
卫星导航进近技术进展
2019-03-29 06:54喻思琪张小红郭斐李昕潘林马福建
航空学报 2019年3期
喻思琪,张小红,郭斐,李昕,潘林,马福建
武汉大学 测绘学院,武汉 430079
近年来,随着中国经济的高速发展,民用航空呈现出繁荣的景象。根据民航的十三五规划,预计到2020年,运输机场的数量增加至260个,通用机场将达到500个以上,通用航空器达到5 000架以上,飞行总量达到200万小时[1-2]。终端进近技术是指通过仪器设备为飞机在着陆时提供精密的方位和下滑引导的技术。稳定、可靠的终端进近技术是保障民航安全运行的关键技术之一。当前,随着高性能终端区对导航性能要求的进一步提升,以及有限的甚高频(Very High Frequency, VHF)频率饱和对机场吞吐量的制约,提升终端进近服务性能、降低频率需求和运营成本已经成为终端进近发展的重要目标,而当前的仪器仪表系统(Instrument Landing System, ILS) 难以满足未来精密进近对导航性能和频谱复用的需求,这对新的进近方式在频谱效率,可靠性和成本控制等方面提出了巨大的挑战。
全球卫星定位系统(GNSS)在终端进近中的研究,最早是由Braff和Shivel在1985年提出,首次将差分全球定位系统(Differential Global Positioning System, DGPS)和GPS完好性通道(GPS Integrity Channel, GIC)的概念结合起来[3],并将广域增强系统(Wide Area Augmentation System, WAAS) 作为飞机导航精度和完好性性能提升的途径[4]。1986年,文献[5]提出了GPS的自主完好性增强的概念,利用GPS观测信息的冗余或气压计等其他信息的冗余,在机载端对误差进行监测。文献[6]提出了利用GPS伪距残差来对GPS自主完好性进行增强,并通过蒙特卡罗方法验证了通过这种方式引导进近可以获得完好性性能上的提升。文献[7-8]提出了局域增强系统(Local Area Augmentation System, LAAS)技术,该技术可以在局部区域内通过数据传输链路提供高精度的差分改正数,从而获得完好性性能的提升。此后,基于WAAS,LAAS和RAIM的进近技术得到广泛研究和应用[9-16]。
在终端进近的标准制定方面,国际民用航空组织(International Civil Aviation Organization, ICAO) 标准和建议措施(Standards and Recommended Practices, SARPS) 和航空无线电技术组织(Radio Technical Commission for Aeronautics, RTCA) 提供了相关标准和建议措施。ICAO附件10 (无线电频率导航) 提供了支持进近的GPS增强系统的国际标准。根据其规定,GNSS的增强系统包括星基增强系统(Satellite Based Augmentation System, SBAS),地基增强系统(Ground Based Augmentation System, GBAS) 和机载增强系统(Aircraft Based Augmentation System, ABAS)。其中ABAS包括两类:接收机自主完好性监测(Receiver Autonomous Integrity Monitoring, RAIM) 和飞机自主完好性监测(Aircraft Autonomous Integrity Monitoring, AAIM),前者只使用GNSS的信息,后者使用其他机载传感器(如气压高度计,时钟和惯性导航系统等)。由于本文主旨为介绍卫星导航在终端进近中技术的应用,后续章节侧重于介绍ABAS中RAIM的研究现状及应用。DO-229提供了GPS/WAAS机载设备最低可操作性能标准,DO-253提供了GPS LAAS机载设备最低可操作性能标准,DO-178,DO-254,DO-246和DO-257等文件分别提供进近中机载设备的软硬件,接口控制和电子地图中的航行信息等相关标准。截止到2018年5月,RTCA网站上公布的RTCA项目管理委员会会议报告中,对DO-253D,DO-246E,DO-257B等相应标准进行了进一步的修订,分别对支持CAT-II/III的设计标准和OEM标准等相关部分进行了更新[17]。
根据空间信号性能要求,飞机在空中航行主要包括远洋航路、本土航路、终端、非精密进近(Non-Precision Approach, NPA)、垂直引导进近(APproach operation with Vertical guidance, APV)和精密进近(Precision Approach, PA)6个不同阶段[18]。其中NPA为有方位引导,但没有垂直引导的进近,主要通过甚高频全向无线电信标,无方向性信标等地面导航台进行着陆引导。APV通过卫星或者机载设备进行导航,辅助以地面台增加精度,包含方位引导和垂直引导,但不满足建立精密进近和着陆运行要求的进近。PA为使用精确方位和垂直引导,并根据不同的运行类型规定相应最低标准的进近。不同阶段具有不同的导航性能要求,主要通过精度、完好性、连续性和可用性4类指标反映。其中,精度主要反映了系统为运载体所提供的实时位置与运载体当时的真实位置之间的重合度。完好性反映了导航系统在不能用于导航服务时及时向用户提出告警的能力。连续性是作为一个向服务空域内所有用户提供连续导航系统服务的系统,必须明确告知用户系统正常工作的持续能力。可用性是指导航系统在其服务空域内能为运载体提供可用导航服务的时间百分比,是对满足服务性能标准的时间累计效应的统计。
根据ICAO附件10,民航进近过程中所需空间信号性能要求如表1所示,其中精密进近中不同分类主要取决于不同的决断高和跑道视程[18]。

表1 ICAO对民航进近中的空间信号性能要求Table 1 Navigation performance requirements for civil aviation from ICAO
根据联邦航空管理局(Federal Aviation Administration, FAA)和交通部(Department of Transportation, DOT)拟定的GPS WAAS性能标准[19],WAAS空间信号性能需求可以分为远洋、终端、水平导航(Lateral NAVigation, LNAV)、水平和垂直导航LNAV/VNAV (Vertical Navigation, VNAV),垂直导航信标性能(Localizer Performance with Vertical guidance, LPV)和LPV-200 (200 ft以下LPV)。其标准定义如表2所示。
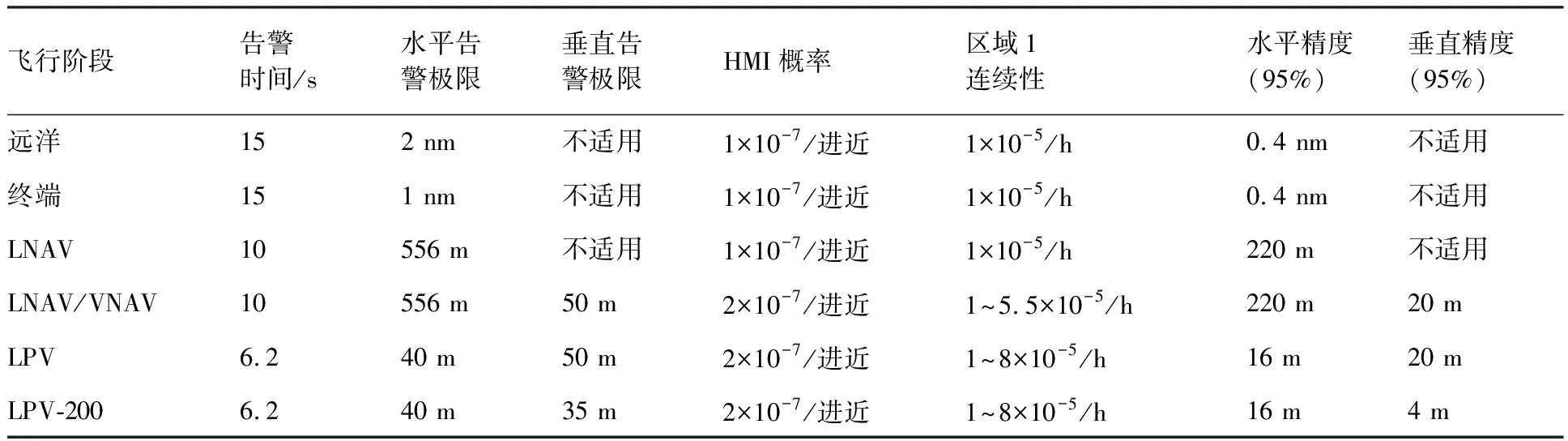
表2 WAAS空间信号性能需求Table 2 Requirements of WAAS navigation performance
卫星导航精密进近技术发展脉络如图1所示。下面从SBAS、GBAS和RAIM等3个方面对GNSS的精密进近的研究进展和实际应用进行讨论和分析。
1 SBAS
1.1 SBAS概述
SBAS的工作原理是由广泛分布的监测站对导航卫星进行监测,再通过地球同步轨道(Geostationary Earth Orbit, GEO) 卫星向用户播发SBAS导航电文,包括改正数和完好性信息等信息,用户利用播发的信息改正偏差并计算保护限值,从而实现对GNSS定位精度的改进和完好性性能的提升。其中,改正数的信息主要包括星历误差、卫星钟差及变化率和电离层延迟,完好性信息主要包括用户差分距离误差和格网电离层垂直误差。SBAS的基本架构如图2所示。
当前,国际上已经建成并提供服务的星基增强系统包括:美国的WAAS,欧洲地球同步卫星导航系统(European Geostationary Navigation Overlay Service, EGNOS),日本的多功能卫星增强系统(Multi-functional Satellite Augmentation System, MSAS)和准天顶卫星系统(Quasi-Zenith Satellite System, QZSS),印度的GPS辅助GEO增强导航系统(GPS Aided GEO Augmented Navigation, GAGAN)。计划建设的有俄罗斯的差分改正监测系统(GLONASS System for Differential Correction and Monitoring, SDCM)和韩国增强卫星系统(Korea Augmentation Satellite System, KASS)[20]。
1.2 SBAS应用现状
当前正在运行的SBAS系统中,基于WAAS的精密进近应用中,截止到2018年,全美航空系统中采用WAAS进行进近的数量大概是采用ILS的2倍,且仍在逐渐增加。截止到2018年3月,有3 898个公开的WAAS垂直引导功能信标(Localizer Performance with Vertical guidance, LPV) 服务于1 898个机场,其中包括1 897组LPVs服务于1 135个无ILS的机场[21]。EGNOS生命安全(Safety of Life, SoL) 服务从2011年3月2日开始实施,支持民用航空最低达到LPV标准。中国也正在积极推进北斗SBAS(BDSBAS)建设的相关工作,当前BDS作为第4个增强对象已得到正式确认,BDSBAS也正在积极推进国际化的进程[20]。
1.3 SBAS技术研究进展
当前的SBAS系统均是单频单系统,仅增强L1频点,由于电离层异常问题,服务性能无法达到CAT-I的性能要求。未来的发展方向是从单频单系统过渡到双频多系统(Dual Frequency Multiple Constellation, DFMC),从而满足CAT-I的性能要求[20]。SBAS性能提升主要包括3个方向:① 提升现有差分信息的改正精度;② 增加轨道改正数、分区综合改正数等信息,提升星基增强用户实时改正的精度,进而使得用户能够利用相位监测数据进行定位;③ 对播发协议中未定义的预留资源重新编排,实现新增参数的上行注入,从而用户只需升级其软件,就能实现分米级定位精度[22]。

图1 精密进近技术发展Fig.1 Development of precision approach technology
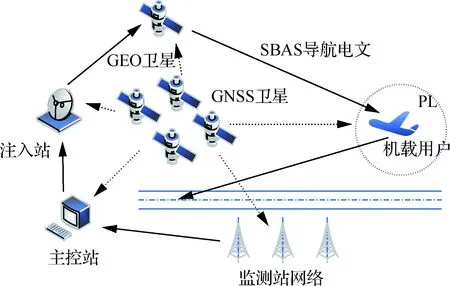
图2 SBAS基本架构Fig.2 Basic infrastructure of SBAS
SBAS的主要优点包括:① 连续覆盖的区域范围内只需要提供一组修正值。② 基于分布范围广和稳健可靠性高的SBAS监测网计算GNSS卫星星历解和抑制卫星钟差的影响,使得SBAS在其覆盖区域范围很难收到这两项异常风险的影响。③ 利用了GEO卫星来进一步增强卫星几何和提升用户的可用性。然而相应的,SBAS的局限性在于相对于GBAS,其能够提供的改正数精度上限较低,难以满足高要求的精密进近需求,更适用于远洋和终端进近。
当前的SBAS完好性研究中,研究的主要内容包括如下2个方面:监测模型优化和完好性性能评估。未来有价值的研究方向其中包括两类:一类是不同服务范围SBAS在全球范围的切换组合,另一类是新体制下的SBAS完好性增强。
1.3.1 监测模型优化
现有的SBAS完好性的研究中,监测模型优化是其主要研究内容之一。监测算法主要包括3个部分:信号畸变监测,噪声和多径监测以及时钟和星历监测。文献[23]针对WAAS中的信号畸变监测问题,综合考虑了标准的二阶阶跃参数的扩展、二阶的调幅模型和多径的单反射模型,获得了比现有的ICAO模型更优的信号畸变监测性能。文献[24]提出了一种新的双频SBAS星钟及星历误差的包络算法,这种算法考虑了接收机异常情况。文献[25]概述了双频SBAS的完好性计算模型,并且提供了缓解通讯中断、周跳和电离层异常等情况下的WAAS完好性增强方式。文献[26]提出了一种基于协方差的SBAS星钟星历误差包络方法,并对其性能进行了评估。文献[27]提出了一种基于估计和分离SBAS中的星历和星钟误差的方法,通过单差估计出星钟和星历误差,并通过Kalman滤波递推出结果。文献[28]提出了一种改进的WAAS用户位置监测算法,针对多个小误差同时产生引起的威胁,提出了解决方案,改进了保守的传统膨胀算法的保护水平。
1.3.2 完好性性能评估
很多学者也对各SBAS系统的完好性性能进行了评估。通常情况下,WAAS可以在美国境内的大部分和加拿大大部分区域及阿拉斯加地区能够提供水平优于1 m,垂直优于1.5 m的定位精度[29-30]。文献[31]分析了韩国境内单频SBAS的可用性,基线条件下70%的区域可以获得APV-I 的服务,在中国和日本增设两个基准站之后可以获得韩国区域内100%的APV-I服务覆盖。文献[32]分析了俄罗斯SDCM的发展现状和服务性能,预计全球监测站建站完毕后,可以提供水平1.5 m和高程3 m的服务精度。文献[33]则给出了EGNOS的完好性计算模型,并评估了多频多系统情况下的EGNOS完备性,双频GPS/Galileo双系统的完好性在欧洲区域绝大部分地区水平保护水平(Horizontal Protection Level,HPL) 小于5 m,少数地区5~10 m,均能够满足CAT-I的性能要求。由于SBAS系统信号的覆盖区域通常也包括邻国区域,文献[34-35]也分别评估了GAGAN和QZSS在中国境内的完备性,中国大部分区域,尤其是东部沿海地区80%时间内可以观测到QZSS卫星,其播发的L1-SAIF差分增强信息可以获得和WAAS相当的精度,LEX增强信息可以实现分米级定位,而GAGAN则在北京地区实现了24小时全覆盖,增强定位的精度水平为水平方向优于5.9 m (95%),高程方向优于7.6 m (95%)。文献[36]基于4年内的实测数据对信号质量监测进行了评估。文献[37]对近些年WAAS的可用性提升进行了进一步的分析和拓展。
1.3.3 不同服务范围SBAS在全球范围内的组合
不同服务范围SBAS在全球范围内的共有组合是未来的研究方向之一。当前,不同的SBAS卫星具有独立的服务覆盖范围。部分SBAS系统的覆盖范围有服务区域上的重叠。对于全球航空服务而言,民航飞机从一个SBAS服务区域飞出,切换到另外的SBAS服务区域中,在不降低服务标准的前提下,不同的SBAS的覆盖范围的无缝连接,对于提升航空服务的完好性具有十分重要的意义。
1.3.4 新体制下的SBAS完好性增强
通过提取出参考站的每颗卫星相位残差并建模播发给用户,可以对高精度的相位观测值加以利用,缩短相位定位收敛时间,是星基增强系统服务的一大拓展方向。文献[22]表明,通过播发相位残差给用户接收机,可以在7 min内实现精密单点定位(Precise Point Positioning, PPP) 的快速收敛,收敛之后水平坐标精度达到0.1 m,垂直方向的坐标精度达到0.2 m。SDCM在设计报告中也包括向用户增加播发伪距和载波相位观测值,在基站周围200 km内可以达到厘米级的服务精度[32,38]。基于载波相位观测值的星基增强服务是未来的发展方向,而其能够达到的完好性以及基于相位和伪距的星基增强服务组合能够达到的完好性尚需进一步分析。
2 GBAS
2.1 GBAS概述
GBAS的工作原理是通过地面参考站的形式将差分改正信息和误差信息通过甚高频数据广播(VHF Data Broadcasting, VDB) 播发给用户,从而对用户的完好性进行增强。GBAS利用了卫星轨道、卫星钟差、电离层延迟、对流层延迟等误差的空间相关性,通过位置精确已知的基准站计算误差改正数并将其播发给流动站,改正流动站的伪距观测值,进而提高定位精度。GBAS的基本架构如图3所示。
与SBAS不同,GBAS的优点在于:①由于GBAS的基站距离和流动站相对接近,在基准站一定范围内的改正精度优于SBAS,对局部大气参数变化的敏感性也高于SBAS,在基准站一定范围内能够获得优于SBAS的进近性能。② GBAS 有能够满足最严格的航空运作要求的潜力,并且相对传统的ILS而言,不需要为每条跑道单独配备设备,一套地基增强着陆引导系统(GBAS Landing System, GLS)可以满足多条跑道的进近服务,进近成本较低。并且,GBAS用单一的VHF频率服务多个跑道,使有限的导航频率谱得以充分利用,相对于ILS而言,可以进一步增加机场的吞吐量。
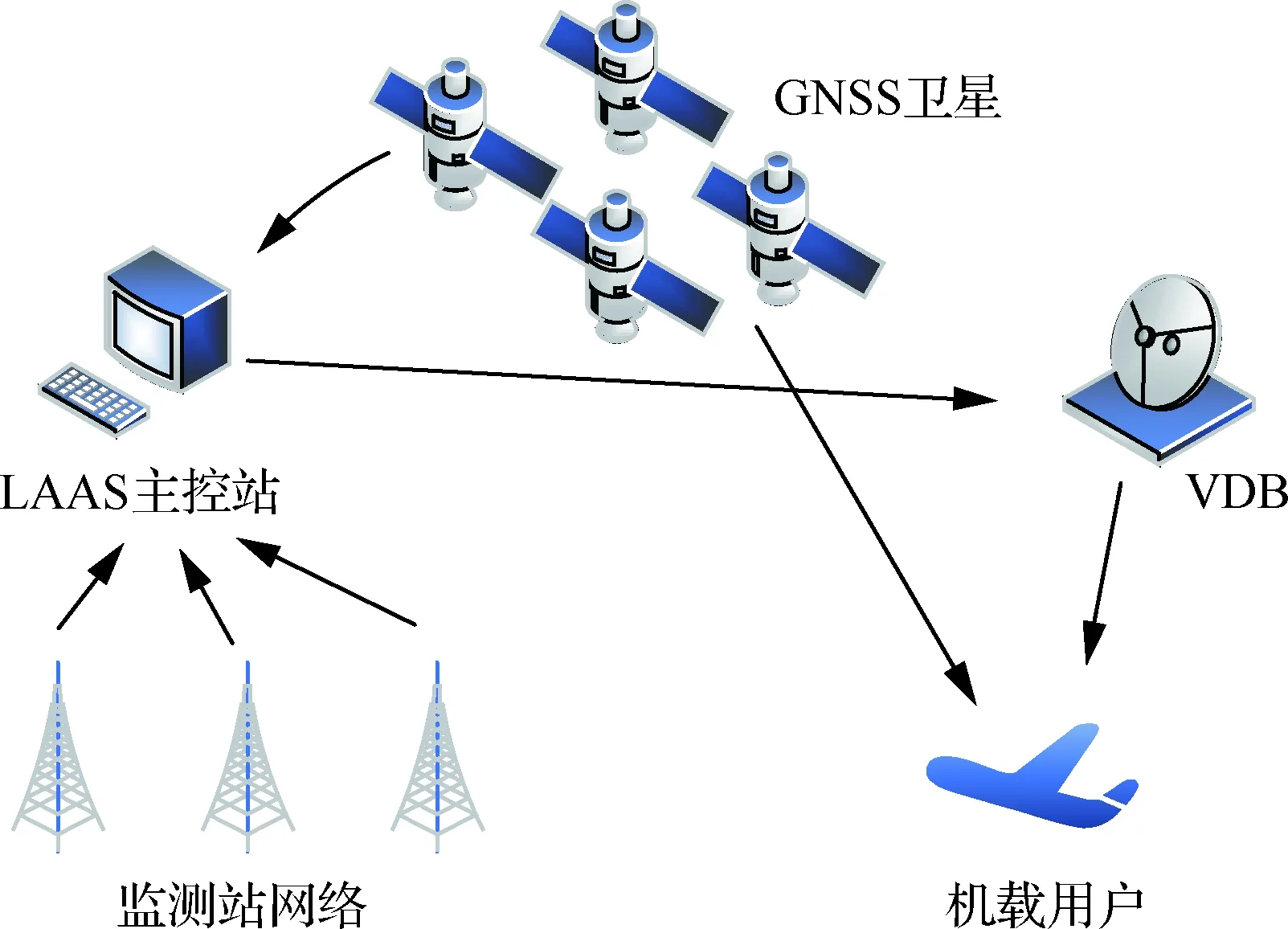
图3 GBAS基本架构Fig.3 Basic infrastructure of GBAS
2.2 GBAS应用现状
GBAS是当前精密进近方向的研究热点,也是当前精密进近的主要发展方向之一。截止到2017年3月,GBAS在美国Newark Liberty国际机场和洲际机场获得了公开运营批准,Honeywell的SLS-4000 Block II已经于2015年获得了设计许可,现正在获取满足CAT-III进近服务性能的SLS-5000的设计许可批准。GBAS现在也是大多数新型商业运输飞机的标准或可选项。欧洲104条航线中8.5%的航线通过GBAS进行进近。7%的Boeing飞机和2%的Airbus装载了GBAS,且这个数字正在逐年增加。在俄罗斯,基于GPS和GLONASS的由NPPF研发的LCCS-A-2000是机场主要的导航方式,可以提供CAT-I的精密进近服务。中国电子科技集团公司第二十研究所通过长期研究和开发,研制了基于GPS的GBAS系统样机和设备,并先后进行了多次多地的跑车和飞行试验,并于2014年在天津滨海国际机场安装[39]。
2.3 GBAS技术研究进展
当前,GBAS已经在美国、欧洲、亚洲和澳大利亚等多地的机场验证了可以满足CAT-I精密进近。现在的研究目标主要集中推进其满足CAT-II/III的精密进近,预计在2020年左右第一套系统投入使用。现今的GBAS研究中,GBAS的发展方向主要为从单频单系统扩展到多频多系统,从而进一步实现完好性性能的增强,从而满足更高的进近标准要求。
GBAS性能提升主要包括3个方向:① 提升现有差分信息的改正精度;② 利用增设的位置监视器(Position Domain Monitor, PDM),对LAAS地面设施实时生成的位置精度执行独立的检查[40];③ 将基于载波相位平滑的差分定位方式改为基于高精度载波相位测量值的差分定位[41]。
当前,GBAS的研究热点主要包括如下5个方面:GBAS监测模块和算法,电离层梯度影响,统计包络,滤波处理以及空间信号质量分析、辅助信号增强和干扰。
2.3.1 GBAS监测模块和算法
基于地基增强系统系统设计的研究由来已久。文献[42]提出了差分GPS的完好性监测系统设计的原型算法,从信号质量监测(Signal Quality Monitoring, SQM)、测量质量监测(Measurement Quality Monitoring, MQM)、数据质量监测(Data Quality Monitoring, DQM)3个方面对数据观测量进行质量约束,并通过EXM-I和EXM-II排除逻辑,保证GBAS参考站的B值通过多参考一致性监测、σ-μ监测和信息域范围监测,确保基站播发的改正数符合统计理论,具有一定的内符合性,满足给定的精度、完好性、连续性和可用性指标的要求。
SQM模块的目的是为了保障GBAS系统中GNSS系统的信号质量,进而保障向用户提供导航服务能力的技术。当卫星自身硬件设备或空间传播信号受到干扰的时候,会导致卫星信号的波形失真,用户接收机的伪码相关器的相关峰会产生偏差,造成定位精度的下降,情况严重的时候,会使得用户失去定位能力。1998年,Ndili分析了无线电频率干扰(Radio Frequency Interference, RFI)导致的卫星异常的3种实例,对比了RFI和非RFI存在情况下的宽带干扰、脉冲和非脉冲干扰,并基于此提出了一种新的GPS信号质量监测方案[43]。Phelts对异常波形进行了建模,还分析了理论上的最小可探测误差(Minimum Detectable Error, MDE),并基于此设计了针对多径的信号质量监测技术[44]。Mitelman分析了GPS精密进近中的垂直位置误差产生的原因、性质和影响,并分析了差分情况下的理论误差限值,并分析了多相关接收机在异常波形下的响应[45]。斯坦福大学的完好性监测平台(Integrity Monitor Testbed, IMT)在设计中将SQM包含为3个部分:相关峰对称性监测、接收信号强度监测和码载波偏差监测[42]。
MQM模块的主要目的是为了监测GNSS星钟异常或者地基增强系统中接收机异常导致的冲激性异常或阶跃性异常,主要表现为载波观测量或相位平滑伪距量的特征变化。其中,载波加速度-斜坡-阶跃监测(Carrier Acceleration-Ramp-Step Test, CARST)通过对载波观测值的速度、加速度进行约束监测,并基于短时间内载波观测值的变化拟合模型对当前历元的离群程度进行检验,从而达到检验当前历元载波相位观测值是否发生冲激性异常或阶跃性异常的目的。相位平滑伪距监测(Carrier-Smoothed Code Innovation Test, CSCIT)的监测量为相位平滑伪距的输出量,结合CARST的结果,可以对原始伪距是否发生冲激性异常或阶跃性异常进行监测[42]。
为了保障GNSS接收到的星历的可靠性,有必要对GNSS接收机星历质量进行监测。DQM模块的功能就是保障接收星历不出现异常。对于新观测到的卫星,以接收到的卫星历书作为参考,当解算出的位置差不超过7 000 m的时候,视为正常。另外一种针对新观测到的卫星的数据质量监测方式是通过昨天同时间活动的星历和今天同时间内获得的星历进行对比,利用卫星轨道的日周期性对星历进行约束。而对于接收超过了一组时间内的卫星,可以将收到的相邻时间的同卫星星历解算得到的卫星位置进行比较,不超过250 m 的情况下视为正常[42]。
2.3.2 电离层梯度影响
电离层误差是影响GBAS完好性性能的重要因素之一。在全球范围内,地球上不同位置的大气密度和组成以及受到的太阳辐射均不相同,导致电离层电子含量的水平分布呈现出不均匀性。低纬度区域的电离层活跃,变化剧烈,对无线电用户影响最大,存在赤道异常现象;中纬度区域电离层较为平静,季节变化,周日变化特征明显;高纬度区域(特别是极区),由于受到极昼极夜的影响,电离层季节变化,周日变化并不明显,但由于受到太阳风粒子等的影响,变化较为复杂。此外,电离层在不同区域和不同时间还存在一定的异常变化特征,如赤道异常、冬季异常、夜间异常等。电离层的此类特征给GBAS性能提升和建立全球和区域范围内的电离层异常梯度模型带来了困难。
通常情况下,单频载波电离层误差影响大概为几米到十几米。但是,电离层风暴等极端条件下会显著提升电离层误差波动,此时电离层误差达到30~50 m,严重影响定位精度,且极大的电离层梯度进而导致GBAS基准站和用户站之间电离层误差的相关性降低,进而影响GBAS的完好性[46-47]。文献[48]基于WAAS和JPL预处理的连续运行参考站数据,分析得出了电离层正常活动情况下垂直电离层梯度方差(σvig)通常在1~3 mm/km。而在电离层风暴或者异常活跃时期,极大的倾斜电离层空间梯度可以达到412 mm/km (观测于USA 2003.11.20, UT2000-2200),比常规状态高出了两个数量级[48-49]。极大的电离层梯度的影响在未改正的情况下,导致的垂直定位误差可以达到几十米。
针对于电离层梯度威胁影响对于GBAS用户的影响,通常的处理方案有:① 建立异常电离层梯度威胁模型对电离层异常梯度进行监测,找到受到卫星电离层梯度影响的卫星进行排除。② 通 过无电离层组合等方式从观测数据层面对异常电离层影响进行消除。③ 对于无法检测到的电离层梯度影响,采用卫星星座几何结构进行约束的方式对其影响进行抑制。
为了分析LAAS用户可能受到的极大电离层梯度威胁影响,基于区域范围内的长时间的历史观测数据进行LAAS电离层构建异常模型是通用的解决方案。基于CORS (Continuously Operating Reference Stations)站和WAAS (Wide Area Augmentation System)的数据,文献[50]建立了适用于美国本土境内的LAAS的电离层异常威胁模型。通过基于不同高度角范围对最大前向斜率,前向宽度,前向速度,最大差分延迟等参数进行了建模。该模型已经作为第一个被FAA批准的此类设施被用于Honeywell SLS-4000的系统设计,可在CONUS境内使用。CONUS电离层异常威胁模型基于中纬度的观测数据所建立,对于其他电离层特征不一样的区域,不能作为通用的模型。基于位于2°~18°E和45°~58°N境内的IGS站,EPN (EUREF Permanent Network), GREF (integrated German geodetic REFerence network)和SAPOS (SAtellite POSitioning service of the german state survey)的观测数据,德国建立了适用于德国境内的电离层异常威胁模型,该模型在低高度角的时候为40 mm/km (<30°),进而增加到140 mm/km(>70°)[51]。澳大利亚空间气象局也基于境内的参考站观测数据建立了适用于澳大利亚境内的电离层异常威胁模型,且当前的研究表明LAAS CAT-I CONUS电离层异常卫星模型同样适用于澳大利亚境内[52]。韩国基于2000—2004年韩国GNSS参考站网数据也建立了适用于韩国境内的电离层异常威胁模型,最大电离层梯度异常为160 mm/km,且同样在CONUS异常模型的包络范围内[53]。文献[14]基于ICAO亚太区的成员组织和区域机构的数据建立了适用于亚太区低地磁纬度的GBAS电离层梯度异常模型,观测数据中最大的电离层延迟梯度值为518 mm/km,建议采取的保守梯度上界为600 mm/km。中国在地理纬度主要位于中纬度地区,电离层异常波动相对于赤道附近的地区较为平缓。当前,针对于中国境内的电离层异常威胁模型分析目前还相对较少。
基于双频观测数据,采用无电离层组合可以将电离层梯度影响进行消除,从而抑制异常电离层梯度所带来的影响。文献[54]提出了用双频GPS数据来通过消除电离层的影响进而改进相位平滑伪距的算法。该文献首次提出了Divergence-free (Dfree) 和Iono-free (Ifree) 算法。文献[55]基于广义无偏差载波相位平滑框架,推导并分析了L1和L5载波上的无电离层组合载波相位平滑,无电离层组合输入的载波相位平滑和整周模糊度组合的载波相位平滑。文献[56]提出了一种适用于GAST-F的双频GBAS码载波偏差监测算法,通过单差、双差、三差,四差等15种误差模式进行监测,在同等漏检概率下能够监测出GAST-D方案下一半的偏差影响。这类方法仍然存在以下问题:一是无电离层组合造成了伪距和随机噪声的膨胀;而是传统的无电离层组合对于高阶电离层影响仍然不具有良好的抑制效果。
基于卫星星座几何结构进行约束的主要步骤包括:① 枚举所有条件范围的GBAS地面设施定位几何结构;② 在约束的基础上,GBAS地面设施建立所有可行的机载接收机可用卫星几何结构,③ 计算所有可用几何结果的最坏情况保护阈值,排除掉超过阈值的几何结构[50]。文献[57]提出了在电离层异常情况下的定位域几何结构约束方法。这种方法的缺点在于有些时候选出的定位子集是相对最“安全”的子集,而未必是定位精度最优的子集。
2.3.3 统计包络
在GBAS的完好性监测中,通常假定实际情况中的差分修正量误差分布满足对称性和单峰性等要求,比如服从高斯分布。实际情况中,由于受到多径效应[58-59]、卫星故障[60]和地面各参考站之间误差相关性[61]的影响,修正误差不仅包含高斯误差,有些时候甚至还包括了非零均值高斯误差和非高斯误差的影响。在误差分布上通常表现为鲜明的厚尾特征,在实际结果中如果用高斯分布进行包络,往往会造成系数的过度膨胀,在完好性指标的计算中,导致保护限值的过于保守。针对传统的高斯膨胀包络模型容易造成门限过于保守的情况,解决方案通常包括两类:一类是通过核和旁瓣分开估计进行包络;另外一类是采用其他包络模型进行整体包络。
文献[62]提出了一种高斯核高斯旁瓣(Gaussian Core Gaussian Sidelobes, GCGS) 的分布,通过分隔开中心和拖尾两个部分并且用不同的分布进行建模,可以缓解厚尾特征带来的影响,且操作简便。类似的,文献[63]提出了基于高斯核拉普拉斯尾(Gaussian Core Laplacian Tail, GCLT) 和高斯核指数尾(Gaussian Core Exponential Tail, GCET) 的包络方式,能够有效降低常规膨胀算法带来的高膨胀因子影响。文献[64]提出了一种基于整体逆高斯分布(Normal Inverse Gaussian, NIG) 的方式,通过选取合适的NIG分布族来抑制厚尾影响。混合高斯模型同样针对分布曲线两端包络不全面的问题,具有良好的抑制效果,并且能够在短时间内少量的数据中,获得快速的膨胀系数估计[65]。
在当前的阈值包络数据处理过程中,数据由于受到平滑效果的影响,平滑区间内的数据具有一定的相关性。在仿真过程中,有时候由于数据量不足和抽样方式的影响,相关性带来的影响无法避免。在很多核与旁瓣分开包络的算法中,核和旁瓣之间也具有强相关性,这种相关性在当前的研究中较少考虑到。另外一点是方差本身可能具有的统计不确定性和异方差等特性,使得实际应用中的统计数据的包络仍然存在诸多限制。
2.3.4 滤波处理
针对非模型化多路径和随机噪声影响,滤波处理是抑制其影响的有效方式。从滤波器设计的角度,滤波算法主要可以分为时域平滑,FIR滤波、小波滤波和频域滤波。时域滤波包括传统的滑动窗平均、Hatch滤波等多种方式,频域滤波包括则通过将信号从时域转换到频域,再进行滤波变换处理。文献[66]提出的Hatch滤波具有简单、方便实时处理的特点,被广泛用于相位平滑伪距中。文献[54-55]的滤波结构中运用了FIR低通滤波对非模型化误差进行平滑和削弱。文献[67]提出了一种基于短时傅里叶变换的频域滤波方法,通过自适应提取谱峰并抑制谱峰,从而达到对伪距多径进行抑制的效果。文献[68]提出了利用小波去噪处理双差中的随机噪声偏差。文献[69]则给出了一种频域滤波,通过将时域数据转换到频域再进行滤波处理,最后反变换回时域,从而达到对多径和噪声的抑制和削弱效果。
时域平滑的特点在于其滤波效果受到平滑系数的影响。相应的,FIR滤波器滤波效果同样受到滤波截止频率等滤波器参数设定的影响。小波去噪则依赖于小波基的选取。频域滤波的处理首先要将时域滤波转换为频域,实现相对复杂。因此,建立能够有效应对多种复杂环境和情况,自适应选取最优参数的滤波方式更具有应用上的实际意义。
2.3.5 空间信号质量分析、辅助信号增强和干扰
除此之外,GBAS的研究方向还包括空间信号质量分析、辅助信息增强策略和干扰影响。文献[70-71]基于大量实测数据,对多系统的空间信号质量进行了系统的评估,并考虑了电离层方差影响的包络问题。文献[15]对北斗空间信号误差的长周期特性和统计特征进行了监测。
基于GBAS的精密进近中,辅助增强策略主要包括机载气压高度计和Doppler信息等。文献[72]研究了气压高度计的测高值对GPS进近系统进行增强的策略。文献[73]则研究了电离层闪烁情况下,利用Doppler信息辅助GNSS弱信号跟踪的方法。
从干扰来源的角度,干扰分为被动干扰和主动干扰。文献[74]则通过对Newark,New Jersey机场的GBAS站观测数据和Leesburg的WAAS站观测数据进行分析,得出了个人隐私设备(Personal Privacy Devices,PPD) 可能会对几百米外的GNSS设备产生干扰,进而影响精密进近完好性的结论。
3 RAIM
3.1 RAIM概述
基于的GBAS和SBAS的完好性监测算法需要从GEO卫星端或者VDB端接收信息并处理,一则成本代价相对较高,而是在告警时间上有额外负担,对于高完好性和有限告警时间要求的情况下,具有一定的限制。依靠RAIM可以在接收机端实现快速的卫星故障识别和排除。RAIM是利用用户端接收机内部的冗余度信息,或者借助飞机上其他的辅助设备(气压高度表,惯导、伪卫星等)[75-76],实现卫星故障检测和故障识别的技术。RAIM的主要功能包括:检测卫星是否存在故障,辨别故障的卫星并排除。RAIM虽然难以满足较高的完好性标准,但是对卫星故障反应迅速、对外界干预的依赖度较低,成本相对较低,且能够对本地故障能够快速反应和告警。
3.2 RAIM技术研究进展
RAIM在现阶段不适用于独立进近着陆,通常作为机载接收机的必备功能辅助增强完好性。RAIM的主要研究内容包括两大类:一类是故障识别和探测方法,主要是对故障进行有效探测和排除;另外一类则是RAIM的完好性判定方法,主要包括当前历元定位系统的完好性风险的超限判断。当前,RAIM的前沿方向主要包括两类:一是ARAIM (Advance RAIM, ARAIM),目的是利用多星座和多频信号的优势,尽可能少依赖地面监测系统的前提下,提升系统完好性;二是基于载波的接收机自主完好性监测方法(Carrier-phase RAIM, CRAIM),在飞机进场着陆和CAT-II/III类舰载飞机着陆等高精度场合都有着广泛的需求应用[77]。
3.2.1 连续性和离散型RAIM
从数据特征的角度,RAIM可以分为基于连续性的RAIM算法和基于离散型的RAIM算法。
基于连续型的RAIM算法包括伪距比较法、最小二乘残差法和奇偶空间法[5-6,78]等。在伪距比较法中,假设至少观测到5颗卫星,随机抽取其中4颗确定出用户位置,用该位置预报剩余那颗星的伪距观测值,将预报值和真实的伪距观测值之差作为探测系统是否出现异常的基本观测量[79]。奇偶矢量法思路为基于均值漂移模型,构造奇偶矢量进而构造检验统计量,这种方式计算简单、物理意义直观,被RTCA推荐为基本算法[6]。最小二乘残差法根据GNSS观测方差计算出最小二乘解,得到伪距残差构造检验统计量[65]。这3种方式已经被证明是等价的[79-80]。
基于离散型模型的RAIM主要为Kalman滤波法[81]。文献[82]提出了一种基于Kalman滤波的RAIM方法,可以用于动态模型,主要基于Baarda异常探测和识别模型。文献[83]提出了一种基于扩展Kalman滤波(Extended Kalman Filter, EKF) 的GNSS接收机自主完好性监测方法,在阶跃性误差和斜坡误差的基础上,提出了界定EKF平均位置误差的方法,并用于估计EKF的保护水平。文献[84]在文献[83]的基础上,利用正交分解得到标量计算方程,在获得高估计精度的Kalman滤波误差的同时,降低了常规方式迭代求解和求逆的计算量。Kalman滤波法主要基于历史观测量进行参数估计和递推计算,对先验信息的依赖性较强,对于即时的误差变化很难准确预测和及时反映。
3.2.2 RAIM故障识别方法
RAIM方法检测出系统存在故障卫星后,识别出故障卫星并将其剔除的方法包括子集比较法、奇偶矢量法和最大似然估计法[80]。判断RAIM是否可用的方法包括:近似径向误差保护法(Approximate Radial Protected, ARP),最大精度因子法以及水平定位误差保护限值(Horizontal Protected Level, HPL) 法[79,85-86]。ARP方法定义卫星引起的水平误差和距离残差之比为该卫星斜率,斜率最大的卫星发生故障的时候最容易漏检,对应的近似误差保护限值超过限值则判定为RAIM不可用。最大精度因子方法通过剔除卫星之后的精度因子变化情况对RAIM进行可用性判定。HPL方法通过将HPL与不同航段的HPL进行比较,来判断RAIM的可用性。
3.2.3 多源信息辅助RAIM
RAIM传统的方式主要是基于GNSS观测量的冗余信息,来实现卫星故障的识别和剔除,而冗余信息同时也包括其他信息来源,比如惯性导航系统(Inertial Navigation System, INS)、伪卫星和钟差等。
文献[87]研究了基于预测残差的Kalman滤波在GPS/INS组合导航中的完好性监测方法。文献[81]分析了GPS/INS组合导航系统中的RAIM算法,基于Gauss-Markov模型和Kalman滤波,给出了动态模型下的GNSS RAIM监测方式。文献[88]提出了一种在GNSS/INS组合导航中的自主完好性监测算法,基于紧组合估计的Kalman滤波等价最小二乘方程,通过W检验对卫星导航系统的观测信息进行误差探测和剔除,结果表明高精度的INS能够进一步提升系统的可靠性和故障区分能力,尤其是在大机动情况下保障系统的稳定度。文献[89]将伪卫星作为信息补充,提出了一种基于加权奇偶矢量的伪卫星辅助北斗定位完好性监测算法。文献[90]基于钟差的历史数据,建立钟差的二次多项式模型,并基于此来判断钟差是否越界发生异常,降低了可用性的要求。
3.2.4 ARAIM
ARAIM是美国GNSS演化架构小组(GNSS Evolutionary Architecture Study, GEAS) 设计的一种用户端完好性监测架构,利用多频和多星座的优势,在降低对地面监测依赖的前提下,提供全球覆盖的LPV-200服务的能力,也是先进RAIM发展的热点方向之一。

3.2.5 基于稳健估计的RAIM
接收机自主完好性监测中,处理异常值的传统方式主要是基于统计检验,超出临界值则判定为异常。但是统计检验本身也是估计值的函数,在粗差的影响下会产生偏差。另外一个缺点是一旦观测值被标记为异常,通常的处理方式是将其从观测值中剔除,可能会损失其中的有用信息。为了有效抵抗异常观测值带来的影响,可以采用稳健估计方法来进行抗差处理。
文献[101]讨论了M估计在GNSS接收机自主完好性监测中的应用和影响,设计了基于M估计的RAIM粗差探测和剔除算法,并设计了水平保护水平和垂直保护水平的计算方式。文献[102] 中基于S估计的估计初值,根据可用卫星数实时调整参数,从而达到同时抑制多个粗差的效果。文献[82]中提出了一种基于稳健估计的自主完好性检测算法,通过引入M估计,利用稳健的等效加权矩阵进行控制,通过实测数据验证了其对多误差探测和排除的效果。
3.2.6 多频多系统RAIM
双频和三频组合可以有效抑制电离层带来的影响,在电离层活跃的时候,相较于单频系统,能够获得更高的导航性能,并且能够应对更复杂的环境。
文献[103]研究了双频组合和三频组合的GPS RAIM误差探测方法,并对比了双频和三频相对于单频GPS RAIM的增强。文献[104]对GPS/BDS兼容接收机双频RAIM算法进行了研究,得出了由于双频点同时出现的伪距偏差降低了奇偶空间矩阵传递测距误差敏感性,双频RAIM故障识别性能优于单频RAIM,由于优化了星座构型,组合双频RAIM故障识别性能优于单系统双频RAIM。文献[105]分析了同一颗卫星的多频信号在产生和传输过程中的相关性,提出了一种可以应用于三频GNSS接收机RAIM算法,可以有效提高传统单频RAIM算法的故障检测率和隔离率。
多系统组合带来影响之一是卫星数目的增加。随着卫星数目的增加,卫星几何构型得到了优化,但是随之而来的是,卫星的多故障问题需要进一步考虑。
针对多星故障问题,文献[106]最早提出了一种针对同时出现两颗卫星故障的处理方法,然而,这种方法并没有对单卫星误差和同时两颗卫星误差发生的概率加以区分。文献[107]提出了一种最优加权平均解(Optimal Weighted Average Solution, OWAS) 算法,通过GPS/Galileo两个星座的定位结果在位置域加权,提高了算法的可用性。文献[108]在OWAS的基础上,考虑了卫星故障可能来自于同星座的可能性,提出了一种改进的OWAS算法,通过分为3组并迭代选择最优加权因子对组进行加权,极大化可用性,算法表明可以满足99%的可用性支持APV-II飞行阶段。NIORAIM算法针对两个故障同时出现的问题情况,评估了最佳权重集合,通过使用测量值的不均匀加权,对测量的精度与完好性获得了较好的平衡[109]。文献[110]比较了单颗卫星和两颗卫星故障的差异,并讨论了特征坡斜率的计算问题,最后给出了垂直和水平方向的理论计算结果,并比较了双星故障的特征斜率和单星故障的特征斜率。基于几何分组的二分法(DT-RAIM)通过将所有可见卫星分为两部分,可以用于快速同时检测和识别两颗故障卫星,这种DT-RAIM对于识别单个故障卫星的性能几乎等于经典快照RAIM,而对于双故障,DT-RAIM误检率较低[111]。RANCO方法考虑具有正交性特征并符合给定几何条件的4颗卫星子集作为基础子集,并将纳入最多内点的子集作为识别异常值的集合[112]。约束GLR方法由Nikiforov首次提出,通过直接分析每颗卫星信道对定位精度的影响,旨在检测/排除导致定位失败的故障。这种方式不仅对非显著的附加伪距偏差、多卫星信号异常探测有较为显著的效果,同时也对导致定位异常的偏差很敏感[113]。
4 GNSS进近发展趋势
4.1 精度提升
当前的精密进近应用中,民用航空进近采用的定位方式主要基于DGPS,军事应用中的陆基和海基联合精密进近与着陆系统(Joint Precision Approach and Landing System, JPALS)中采用的定位方式主要基于载波相位差分技术(Real-Time Kinematic, RTK)。前者利用了基准站和流动站之间对流层、电离层等误差的空间相关性,通过差分方式进行消除,提升定位精度。后者则主要利用站星双差消除了大部分共有性误差,再利用了高精度的载波相位观测量,通过模糊度固定之后,使得定位精度达到厘米级。
从定位精度的角度上,DGPS测量值对精度的约束主要包括两种:① 部分误差的空间相关性随着距离增加而降低,进而导致了差异;② 伪距中非模型化误差比如随机误差和多路径导致的差异影响。因此,分离出空间相关性误差差异的主要来源,通过建立模型进行更精确的改正,是改进空间相关性差异的主要手段之一。中长基线情况下,对于高程差导致的基准站和机载接收机之间的差异,可以通过模型改正抑制这部分差异带来的影响。由于电离层风暴的影响,中短基线上的电离层梯度差异导致了基准站和观测站的电离层偏差的空间相关性显著降低。这部分的影响可以通过双频无电离层组合进行抑制,但同时需要考虑组合带来的噪声系数放大的影响。
而针对于非模型化误差的影响,由于多径严重依赖于观测环境、设备等因素,实际情况难以精确建模,是制约DGPS伪距定位精度的因素之一。实际应用中,硬件抑制多径的方法可以分为从天线和接收机的角度,分别采用抑径天线、接收机采用多径消除技术和多径估计锁相环等方式,抑制多径给定位带来的影响。从软件角度,可以采用基于高度角或者载噪比的方式,排除掉多径影响较大的观测量,抑制多径误差的影响;或者采用基于滤波器的方式,对多径成分的干扰特征进行分析和研究,滤除其影响,进而改善定位精度。建立更精确的误差模型,改善多径影响对于提升基于DGPS的精密进近技术的精度具有十分重要的意义。针对于噪声影响,尤其是在基于多频多系统的精密进近中,分离出特定误差以防止噪声过量膨胀放大,选用合适的滤波方式,对于提升精度具有十分重要的实际意义。
站星双差之后,RTK中的共有性误差影响基本已经完全消除,又加上采用了测量精度更高的载波相位观测值,虽然中长基线带来的误差相关性降低也会对RTK的定位精度产生一定的影响,但是RTK理论上的精度能够充分满足CAT-III类进近的精度要求。双频和三频观测量的组合可以组成一系列具有长波长的宽巷和超宽巷组合,在短基线情况下实现模糊度的快速固定。实际应用中,基于RTK的精密进近方式的问题主要局限于单历元RTK模糊度的快速固定技术和固定成功率,以及高速运动情况下RTK定位稳定性。
4.2 完好性监测性能提升
完好性约束的来源可以分为2类:一类是系统内约束,一类是系统外约束。系统内约束的方式主要包括完好性各模块监测量统计上的内符合性建立的约束,部分模块监测量利用的结合时间变化模型建立的约束和定位采用的各伪距观测量作为冗余信息的一致性约束。当前,基于测量域对各模块、各项特征进行约束的监测方式已经有不少研究,但是主要的监测方式仍然是将总体的误差概率分配到各个模块,再从各个模块进行特征监测。这种误差监测方式相对松散,实现容易,各个模块监测独立,但是忽略了各监测模块之间的相关性,容易造成定位域监测的过度保守。当前,从定位域角度利用时间信息和空间信息作为约束信息的整体监测方式仍然较少,尚值得进一步拓展。
系统外约束则考虑了利用其他仪器或者系统的观测量作为约束信息,可选的约束信息包括机载气压高度计对高程的约束、INS对飞机运动特征和位置的约束、SBAS和GBAS之间的约束等对相关特征的约束、角度约束以及其他接收机的测量量和定位约束等。系统外约束可以给出其他形式的冗余信息,为完好性监测提供另外一种尺度上的参考信息,也是提升进近系统完好性的发展方向之一。采用系统外信息进行约束的同时,不但需要考虑这些信息和GNSS相关信息之间一致性,同时也需要考虑系统外信息的准确性和稳定性。
当前对于完好性特征的包络和保护限值计算中,虽然对监测量建模的方式包含多种,但是对于大部分监测量主要采用的方式仍然是将非高斯模型采用高斯模型包络来进行特征计算和分析。从各模块角度选取最优噪声模型进行阈值计算、整体概率分配,不同接收机之间的噪声特征差异分析,最终完好性性能综合分析的论文当前仍然较少,值得进一步深入探讨。
多频可以为完好性监测和保障提供了更多的观测量。双频观测量组合能够有效地抑制由于基准站和流动站的电离层差异带来的影响,三频观测量则为组合提供了更多的组合可能。多频在DGPS系统中能够有效辅助探测电离层梯度异常,根据不同的模式选择相应的平滑算法,可以进一步增强系统的完备性。多频还能够有效地增强周跳探测,降低周跳带来的风险。多模组合可以显著增加卫星的数量,在定位中改善星座构型,提升系统定位的精度,并降低由于星座构型较差而导致的保护水平上升进而导致系统的连续性和可用性的降低的影响。多频多星座组合是GNSS精密进近的发展方向和趋势。但是在精密进近中,也带来了一些新的问题。多频多星座给卫星定位引入了系统间偏差、频间偏差、频内偏差等一系列偏差,分析这些误差在SBAS和GBAS中可能导致的影响,并相应调整处理方式,降低误差给定位和完好性监测带来的影响,也是实际应用中需要注意的地方。
4.3 星座筛选
传统的单系统下,随着星座的运行,有些区域可观测的GNSS卫星密度不足,或者由于信号干扰或遮挡等原因,影响了定位系统的可用性。多系统组合的到来,使得传统单系统中由于GNSS星座结构不合理导致的低可用性进一步降低,增强了定位的精度和完好性监测的可用性,我们面临的问题也从传统的卫星不足转为卫星的筛选。
选取GNSS的定位子集的方法有很多种。最简单的方式是通过截止高度角,当高度角低于某个特定点,将其剔除出定位集,这种方式也是通常采用的方式。高度角排序法将接收机的观测量按照卫星高度角进行排序,选取其中最高的k个,这种方式具有很好的跟踪稳健性,但是达不到最佳可用性。遍历搜索可以获得最优子集但是计算效率非常低,在工程应用中随着卫星数目的增加,难以满足告警时间需求,实用价值低。
当前基于DOP (Dilution of Precision, DOP) 性能的多星座选星方法已经有一些研究[114-120]。随着2018年全球卫星导航系统的进一步完善,卫星数量进一步增加,针对不同类型、不同系统、不同观测质量的多卫星系统的选星算法具有一定的研究价值。从完好性的角度出发,找出保护级最小的定位子集,对于完好性性能角度的提升具有实用的价值[121]。随着卫星数目的增加,矩阵求逆的运算复杂度进一步上升,筛选出合适的定位子集能够有效的降低计算复杂度,并提升系统性能,在完好性监测和告警中对完好性精度和告警时间也具有重要的意义。当前的选星算法中大多数基于GDOP (Geometric Dilution of Precision, GDOP) 和定位精度,侧重于从完好性角度的选星算法仍然较少,值得进一步深入研究和探讨[107]。
4.4 进近的普适性
终端进近关乎机载人员的生命安全,具有极高的安全性能要求。实际情况中,电离层活跃和射频干扰等因素对精密进近的性能仍然具有较高的制约性。在中纬度地区,电离层相对稳定,在极地和赤道附近,电离层的活跃性较高,不同地区的电离层特征分析、梯度监测、模型选择与切换、参数选取、SBAS和GBAS的误差改正模型的协方差包络都将随之而变化,尚需要进一步进行研究和分析。前述论文研究表明,手持设备对GNSS信号具有一定的干扰性。针对主动干扰和被动干扰等情况,提升设备的软硬件可靠性,建立在不同的环境下可靠而稳健且能够因地制宜满足所需性能要求的进近系统,也是终端进近的发展方向之一。
4.5 基于兼容和互操作的GNSS进近
兼容与互操作的概念最早由2014年美国的定位、导航与授时国家政策提出,其定义为:兼容是单独或者联合使用美国空基定位、导航以及授时系统和国外对应系统提供的服务时,不互相干扰各自的服务或信号,并且没有恶意导致导航冲突;互操作是联合使用美国民用空基定位、导航和授时系统以及国外相应系统提供的服务,从而在用户层面提供较好的性能服务,而不是依靠单一系统的服务或者信号来获得服务。
GNSS的兼容与互操作有助于降低GNSS应用的成本、提升GNSS性能,增强GNSS系统间的兼容性与互操作性也是未来GNSS的重要发展趋势,而多频多星座(Multiple Frequency Multiple Constellation, MFMC) 也是完好性发展的方向。分析不同系统间的信号的相关干扰问题,基于互操作性前提下降低GNSS终端设备的软硬件成本、进一步提升GNSS定位性能,增强精密进近服务的性能,对于精密进近的工程应用具有重要的意义。
4.6 GNSS进近的政策性推动
民航业作为中国国民经济发展的战略性产业,将迎来广阔的发展空间。十三五规划指出,十三五期间将续建机场30个,新建机场44个,改扩建机场139个,迁建机场19个,在十三五末期完善东北、华北、西北、中南、华东、西南六大机场群,新增布局一批运输机场,运输机场总数达到260个左右。
终端进近技术作为保障民航安全运营的重要组成部分,随着航空运输业的繁荣发展将迎来广阔的发展空间。基于GNSS的终端进近技术与传统的进近技术相比,对于增进进近服务的性能、降低运营成本、保障飞行流量较大和高峰时段拥堵机场的空管能力具有十分重要的价值和意义。当前,发达国家应用的主要进近技术中,基于SBAS的进近技术占据着重要的一席之地,基于GBAS的精密进近技术正受到广泛的发展,RAIM也作为机载接收机独立监测技术为机载保障提供了重要的参考和意义。成熟的GNSS进近技术作为保障民航安全的关键环节之一,可以通过科学手段降低人为失误影响,提供预警,控制进近风险,具有广泛的需求和应用空间,推进产学研相结合,推动实用价值技术落地应用能够促进相关领域技术发展,从而给民航运营带来显著的经济价值和安全保障。
随着民航和进近相关产业的发展,技术、产品、专利和市场均需并重发展。面对发达国家企业在核心技术领域的全球专利布局现状,专利不仅是企业的无形资产,同时也是服务于战略目的的竞争和合作的工具,对于相应企业的发展具有重大意义。从提升专利质量,在关键核心技术专利形成布局,促进专利转化,实现社会经济效益角度,整合对应产业链,提升相关领域企业国际竞争力提供保障,树立专利保护意识和维权意识等多个角度进行推动和布局,对中国民航相应领域的顺利发展具有十分重要的意义。
4.7 立法保护
根据《国务院关于促进民航业发展的若干意见》,意见从政策措施方面提出加强航空安全、空间交通、适航审定、通用航空等方面的立法工作,建立比较完善的民航法规和标准体系[122]。这方面在当前仍存在不足,亟需进一步完善。中国虽然在航空航天的技术领域取得了一定的成果,但现在暂未形成完善成熟的航空航天知识产权的法律保护体系。在实施创新驱动发展战略、建设知识产权强国的新时代下,倡导创新文化,强化知识产权构造,保护和运用对于保护相关领域技术健康发展并推动产业建设,具有十分重要的现实意义。
5 北斗在民航进近中的应用、发展与挑战
北斗的部署包括两个阶段:区域化和全球化。截止到2012年底,14颗BDS卫星(5GEO+5IGSO+4MEO)在轨,初步实现了亚太区域服务覆盖,2015年3月30日,新一代BDS卫星发射,标志着中国BDS系统从区域化向全球化的扩展。我国现已全面启动北斗系统第三步建设,即北斗三号系统,计划到2020年完成30颗卫星的发射组网任务,实现全球组网目标;计划到2035年,完成下一代北斗系统星座组网,建成时空信息服务的备份增强系统,部署多源融合高可信的定位导航和授时(Positioning, Navigation, and Timing, PNT)终端,完成国家综合PNT体系建设,提供体系化的PNT服务。北斗的全球组网也昭示着民航进近领域将迎来更多的机遇和挑战。
北斗作为全球第一个拥有三轨混合星座和三频完整服务能力的卫星导航系统,不仅能够带来较为经济的导航星座构型方案,并且增强了卫星导航服务在复杂电磁环境环境下的鲁棒性和健壮性,在高精度实时测量领域具有突出的优势。作为全球第一个基本导航与星基增强一体化设计的系统,北斗GEO卫星在基本导航信号中同时播发差分与完好性广域增强信息,GEO卫星空间信号既是基本导航信号又是星基增强信号,同时兼具良好的测距性能和完整的差分增强能力,对北斗重点服务区提供了更多的测距可用卫星数和更高的服务可用性。北斗的这些差异化特性,有效的增强了其在实时测量和导航应用领域的优势,给民航终端进近的推进和发展带来了更多可能和挑战[123]。
2017年8月,民航局发布了《民航局关于推进国产民航空管产业走出去的指导意见》,意见中特别提及重点考虑将雷达、空管自动化系统等成熟、优质装备,以及北斗卫星导航系统相关产品等自主创新技术作为推进空管技术产业国际化的切入点,集中优势,重点突破。这意味着北斗卫星导航系统在民航领域的应用步伐将进一步加快,也为民航领域在加快北斗产业化进程,推动产业链的发展和完善提供了契机。
适航性是保证飞机安全飞行的必备品质,也是飞机制造业工程发展的主要节点之一。中国航空总局对运输类飞机的适航标准做了明确的规定,高标准精密进近的批准必须验证飞机满足适航性标准,达到性能、完好性、有效性的要求,投入使用后仍要满足相关持续性适航要求,确保飞机持续处于安全稳定的状态。十三五规划提出了要全面实施适航攻关,提升型号审定能力。2017年10月10-14日,中国自主研发的北斗卫星导航系统首次在ARJ21-700飞机 103 架机上进行了测试试飞,试验按照相关国际民航标准及中国民航有关技术标准要求,完成了机载北斗卫星导航接收机功能和性能试飞验证,基于北斗的地基增强系统实现CAT-I的性能试飞验证,以及北斗短报文功能试飞验证。测试结果表明国产相关系统的性能达到国外同类系统水平,其中瞬态和快速定位指标居国际领先地位。2018年也是国产大飞机C919适航取证的关键一年,C919将在阎良和东营进行适航取证试验飞行。进近系统适航性要求是适航性要求中的重要组成部分之一,有助于为加强适航审定和航空器运行评审能力建设、健全适航审定组织体系提供有力支撑。推进GNSS终端进近在大飞机适航取证方面对中国自主知识产权大飞机迈向世界,服务于大飞机战略具有十分重要的价值和意义。
6 结 论
随着民用航空的迅速发展,飞机进近服务的安全性保障问题尤为凸显,对飞机终端进近提供稳定、可靠、具有高完好性性能的服务是飞行安全技术保障的研究热点之一。
GNSS增强系统通过提供全天候无间断的卫星导航信号,可以对飞机终端进近提供低成本、高完好性的服务。针对不同GNSS增强系统的特点、发展和应用方向,结合多频多系统组合的发展趋势,进一步分析不同环境下各GNSS增强系统的各类误差模型特点,建立能够满足高性能要求的完好性监测和进近服务系统,进而提升航空安全保障,是非常有意义的研究方向。
猜你喜欢
导航定位学报(2022年2期)2022-04-11
今日农业(2021年17期)2021-11-26
速读·下旬(2021年11期)2021-10-12
大东方(2019年12期)2019-10-20
智富时代(2018年5期)2018-07-18
智富时代(2018年5期)2018-07-18
科学与财富(2017年22期)2017-09-10
商情(2017年1期)2017-03-22
卷宗(2017年1期)2017-03-17
太空探索(2016年6期)2016-07-10
