基于肌张力特征信息检测的痉挛传感器设计与应用∗
2019-03-26 09:15汪步云魏壮壮宋在杰汪志红许德章
传感技术学报 2019年2期
汪步云,魏壮壮,宋在杰,梁 艺,,汪志红,许德章,
(1.安徽工程大学机械与汽车工程学院,安徽 芜湖241000;2.芜湖安普机器人产业技术研究院有限公司研发部,安徽芜湖241007;3.芜湖安普机器人产业技术研究院有限公司院士工作站,安徽 芜湖241007)
从被动辅助行走训练到下肢运动功能恢复这一阶段,对脑卒中患者的康复疗效至关重要[1];在此疗程,运用步态康复机器人是一种重要的治疗手段[2]。而这一阶段,由于训练强度与康复状况的不匹配,脑卒中患者容易被诱发痉挛,极易引起二次损伤,且痉挛发生有着较大的随机性,造成患者有着极大的心理负担[3]。因此,在步态康复机器人训练中融入客观量化的痉挛评价及防范控制方法是康复临床的迫切需求[4]。
康复过程中发生的痉挛,多数是由不同的中枢神经系统疾病引起的,以肌肉的不自主收缩反应和速度依赖性的牵张反射亢进为特征的运动障碍,是上运动神经元综合症的一个组成部分[5-6];亦是一种特定的运动障碍综合症,是脑卒中患者常见的并发症[7]。其外在表现为肌肉间断性或连续性抽搐并伴随着严重的疼痛[8-9]。
当前,临床医学上对痉挛的评定以主观方法为主,改良 Ashworth量表法 MAS(Modified Ashworth Scale),临床痉挛指数CSI(Clinic Spasticity Index)等。客观的评定方法,如生物力学的摆动试验方法和被动牵张方法,但在实际推广应用比较困难,难以与康复机器人相结合而进行定量准确的评估[10],更难以实时对痉挛做出动态地评价并据此指导康复机器人对训练过程中可能出现痉挛做出防范控制的决策[11]。
步态康复机器人当前更着重于将患者的下肢肌肉生理信息与步态康复训练的运动学信息相互融合,对痉挛进行在线检测及防范控制。一方面可为下肢康复训练过程中提供评价与防范,另一方面可提供一种量化临床实践和医学评价,使得下肢康复训练更合理。这是康复临床的应用趋势,也有着重要研究意义[12]。针对这一需求,目前较多是根据下肢肌张力或者肌电信号获取相关肌肉区域的生理信息。如Srdan Dordevic等人设计一种肌肉收缩的传感器[13],北京航空航天大学研制了一种皮肤肌张力测量装置[14],可用于肌张力的检测及评定;合肥工业大学张秀峰研制了肢体痉挛评测传感器并验证其评测方法[15]。上述研究在痉挛评测做出了积极有意义的探索,但目前与康复机器人训练评估与痉挛防范仍存在较大的应用差距。
本文从肌张力的角度寻求下肢痉挛检测机理及其特征信息表达,通过实验数据探寻痉挛在线测评信息,探讨外骨骼式步态机器人康复训练过程中防范痉挛的特征阈值。
1 痉挛传感器硬件系统构建
1.1 下肢肌肉痉挛的检测机理
人体肌张力包含着较为丰富的信息,根据人群的区分,肌张力的特点有着较大的区别。如何将肌张力有效测量,并实时得出较为准确的结果,是肌张力传感器设计的首要考虑因素。
康复临床研究普遍认为痉挛是肌肉持续或断续或肌群的非随意收缩,是运动神经元损伤的综合性的一部分,在痉挛发生时表现最明显。根据下肢肌肉痉挛在康复临床上的表现形式,主要分为三种[14]:即强直、阵挛、痛性痉挛。强直的典型特征是传感信息上表现为肌张力突变并且显著升高,阵挛则在肌张力出现抖动,痛性痉挛前面二者信息兼而有之。有研究指出,下肢肌肉在康复训练过程中,痉挛现象即将到来,相关信息将产生一系列有着规律的特征信号,这为痉挛检测提供可能[16]。据此,可通过传感器对康复患者的小腿后侧的比目鱼肌、大腿前侧的四头肌及其相关区域,测量相关肌张力及应激反应变化,通过激励信号的幅值跳变、频率变化及幅值-频率交替变化,映射到病理性痉挛特征,通过肌张力的特征阈值以评测痉挛,并与临床痉挛的主观评定等级相关联。
为了便于检测肌张力,对小腿的肌群进行了分析对比,痉挛在下肢上出现频率较高的为:腓骨长肌、胫前肌、比目鱼肌、腓肠肌的外侧等。根据这些痉挛在传感信息上的特点,将着重检测小腿后侧的比目鱼肌、大腿前侧的腓肠肌等区域的生理学信息[17],测量过程如图1所示。
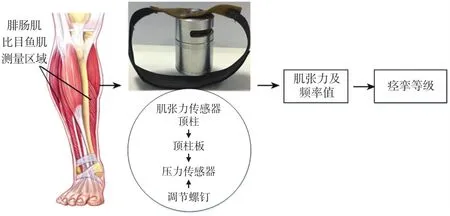
图1 下肢肌肉痉挛评测过程
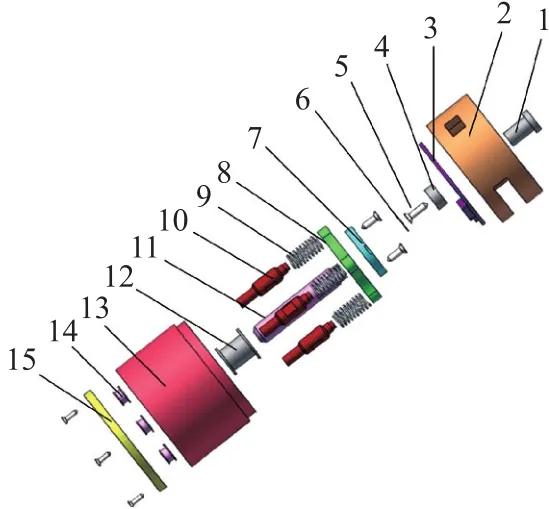
图2 痉挛传感器的爆炸图
1.2 痉挛传感器机械结构设计
依据痉挛检测原理,设计痉挛传感器机械结构如图2所示。痉挛传感器由肌张力传递模块、力敏单元模块、壳体模块和控制模块组成。
肌张力传递模块是由顶柱(10)、顶柱板(8)、导向轴(11)、阻尼弹簧(9)、凸台(7)、导套(12)和压力传感器(6)组成,顶柱及导向轴的上端通过螺纹与顶柱板相连,另一端经过壳体中间板的通孔可进行轴向滑动,导向轴上匹配阻尼弹簧套,两端分别与顶柱板和中间板相压,凸台与顶柱板通过螺钉固定,压力传感器通过软胶固定在凸台上,便于肌张力的采集。
力敏单元模块是由调节螺钉(1、4)、螺钉(5)和上端盖(2)组成,调节螺钉安装在上端盖中,圆台与调节螺钉下端面固定,调节螺钉针对不同的患者进行调节,达到合适的肌肉测量位置。
壳体模块由下端盖(15)、壳体(13)、上端盖(2)和绑带组成,下端盖通过螺钉与壳体固定,壳体与上端盖通过螺纹连接固定,绑带通过铆钉与上端盖固定。
在上述研究基础上,本文介绍了课题组研制的肌张力传感器,其主要技术指标如表1所示。其结构如图3所示。

图3 痉挛传感器实物图
1.3 痉挛传感器控制模块设计
痉挛传感器控制模块设计如图4所示:传感器内部的压力传感器受到外部肌张力变化,所检测到肌张力变化产生的激励,通过激励信号的幅值跳变、频率变化及幅值-频率交替变化,解析为病理性痉挛的三种特征,映射到病理性痉挛特征;经A/D转换后传递给主机模块,通过无线模块传递给上位机,上位机处理分析后显示痉挛的特征信息。
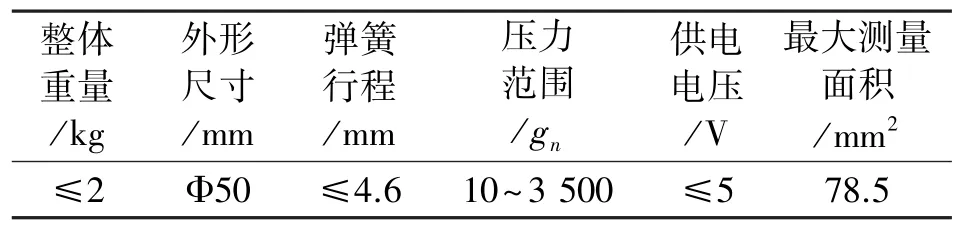
表1 痉挛传感器主要技术指标
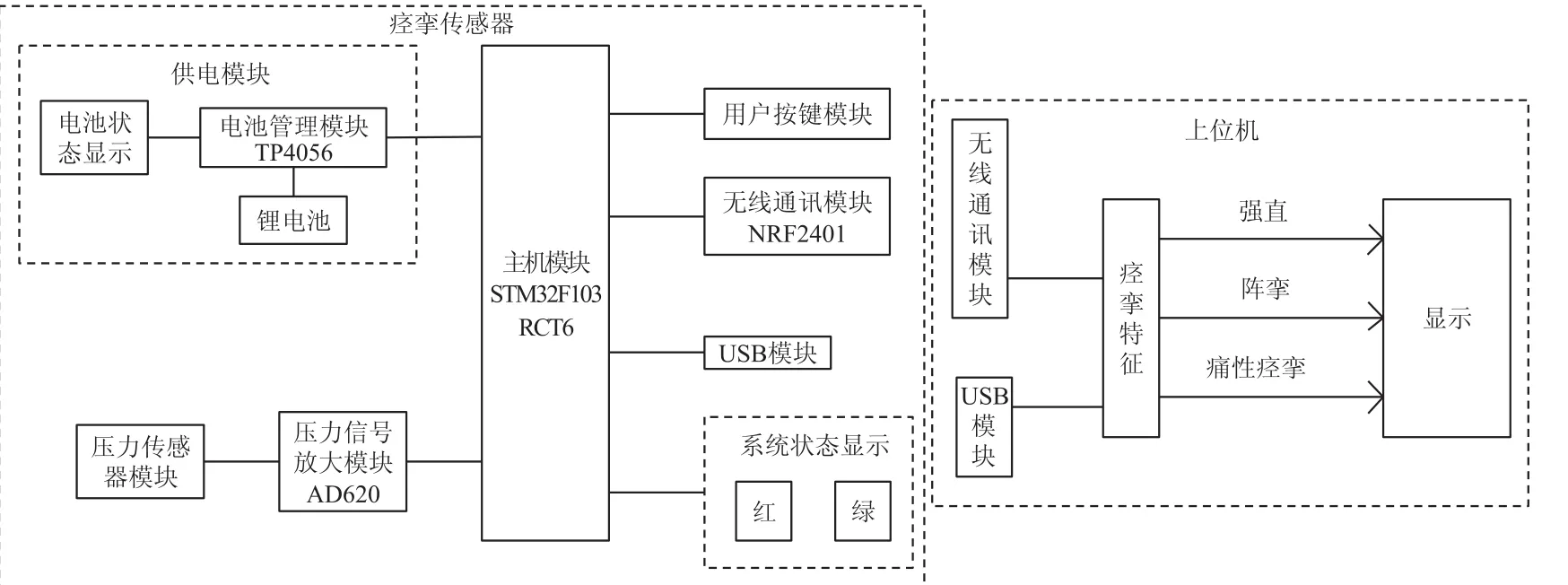
图4 痉挛传感器硬件系统框架构建
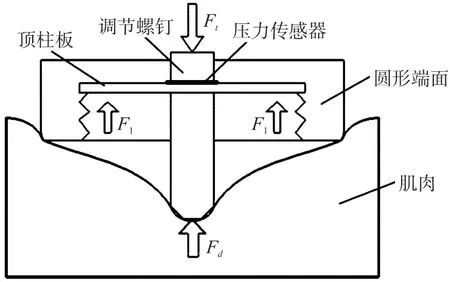
图5 肌张力检测原理图
1.4 肌张力测量修正
痉挛传感器通过绑带的作用,使顶柱探头前端压入肌肉中,调节绑带的松紧,可使肌张力传感器的端面与肌肉始终保持接触,其原理图如图5所示。
设下肢肌肉与顶柱探头的压力为Fd,绑带的预紧力为Ft,在壳体内阻尼弹簧所受的力为F1,由力平衡方程可得:
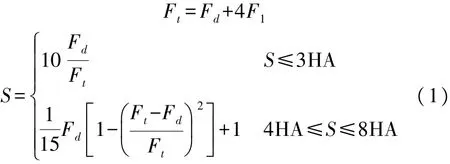
定义S为肌肉张力参数,单位HA。力学量传感器通常用g表示,临床上肌张力也用此表示。S与Fd、Ft的大小有关系,Fd(g)表示顶柱所受力大小,Ft(g)表示绷带所施加力大小。经过测试标定、分析与计算,得出线性补偿公式:(Ft-Fd)/Ft为非线性修正项,目的是降低预紧力的变化给检测过程带来的误差,其中Ft=Fd+4F1代表阻尼弹簧所受力的大小,它与肌张力呈现负相关关系,且满足力的平衡,平方项的出现表明负相关是非线性的,要进行线性处理才能使用;Fd表示肌张力,S与顶柱压力Fd之间的关系,从表2中可以看出,S与Fd之间呈正相关;由于传感器测量数据采用邵氏硬度计,精度不高,采用统计回归方程的方进行系数计算[18],系数1/15和1是线性化处理后得出的。
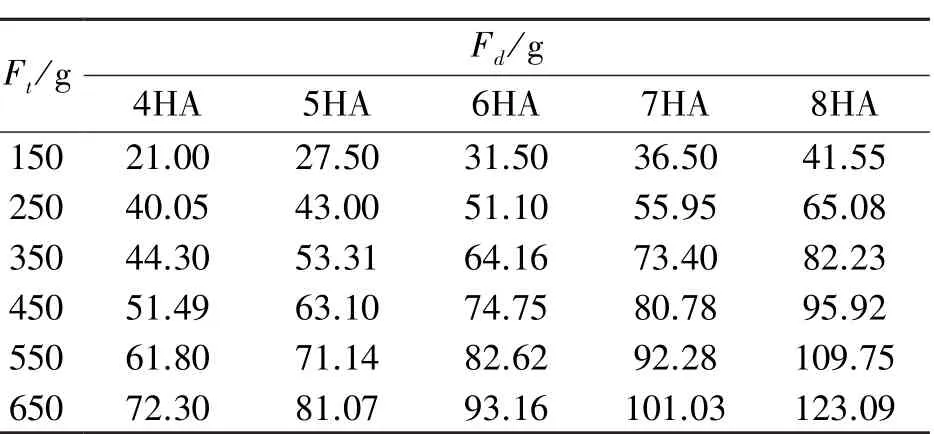
表2 标定数据
2 下肢痉挛检测机理及其特征信息表达
2.1 痉挛等级的评定
改良后的Ashworth量表MAS(Modified Ashworth Scale)被广泛运用于肌肉痉挛临床评定[18]。由于痉挛传感器的检测精度、患者下肢肌肉的恢复情况、年龄区分等因素影响会导致痉挛等级评定有一定的误差。根据患者肌张力采集及实验数据标定,将痉挛传感器评定等级分为3级,且将肌张力幅值在500 g、1 500 g,作为痉挛等级的临界值。
当检测到的肌张力幅值在500 g以下时,则认为为无痉挛发生,下肢能正常的运动;此外,由于肌肉的正常收缩,肌张力可能会在一定范围波动;当检测的肌张力的幅值在500 g~1 500 g区间,认定为中等程度痉挛,其外在特征表现为:肌肉抖动、肌肉绷紧并伴有疼痛,可以进行简单关节运动;当检测到肌张力幅值高于1 500 g时,认定为重度痉挛(包含强直与阵挛),重度痉挛时下肢关节很难完成运动,肌肉可能僵死,给患者带来较大痛苦,此时应避免关节活动以防止二次损伤[19]。
评定标准及痉挛传感器的相关参数,将痉挛压力的等级划分为3级,具体评定标准见表3。
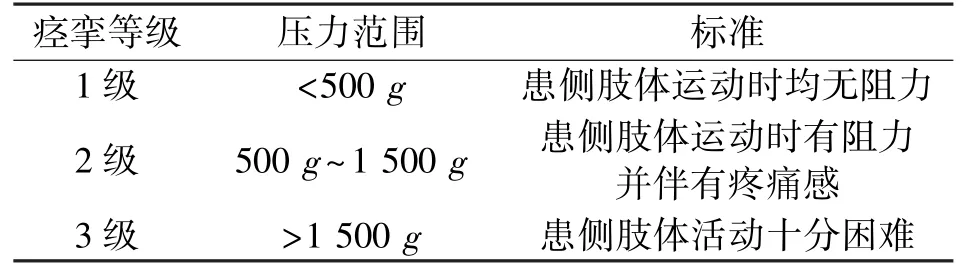
表3 各级痉挛压力设定划分
在参照主观评定的MAS及对痉挛信号的估计[20-21],本文设计的痉挛传感器只分为三档:强、中、弱,因此测试信号可以预定为以下式子表达。
①强直信号

式中:Kq为比例系数,Fq为发生痉挛的临界值,F为强直痉挛状态下肌张力值,可将其测量范围列的更宽;取 1<Kq<7,Fq取值 500 g。
在参考临床触诊和主观评定痉挛等级CSS(Composite Spasticity Scale),考虑佩戴或其他因素对痉挛信号的影响,将阵挛范围扩宽,综上信息及对痉挛信号估计,可将其测量范围列的更宽,如式(2)所示。
②阵挛信号

式中:Fz为阵挛初始值,A为发生痉挛的幅值大小,频率为ω,θ为初相,F为阵挛状态下肌张力值。幅值A的大小为|F|-Fz,ω与时间相关,根据肌肉正常的收缩与松弛,当ω>6 Hz,且Fz>500 g时代表阵挛发生。
③痛性痉挛信号

痛性痉挛外在特征表现为强直和阵挛的结合,需要满足强直和阵挛信号的阈值,超过临界值时可以判断痉挛的发生与否。
3 实验研究
3.1 肌张力对痉挛特征信息的表达测试
本研究所设计的肌张力传感器经实验标定后能稳定的实时的获取肌张力信息,通过对脑卒中患者下肢肌肉肌张力的检测得出相关测量数据。
对式(2)进行特定值的分析,针对采集肌张力的频率特征是否有明显变化,以排除阵挛、痛性痉挛两种特征,如图6所示,若肌张力的值大于人体下肢肌肉正常状态下的肌张力的值,且在30 ms以后F>500 g,满足痉挛发生的临界信息,则可判定痉挛发生。 若 Kq取值:3<Kq<7,满足 1<Kq<7 则可以判定强直发生。由于痉挛的复杂性及其多样性,会导致其结果有一定误差。
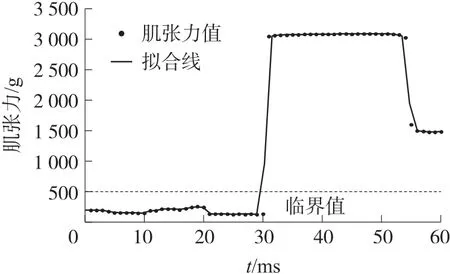
图6 强直性痉挛信号
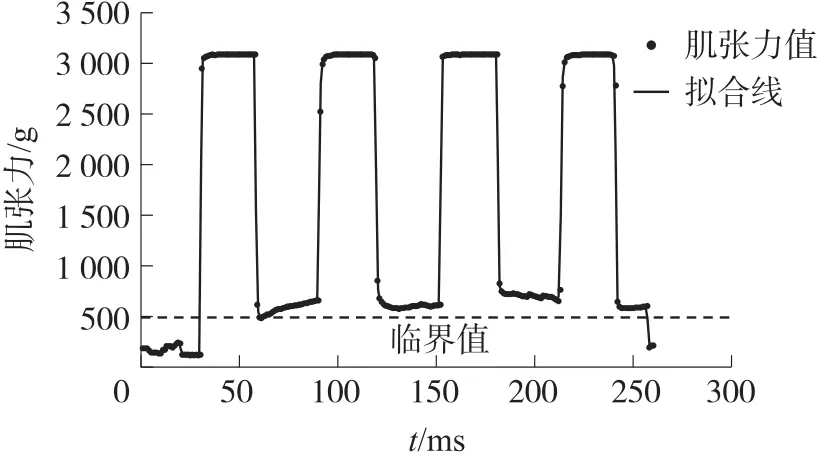
图7 阵挛性痉挛信号
对式(3)采集的特定值进行分析,肌张力若无幅值变化,则可以排除强直、痛性痉挛两种痉挛特征,如图7所示,痉挛传感器测量值大于人体下肢肌张力正常状态下的值,在30 ms以后F>500 g满足痉挛发生的临界信息,则可判定痉挛发生,若幅值A取值:500<A<2 700,ω 大于 6 Hz,且 Fz>500 g,判定痉挛发生的为阵挛。
根据以上对对痉挛的三种特征信息的分析,对式(2)、(3)、(4)进行特定值的分析,若采集的肌张力即有幅值又有频率的变化,进一步排除强直、阵挛两种痉挛特征,如图8所示,肌张力的值大于人体下肢肌肉正常状态下的肌张力的值,F>500 g则判定痉挛发生,而幅值A的大小为500<A<2700,ω>6 Hz,且 Fz>500 g,Kq的取值 3<Kq<7,满足 1<Kq<7,则判定痛性痉挛发生。
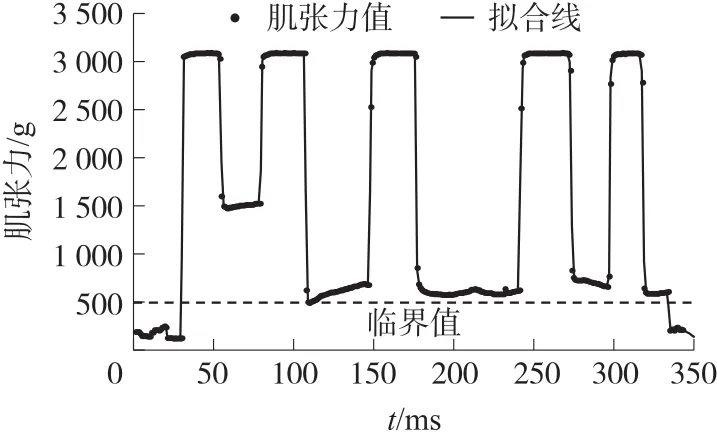
图8 痛性痉挛信号
3.2 外部激励下的肌张力测试
选取符合条件的受试者,使受试者保持站姿,肢体保持放松;受试者佩戴痉挛传感器,检查者施加均匀的手动激励在腓肠肌处并保持一段时间(激励的大小应均匀、等速),采集到腓肠肌上的肌张力信号如图9所示。

图9 手动激励佩戴痉挛传感器
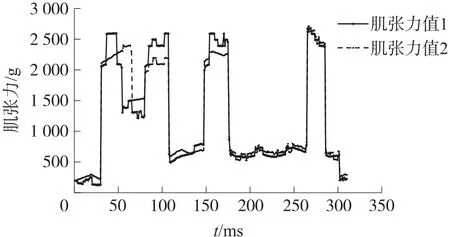
图10 手动激励肌张力信号
从图10可以看出,佩戴开始时,下肢关节还没开始运动,此时下肢肌肉测试区域肌张力的值较小,且不稳定;当手动施加激励,肌张力的值开始变化,通过测得数据的观察,数据总体呈现较大波动,其肌张力大约分布在100 g~2 800 g,根据对痉挛特征信息进行分类:肌张力大于1 500 g的数据占少数,发生痉挛为3等级的时间段较少。根据实测数据对强直、阵挛、痛性痉挛的特征进行在线测评。肌张力的值在500 g~1 500 g之间时,由于浮动不大且较稳定,根据强直的特点及Kz的大小(1<Kz<6)可以判断出175 ms~260 ms时表现为强直特征,50 ms~90 ms表现为阵挛特征。可以看出,痉挛传感器测得的肌张力信号较为稳定,但肌肉张紧度存在人群差异,进而导致肌张力的大小也不尽相同。
结合课题组设计的外骨骼式下肢步态康复机器人进行实验,人体下肢穿上外骨骼式步态康复机器人后,利用痉挛传感器采集下肢腓肠肌的肌张力信号,如图11所示。进一步,康复机器人匀速施加激励,拉伸受试者的膝关节进行运动,反复从站立的初始状态拉伸至关节最大活动范围,腓肠肌区域的肌张力表现如图12所示。

图11 外骨骼机器人关节激励下的肌张力信号
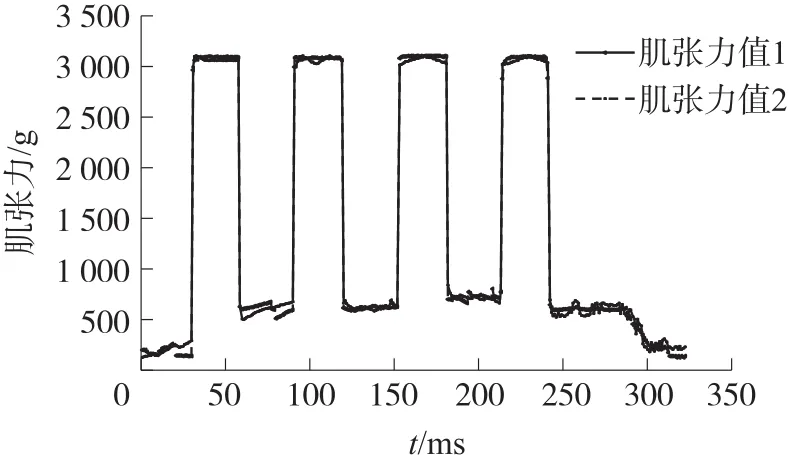
图12 康复机器人激励下的肌张力信号
根据痉挛传感器采集的数据及其分布规律,可以看出:
(1)测得肌张力数据总体为矩形状,其肌张力的大小分布在100 g~3 100 g,这与外骨骼式康复机器人匀速施加激励的效果是一致的。
(2)当受试者下肢没有运动,则肌张力的值较小,且不稳定;当开始关节被动拉伸时,随着下肢活动的角度的改变,肌张力的值也在改变。
(3)根据痉挛特征信息在线评测结果,肌张力大于1 500 g的数据占多数,根据病理性痉挛的特征可以看出实测数据中均包含阵挛、强直、痛性痉挛的特点。若肌张力值在500 g~1 500 g之间时,肌张力的值虽有波动但比较稳定,根据强直特点及Kz取值(1<Kz<7)可判断出在30 ms~240 ms表现为强直特征,240 ms~285 ms表现为阵挛。可以看出,康复机器人施加激励,运用痉挛传感器评定肌张力及其特征较为准确。通过对上述实验,所设计的痉挛传感器可用于康复训练过程中肌张力在线测评与痉挛防范控制。
5 结论
本文从痉挛发生时的特征信息出发,结合康复医学临床评定痉挛等级的依据与方法,设计了一种可用于康复机器人在线测评肌张力的痉挛传感器,将肌肉张力变化的激励转换为痉挛特征信息,揭示痉挛发生的临界信息,为下肢肌肉的病理性痉挛提供客观量化的评定依据。
参照康复医学上对痉挛评定的相关量表,给出基于肌张力检测的传感器评定痉挛等级的标准。通过对实验对象采集的相关数据分析、处理和整理,区分出病理性痉挛的三种特征信息,验证了痉挛传感器检测的可行性及判断痉挛等级的正确性。
猜你喜欢
全科护理(2022年3期)2022-02-18
中风与神经疾病杂志(2021年11期)2021-12-23
临床神经病学杂志(2017年6期)2018-01-13
临床神经病学杂志(2017年2期)2017-04-27
中国现代神经疾病杂志(2017年1期)2017-03-29
广东药科大学学报(2016年6期)2016-03-10
中国医疗美容(2015年1期)2015-07-12
中国卫生标准管理(2015年8期)2015-01-26
中国神经免疫学和神经病学杂志(2014年5期)2014-05-08
中医研究(2014年10期)2014-03-11