
基于升降副翼混控的格斗机器人研究
2019-03-30 02:10殷春海
四川文理学院学报 2019年2期
李 斌,殷春海
(四川文理学院 智能制造学院,四川 达州635000)
当前,机器人技术与前沿技术正在迅猛发展,相关学科在相互交流中加速融合.[1]一些发达国家已经把机器人比赛作为创新教育的战略手段.[2]我国各个地方也相继举办了相应的机器人比赛.笔者设计这款机器人主要是针对机器人格斗比赛而设计的.比赛规则是将对方机器人推出场地之外而自己的机器人不能出界,或将对方机器人推入陷阱,或将对方机器人压制使其失去反抗能力.根据要求,设计了升降副翼混控的格斗机器人.
1 机器人的总体结构设计
机器人总体结构设计分为两部分,包括车身设计、护壳设计.车身设计是动力驱动的主要核心,采用两轮驱动,同时前方还安装了牛眼轮.这样,一方面可以使车身运动更加灵活,通过两轮的差动转速,可以实现快速的转向.另一方面可以增加格斗机器人的攻击力度,两轮同时进行加速,机器人达到最大的攻击系数,对对方机器人造成最大的伤害.在前方加了一个牛眼轮,使机器人在格斗和运动的过程中更加稳定可靠.
护壳设计由底板和外壳两部分组成.在设计时底板用45钢,在机器人四周焊接碰撞体,防止对方的攻击,在前方制作武器,以提高机器人的攻击性能,来压制对方机器人的攻击.在底板上进行打孔等措施,来固定两轮的驱动电机、电池盒等.此外,在顶部和四周用铁皮焊接外壳,用来保护主电路和其它电气设备.机器人总体结构设计见图1.

图1 机器人外观设计
2 控制系统
基于升降副翼混控格斗机器人的控制系统主要由升降副翼混控、电机驱动电路和天地飞八远程遥控器三个部分组成.控制系统的组成如图2所示.
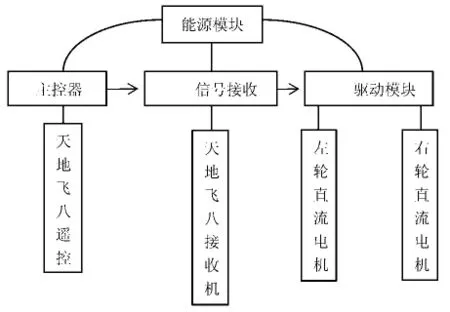
图2 机器人控制系统
2.1 硬件构成
2.2.1 电池、电调、开关
控制电路包括深圳飞科达遥控模型技术有限公司的电机电子调速器(FSESC 4.12 50A),电源模块,升降副翼混控,飞八接收机,美国手天地飞八遥控.电机电子调速器(FSESC 4.12 50A)需要提供22.2V的工作电压,用电压为22.2V的电池为其提供电源,天地飞接收机接在电机电子调速器上,并为接收机提供5v的电源电压.同时,在外围电路设置了开关.一方面可以实现机器人的正常启闭,当机器人失控时,可以直接切断电源,得到控制,以免造成其它不必要的损失.另一方面可以方便的给机器人电池充电.
2.2.2 主控器
本次制作主要运用天地飞八主控器的混控功能.混控是遥控器正常操作一个动作只控制接收机一个通道的动作,但有时候需要一个操作同时使管两个或两个以上的通道动作,这个就是混合控制.本次笔者使用的是升降副翼(三角翼)混控:升降副翼混控就是升降操作杆同时具备副翼操作杆功能,两个电机同向运动可以控制前进后退,两个电机反向运动可以控制左右转弯.主控器通过发出脉冲信号来控制.[3]脉冲信号是一个按一定电压幅度,一定时间间隔连续发出的脉冲信号.脉冲信号之间的时间间隔称为周期;而将在单位时间(如1秒)内所产生的脉冲个数称为频率.频率是描述周期性循环信号(包括脉冲信号)在单位时间内所出现的脉冲数量多少的计量名称;频率的标准计量单位是Hz(赫).
以下是天地飞八升降副翼混控的部分调参数据见表1

表1 升降副翼混控调参数据
2.2.3 信号接收模块
机器人信号接收模块是WFR09S接收机.WFR09S接收机采用双核双天线双路接收,自动选择追信号,提高响应速度,增加了使用距离.增强了可靠性和抗干扰性.在安装过程中,两根天线程90度安装,才能更好发挥WFR09S的性能.
接收机通电后,打开主控器解锁对码成功后.升降杆推动后,发出脉冲信号,接收机收到脉冲信号后,控制电路的通断.
2.2.4 电机驱动模块
本次研究,机器人电机驱动模块,由行星直流电机、电机电子调速器(FSESC 4.12 50A)组成.接收机接收到主控器的信号后,再发出一个信号,它可以驱动继电器、直流电机,步进电机等元件.[4]运用混控可以控制双电机同时失电和得电,还可以控制电机的正反转.电路简单,电机动力十足,操作起来十分方便.此电路使用了两个电机电子调速器,分别驱动左右电机,来实现机器人前后左右的快速运动.机器人电机驱动见表2.

表2 机器人驱动
2.2 攻守策略
机器人的整个操作流程图如下,见图3.

图3 机器人操作流程图
在机器人格斗比赛中,在有限的时间内将道具推入陷阱内方可得分.这一环节机器人需要解决两个方面的问题.一方面,需要解决的是速度.另一方面,需要解决机器人的运动稳定性,由于在比赛过程中需要推道具,必须具备可靠的运动稳定性,使机器人平稳的推动道具.机器人在格斗时,需要解决两个方面的问题.一方面机器人需要强大的动力和攻击性.在格斗环节,需要把对手推入陷阱内或者推出赛场界外,所以需要强大的动力,才能推动对手.另外需要较高的攻击性,才能压制对手的进攻,使其失去反抗能力.另一方面,需要解决机器人的防滑性能,由于场地防滑性能不是很好,只能使机器人的两轮增大摩擦力,进行防滑.本文中的格斗机器人基于上述的问题进行了设计并解决问题,使机器人的性能达到最优.
机器人的性能达到最优后,在制敌上需要一定的攻守策略.机器人在格斗过程中,根据对手的攻击动作,机器人做出相应的攻防动作,直至把对手推入陷阱、推出比赛赛场、压制对手的攻击.操作手根据对方机器人的方位进行相应的操作.[5]具体情况如下,见表3.在四川省第三节大学生机器人大赛上,本文中设计的格斗机器人进行了实际测试.比赛过程中,机器人凭借自身的良好性能设计以及攻防策略,赢得了观众的好评.
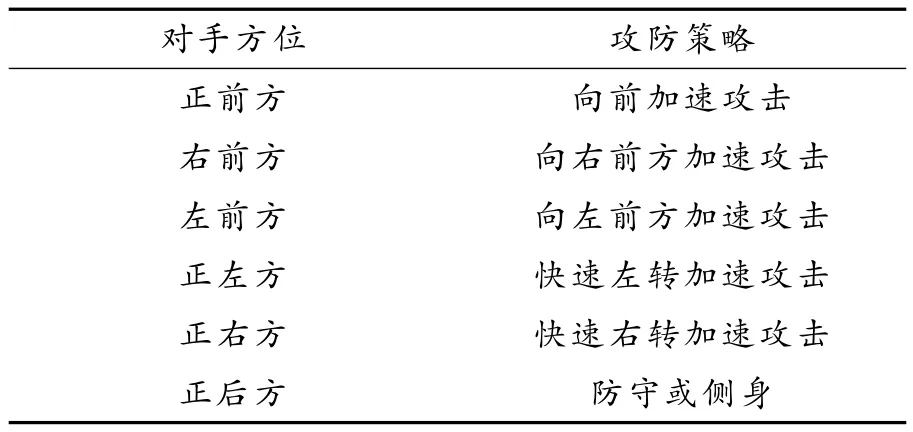
表3 机器人攻防策略
结 语
本次研究以升降副翼混控为控制核心,研究设计开发出了动作灵活、操作方便、结构简单、成本低、娱乐刺激性的升降副翼混控的格斗机器人.经研究证明,该机器人可以完成防守、攻击、快速平稳的推动道具等功能,对机器人的发展有一定的意义,具有一定的娱乐性和实际应用价值.
猜你喜欢
导航定位学报(2022年1期)2022-02-17
智能制造(2021年4期)2021-11-04
民用飞机设计与研究(2020年1期)2020-05-21
海峡姐妹(2019年12期)2020-01-14
电子制作(2019年24期)2019-02-23
电子制作(2018年19期)2018-11-14
北京航空航天大学学报(2017年3期)2017-11-23
少年文艺·开心阅读作文(2017年11期)2017-11-14
儿童故事画报(2016年7期)2017-02-08
电子制作(2016年1期)2016-11-07
