,正常工作时共需要12路PWM控制信号。T型三电平逆变系统采用FPGA和dsPIC芯片相结合来实现控制。6路PWM逻辑控制信号由dsPIC通过控制程序生成,经FPGA译码并进行死区处理,最终产生12路控制信号,实现逆变桥的控制。
3.1 系统控制模块设计
系统控制模块中的T型三电平SVPWM算法的实现主要由dsPIC芯片承担。通过软件设计使PWM引脚输出相应的电平状态,以控制T型三电平逆变系统每个桥臂。系统控制模块的硬件结构如图6所示。

图6 系统控制模块结构
图中dsPIC的PWM模块每组两个输出引脚PWMxH和PWMxL输出的电平有“00”“01”“10”,分别表示T型三电平逆变系统的零电平、低电平和高电平状态,而“11”则不应该出现,以下在软件设计中将加以界定。dsPIC的6组PWM模块产生的逻辑信号,经FPGA进行译码,得到相应的电平对逆变系统的6个开关器件进行控制,在此基础上加上死去时间,最后实现12路开关器件的有效控制。
3.2 系统dsPIC程序设计
系统软件设计包含dsPIC和FPGA程序设计,其中dsPIC程序采用C语言进行编程[11],而FPGA则采用VHDL语言进行编写[12]。dsPIC程序软件主要包括算法主程序及中断服务子程序。
在系统进行时钟源配置、特殊功能配置、所需系统外设、I/O端口等初始化后,再对系统变量进行定义和赋值,最后执行系统的主程序。具体程序流程如图7所示。
系统根据三电平控制规律判断各自对应扇区信息,从而确定具体作用矢量,在此基础上,计算各矢量对应的开关状态以及时间,这也是主程序的核心,即三电平的算法模块。

图7 dsPIC算法程序流程
3.3 系统FPGA程序设计
系统FPGA程序设计如图8所示。
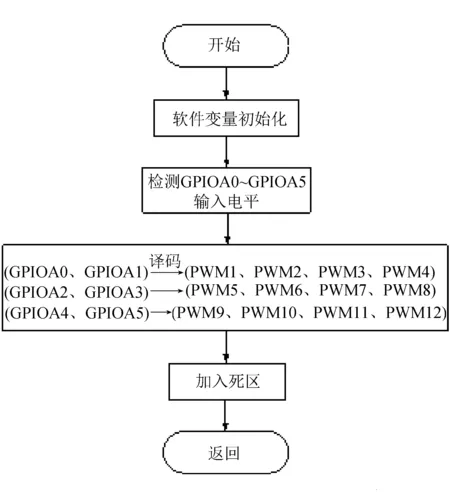
图8 FPGA程序流程
系统首先接收dsPIC发送相应时间的开关状态信号,通过FPGA进行译码,加上死区时间,由6路的逻辑信号变成12路的开关器件控制信号。
4 实验结果分析
通过T型三电平逆变系统原理的分析,并进行了一定的仿真,建立了理论依据。在此基础上搭建了T型三电平逆变系统的实验装置,进行了相应的小功率实验。实验中的直流电源采用了直流稳压电源,以保证系统的稳定与安全。
逆变系统A相输出相电压波形如图9所示(此时系统为空载)。

图9 空载时A相相电压输出波形
可见,相电压输出波形有+Udc/2、0和-Udc/2三个电平值,呈现了逆变系统的三电平特性。
T型三电平逆变系统输出的线电压波形如图10所示(此时系统仍为空载)。
可见,系统线电压输出有5个电平,并且将其滤波后,得到波形为50 Hz的正弦波。

(a) 滤波前输出波形
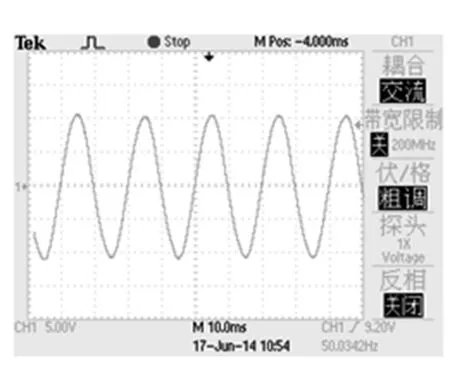
(b) 滤波后输出波形
5 结 语
在T型三电平拓扑结构的基础上对T型三电平逆变系统的原理及控制策略进行了分析,采用空间矢量调制算法,对开关管的开关状态进行控制,合理分配PWM时序,有效降低了功率器件开关损耗。在此基础上搭建了T型三电平逆变系统实验平台,对系统进行了软硬件设计,并对控制方法进行了实验验证。实验结果验证了系统及控制方法的可行性和有效性。
猜你喜欢
测控技术(2021年10期)2021-12-21 07:10:20
中学生数理化·高一版(2021年11期)2021-09-05 12:21:24
通信电源技术(2018年3期)2018-06-26 06:33:32
现代防御技术(2016年1期)2016-06-01 12:13:28
电测与仪表(2016年22期)2016-04-12 00:19:58
新高考·高一物理(2016年1期)2016-03-05 22:47:39
电源技术(2015年11期)2015-08-22 08:50:36
电子工业专用设备(2015年4期)2015-05-26 09:10:33
电测与仪表(2015年10期)2015-04-09 11:48:02
电测与仪表(2015年2期)2015-04-09 11:28:58
