
基于曲线跟踪法的模糊增量型PI控制器设计及应用
2019-03-28 03:38沈国良季寿宏杨雪峰
天然气技术与经济 2019年1期
沈国良 季寿宏 谭 汉 邵 迪 杨雪峰
(1.浙江浙能天然气运行有限公司,浙江 杭州 310052;2.浙江浙能技术研究院有限公司,浙江 杭州 310000;3.中国石油新疆油田公司重油开发公司,新疆 克拉玛依 834000)
0 引言
天然气站场控制系统中,针对压力和流量的控制一般以传统的PID控制器为主,相关的改进型控制也主要根据经验或者理论方法对控制系统进行更改,缺乏实际应用案例。为此,以浙江省天然气管网所属的站场作为研究对象,在总结多种目前针对气体系统的调节控制方法的基础上进行系统设计[1-6],经过多次测试,开发了一种基于冗余设置的调节支路联动串联控制方法,该方法以传统的PI控制器为主体,通过跟踪调节过程的特征量变化分区分段进行控制参数优化,试图达到稳定控制的目的。
1 调节功能设计
浙江省天然气管网所属的徐村湾站采用施耐德Premium系列TSX P57 3634M型控制器进行场站压力和流量控制,程序下载后扫描周期为25 ms;工艺区设置有两级调节系统,其中上游为两路DN100电动调节阀(PV136401和PV136402),下游为两路自力式调节阀(PCV136501和PCV136502),相互间距不足10 m,见图1。自2013年投产后,主调的PV阀一直处于手动或半自动控制状态。
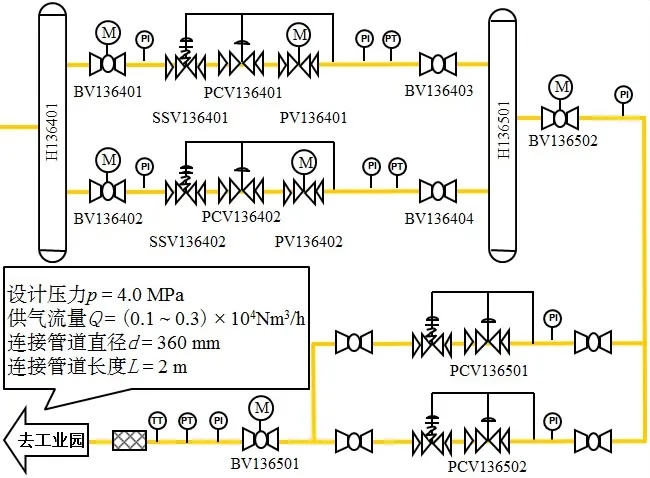
图1 徐村湾站工艺流程图
在调节功能设计时,采用增量型PI,通过调节设备特性和模糊算法来进行参数修正。
1.1 调节设备特性
对调节阀的跟随速度和流通量进行测试,测试结果见表1和表2。表中OP为阀门百分比开度,CV为百分比流量。
对表1和表2的测试结果进行分析,为避免系统耦合[7-8],且考虑到电动调节阀(PV)的调节速度小于自力式调节阀(PCV),所以需要限定阀位增量每秒不超过2.65%,并通过降低PV的控制速度使系统趋于稳定以保证调节曲线收敛;另外,对调节特性曲线进行拟合,求一阶导数后,将其引入参数的二次修正计算,进行下一阶段的分段优化。
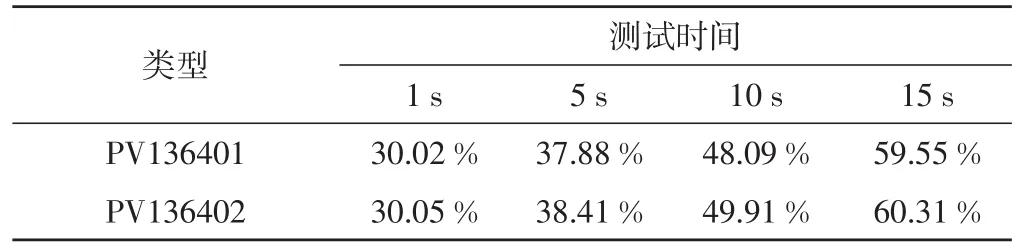
表1 调节开度百分比表
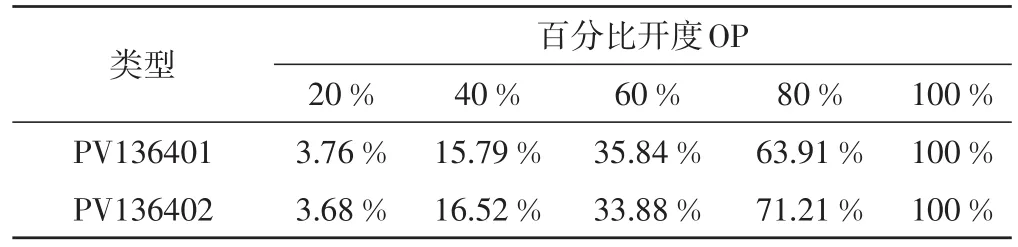
表2 流量百分比CV表
1.2 控制算法设计
采用基本的模糊算法进行设计[9-11],在此基础上根据实际情况将误差ER和误差变化EC分别划分为正大(PB)、正中(PM)、正小(PS)、零(ZO)、负小(NS)、负中(NM)、负大(NB)7个模糊集,统一采用三角分布作为隶属度函数,见图2。

图2 论域-隶属度函数划分图
而在对PI曲线的实际追踪过程中,在保证调节曲线收敛的情况下进行控制规则的设计,以正向调节为例(误差为正),误差先后经历正大到负大、负大到正小、正小到零直至趋近稳定的几个区域,而相应误差变化则先后经历负大到零到正大、再到负中至零至正小,最后为零并趋近稳定的几个区域,而反向调节则区间不变,正负相反,以此设立模糊规则表(表3)。
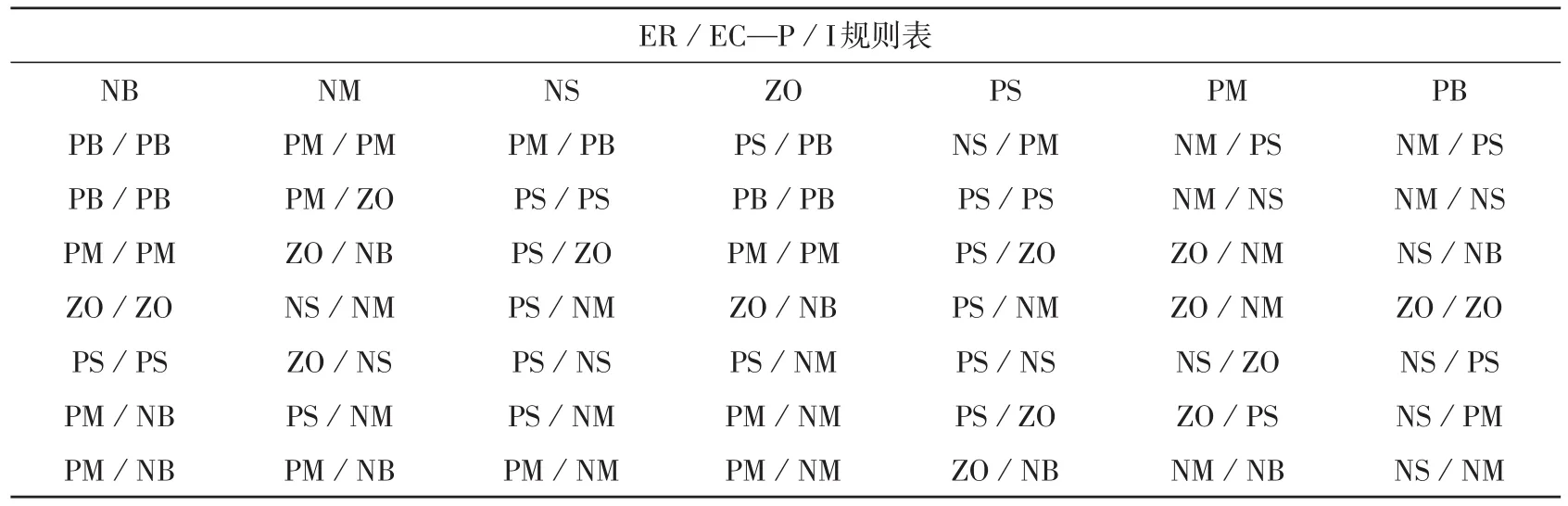
表3 模糊规则样表
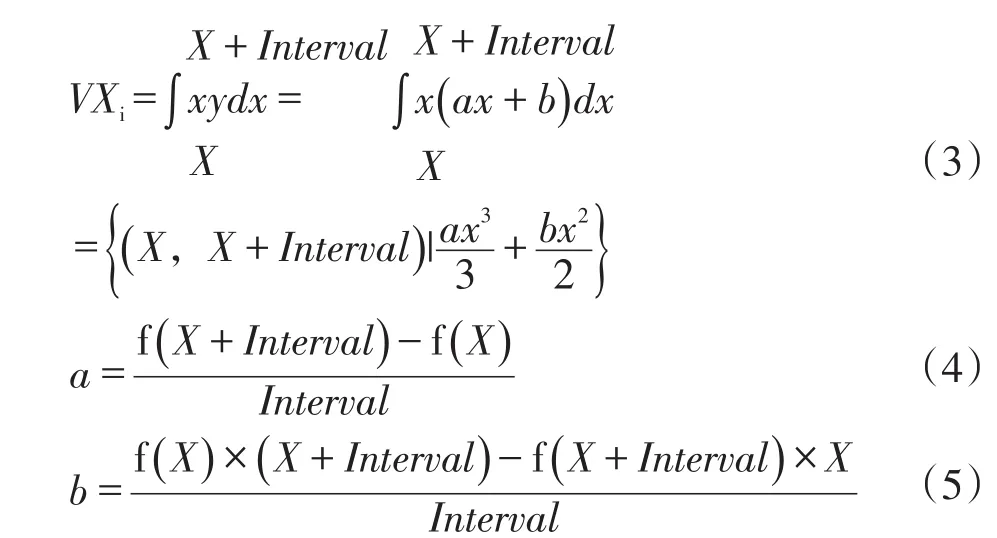
在去模糊化的过程中,采用重心法实时计算PI参数的修正值对应在论域上的坐标,考虑PLC控制器计算的周期性,将各隶属度函数围成的面积组合后,在论域坐标上以间隔Interval离散化并采用近似法计算,最后转化成一次修正值和。

其中:
最后将阀门特性函数引入权重系数W的计算[12],一方面将传统模糊算法静态的权重系数动态化,另一方面对阀门特性函数进行修正以减少阀门特性的非等百分比影响,以获得更好的控制效果:

通过式(6)和式(7)对PI的参数基数和分别进行修正,得到最终参数:

式(2)至(4)中,x、y分别为图2中隶属度坐标系中的坐标轴;f(x)为同一x坐标下隶属度值最大的隶属度函数;n为将f(x)离散化后的分段数量,Interval对应每个函数段在x轴上的跨度,X对应每个函数段在x轴上的起始分段坐标值;Vi为f(x)的第i个分段与x=X、函数x=X+Interval以及x轴围成的图形面积;VXi为Vi对x坐标的积分,即相关f(x)函数段在x轴上的重积分;Gx为f(x)与x轴围成的整个图形的重心G在x轴上的坐标。
2 支路冗余控制功能设计
在支路冗余控制方面,采用增量型PI控制,即针对多个调节支路,仅设置一个调节控制器,通过不同支路的调节阀进行串联设置的方式来实现联动控制。同时为避免单一支路瞬间负荷过大,每个调节阀划分为0~30%、30%~60%、60%~100%3个调节阶段,且始终保证两条支路处于相邻或相同的调节阶段,以降低支路切换过程中的扰动,并结合控制算法来降低调节过程中的超调量。
3 实际应用测试
将系统投入原站场后,从抗耦合能力、调节适应性、支路切换补偿时的抗扰动性3个实际需求方向进行应用和分析。
3.1 系统的解耦功能
实验测试结果如图3所示,在传统PID控制模式下参数固定,在T1时刻系统开始发散,但在T2时刻控制模式改变后,经过一个波峰的自适应调整,到T3时刻已基本消除两节调节器间的互扰。
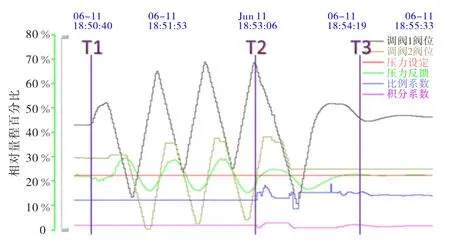
图3 耦合工况下的收敛调节图
3.2 系统的控制特性
通过1MPa的阶跃信号对改进型PI控制进行系统测试,调节曲线见图4,并从时域的6个特性方面与传统型PI控制进行比对[13],结果见表4。分析图4,在T4时刻,对压力调节进行1.0 MPa反向阶跃设定,待系统调节至稳定后,随即进行同幅度的正向阶跃测试,直至T5时刻系统进入稳定状态;同时从表4的测试数据可以看出,系统在正反向调节过程中的调整时间分别由传统的54 s和98 s分别缩短为46 s和44 s,而最大超调量也由35%和81%降低到2%左右,所以改进后系统的控制特性无论在快速响应性上还是控制稳定性上均有显著改善。
3.3 支路切换的扰动性
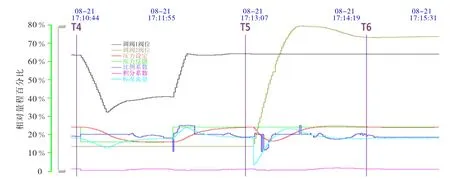
图4 控制特性及支路切换调节效果图
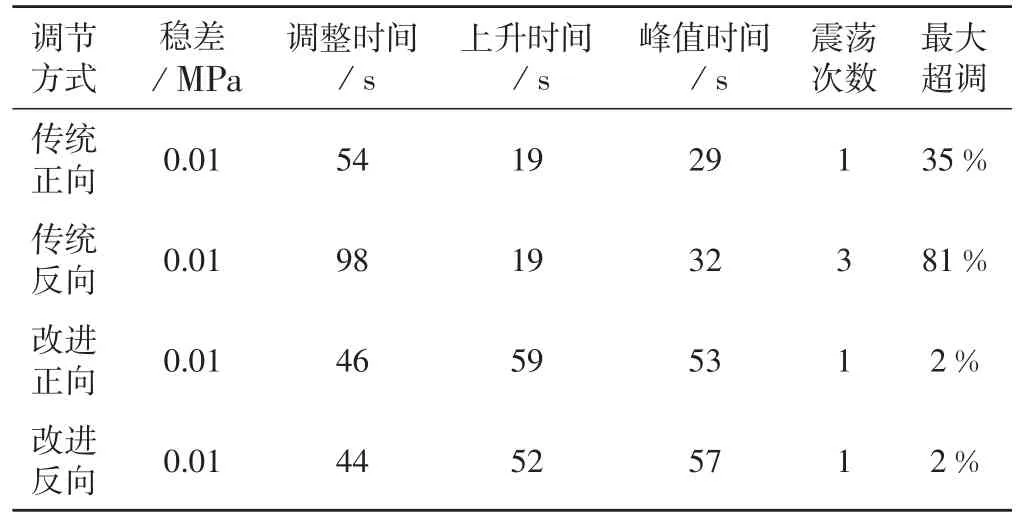
表4 压力阶跃测试表
支路切换实际是控制备用支路对主用支路进行调节补偿。实际测试时,在最高可调节压力下,将备用支路设置至最低调节特性阀位,并关闭主用支路安全切断阀以达到快速切断的目的,测试结果见表5和图4。分析图4可知,在T5时刻,主用支路(调节阀1)瞬间截断,受限于下游负荷、管容、调节阀开阀速度等因素,系统不可避免的进入欠调状态,但得益于备用支路(调节阀2)的代偿效果,在经过0.94 MPa的最大欠调,88 s的调整,到T6时刻,备用支路基本实现了对主路的补偿输配,且最大超调控制在5%左右,实现了支路间的无扰切换。

表5 压力调节支路切换测试表
4 结论
1)在控制器设计时,尤其对于未知控制对象, PID控制以其简单有效作为首要选择。但是对于本项目中这种下游负荷变化快且扰动极大的系统,传统的PID控制也存在适应性的问题。针对该情况,在传统控制领域,目前主要的方式以改进型PID系统为主,通过参数的自整定自适应来优化控制性能,通过专家经验法[14]、模糊算法、神经网络学[15]等,不同的算法对PID参数进行整定,以期获得更好的调节特性。
2)系统应用中,在总结现有相关技术的基础上,根据实际需求,选择了一种基于PI调节曲线特性,采用了以实时的误差分析和模糊计算进行分段优化的自整定技术,同时用误差变化率取代微分环节以减少回差干扰,实现了系统控制特性的改善;通过开发过程中对系统的动态响应、超调量、抗干扰能力等进行大量的测试,以及对投入生产后的实际反应进行综合分析,表明系统在抗耦合性、适应性、稳定性和支路的无扰切换方面均具有较好的性能,具备较高的应用价值[16]。
猜你喜欢
仪器仪表用户(2022年11期)2022-11-03
西安石油大学学报(自然科学版)(2022年5期)2022-10-08
仪器仪表用户(2022年10期)2022-09-29
仪器仪表用户(2022年9期)2022-08-30
仪器仪表用户(2022年4期)2022-04-01
现代畜牧科技(2021年4期)2021-07-21
流行色(2020年9期)2020-07-16
家庭影院技术(2018年9期)2018-11-02
电机与控制学报(2018年9期)2018-05-14
CHIP新电脑(2017年6期)2017-06-19
