
基于概率模型检测的机电系统动态可靠性评价
2019-03-25 06:34杨培林樊娟妮
中国机械工程 2019年5期
侯 翌 杨培林 徐 凯 刘 青 樊娟妮
1.西安交通大学机械工程学院,西安,7100492.西北工业集团有限公司计量理化一中心,西安,710043
0 引言
随着机电一体化技术的发展,机电系统的集成度和复杂程度越来越高,不仅机电系统的性能会随时间发生变化,而且系统组成单元之间往往具有复杂的耦合关系,因此机电系统的动态可靠性越来越引起人们的关注。
目前对系统动态可靠性进行分析评价的主要方法有状态空间法、动态故障树分析(dynamic fault tree analysis,DFTA)法、Petri网等[1-2]。状态空间法以马尔可夫(Markov)模型为基础,通过求解状态转移方程计算系统可靠性指标,但当系统规模较大时,直接应用马尔可夫过程理论建立系统的可靠性模型比较困难[3]。DFTA在传统故障树分析(fault tree analysis,FTA)的基础上增加了一些用于描述动态特性的逻辑门,如功能相关门、顺序强制门、优先与门等,在一定程度上加强了其动态描述性能,并通过转化为马尔可夫模型或动态贝叶斯网络得到了定量结果[4-6],但当系统较复杂时,动态故障树建模困难。Petri方法具有图形化建模和定量数学计算的优点,可以利用马尔可夫过程理论或蒙特卡罗(Monte Carlo)仿真计算可靠性指标,但系统较复杂时,也会增加Petri网的建模难度[7]。
模型检测是一种形式化的自动验证技术,用于检验有限状态系统是否满足某种给定性质[8-11]。概率模型检测是对模型检测的拓展,它不仅能够验证系统性质的正确性,还能够自动计算系统性质出现的概率[12-13]。本文对概率模型检测进行了介绍并将其引入机电系统的动态可靠性评价中,通过对机电系统可靠性问题的形式化建模、可靠性指标的形式化规约,利用概率模型检测工具自动计算可靠性指标,实现基于概率模型检测的机电系统动态可靠性评价。
1 模型检测及概率模型检测
模型检测是一种形式化方法,它首先以某种形式化语言对系统状态变迁进行描述,即对系统进行形式化建模,然后以时序逻辑公式描述所期望的某种性质,即建立性质的形式化规约,最后利用模型检测工具来搜索系统模型的有穷状态空间,自动检验系统是否满足所期望的性质。当系统不满足所期望的性质时,将给出反例说明性质为何不成立。
概率模型检测中的形式化模型是一种随机模型,它反映了系统状态变迁的随机特性。概率模型检测也需要利用包含概率信息的时序逻辑语言对所要验证的性质进行描述,如“系统处于某状态的概率小于0.001”等,因此通过概率模型检测不仅可以判断某性质是否会发生,而且能计算该性质发生的概率。
概率模型检测可以通过概率模型检测工具PRISM来进行[14]。作为一种广泛使用的概率模型检测工具,PRISM支持多种概率模型,如连续时间马尔可夫链(continuous time Markov chains,CTMC)、马尔可夫决策(Markov decision processes,MDP)、概率时间自动机(probabilistic timed automata,PTA)等。PRISM采用二叉决策图(binary decision diagram,BDD)和多端二叉决策图(multi-terminal binary decision diagram,MTBDD)两种数据结构,并融合了图论计算和数值计算两类计算技术,所以可以构建和计算非常大的系统可达状态空间,并有很高的数值计算效率,适用于复杂系统的概率模型检验。
2 可靠性指标形式化规约及可靠性评价
为了基于概率模型检测实现机电系统的动态可靠性评估,本文利用PRISM提供的形式化建模语言建立机电系统的形式化模型,用连续随机逻辑(continuous stochastic logics,CSL)对机电系统的可靠性指标进行形式化规约。
2.1 机电系统的形式化建模
概率模型检测工具PRISM提供的形式化建模语言包括模块(modules)和变量(variables)两种基本元素[14]。模型由一个或多个模块构成,一个模块包含一个或多个变量,变量用来描述状态。模块的定义形式为
module name
⋮
endmodule
模块的行为通过命令(commands)来定义,命令由守卫(guard)和更新(update)组成,命令的形式为
[] guard ->prob:update
一条命令反映了一次状态变迁过程,其中guard描述的是状态变迁需要满足的条件,当条件满足时便可进行状态的变迁(更新)。update为变迁(更新)后的状态,状态变迁过程的状态转移率由prob表达。命令前面的方括号[]中可添加执行标记,标记相同的命令是同步执行的。
对机电系统进行形式化建模时,每个组成单元用一个模块来描述,各个模块组成整个系统的形式化模型。模块中的命令反映了单元状态的变迁条件、变迁后的状态及状态转移率等信息。对于动态可靠性中的相关失效问题,单元失效之间的关联性可在变迁条件中进行描述。
2.2 可靠性指标的形式化规约及可靠性评价
PRISM支持多种形式化规约语言,对基于CTMC的系统形式化模型,PRISM用连续随机逻辑CSL来描述所期望的性质。由于系统的状态变迁过程都对应一条状态路径,因此CSL定义了状态公式和路径公式,分别用于描述系统所处的状态及状态在路径上的时序关系。
状态公式的巴科斯范式为
-φ∷true|a|φ∧φ| ┐φ|S~c[φ]|P~c[ψ]
(1)
其中,a表示每个原子公式都是状态公式;符号∧和┐分别表示逻辑与和逻辑非;“~”表示运算符,~ ∈{<, >, ≤, ≥},S~c[φ]表示状态φ成立的概率满足比较运算符指定的约束c,P~c[ψ]表示路径ψ成立的概率满足比较运算符指定的约束c。
路径公式的巴科斯范式为
-ψ∷=XIφ|φ1UIφ2
(2)
其中,“X”和“U”为时态算子,分别表示“下一步”和 “直到”,XIφ描述了从当前状态下经过时间段I进入状态φ;φ1UIφ2表示在时间段I内,状态φ1一直成立直到状态φ2成立。
PRISM对CSL进行了扩展,在路径公式中添加了时态算子“G”(表示全局)和“F”(表示将来某时刻),同时引入操作符“P=?”和“S=?”分别用于描述一个路径公式成立的概率以及一个状态的稳态概率。另外PRISM对逻辑运算符作了重新定义,如用“&”表示“∧”,用“<=”表示“≤”等。
对机电系统进行可靠性评价时,对所关注的系统状态用上述状态公式进行规约,并用路径公式规约相应的可靠性指标。例如若关注某系统“单元R处于状态r并且单元Q处于状态q”这一状态在时间t内出现的概率,则针对这一评价指标建立的CSL规约表达式为
P=?[F=tR=r&Q=q]
(3)
式(3)表示时间t内“单元R处于状态r并且单元Q处于状态q”的概率是多少。
将上述机电系统的形式化模型及可靠性指标的CSL规约表达式输入概率模型检测工具PRISM,即可针对CSL规约表达式进行模型检验并能自动求解表达式成立的概率,从而实现可靠性评价。
3 实例分析
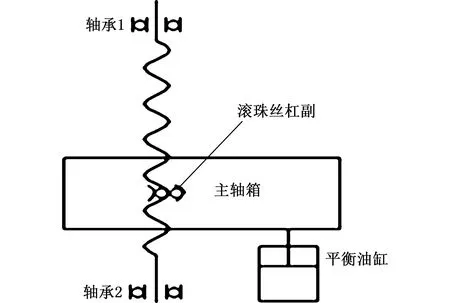
图1 主轴箱驱动系统原理Fig.1 Principle of spindle box drive system
图1为某五轴联动数控机床主轴箱的驱动系统示意图。系统通过安装平衡油缸来平衡主轴箱的自重,从而减轻电机、丝杠和轴承等部件的负载。当平衡油缸正常工作时,由于平衡油缸的平衡作用,滚珠丝杠及轴承所受负载较小。当平衡油缸系统由于某种原因造成油液泄漏而使油缸支撑失效时,丝杠和轴承2(推力轴承)会承受比油缸正常工作时更大的负载(轴承1为向心轴承,忽略油缸对其影响),其寿命也会随之下降,即由于平衡油缸的失效会加剧其他部件的失效,因此该系统的失效为相关失效。
设所有部件的寿命服从指数分布,平衡油缸的失效率为8(10-6h-1),其他部件的失效率如表1所示。

表1 各部件的失效率
上述主轴箱驱动系统的正常工作条件是滚珠丝杠、轴承1及轴承2正常工作,平衡油缸的作用只是减缓系统的失效。按照前文提到的方法,可以建立系统的形式化模型,如图2所示。其中平衡油缸对轴承2和滚珠丝杠失效的影响体现在相应的状态变迁条件中,见图2b和图2d所示的模型。
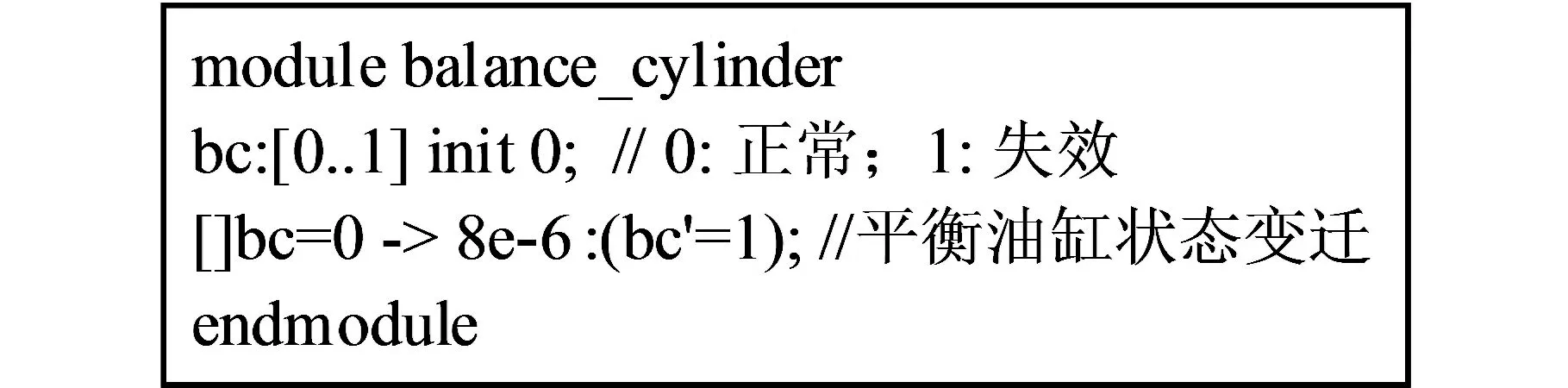
(a)平衡油缸模型

(b)滚珠丝杠模型

(c)轴承1模型

(d)轴承2模型图2 主轴箱驱动系统形式化模型Fig.2 Formal model of spindle box drive system
依据主轴箱驱动系统的正常工作条件,可建立如下的可靠性评价指标形式化规约:
P=?[F=tba=0&b1=0&b2=0]
(4)
式(4)表示主轴箱驱动系统在时间t内正常工作的概率,即可靠度。依据上述形式化模型及可靠性指标形式化规约,通过PRISM进行模型检测,可求得系统可靠度,如图3所示。

图3 主轴箱驱动系统可靠度Fig.3 Reliability of spindle box drive system
为了验证上述计算结果的正确性,本文也用状态空间法[15]对此进行计算。该实例涉及四个组成单元(平衡油缸、滚珠丝杠、轴承1及轴承2),考虑每个单元有正常与失效两种状态,四个单元组成的系统共有24= 16个状态。根据状态之间的转移率(失效率)可画出状态转移图并据此建立16×16阶的状态转移密度矩阵A(限于篇幅,状态转移图及转移密度矩阵在此不再列出),由状态空间法建立如下的矩阵微分方程:

(5)
P(t)=(p1(t),p2(t),…,p16(t))
其中,P(t)为系统状态行向量。
求解该微分方程组,可得系统处于正常状态的概率(可靠度)为
(6)
式(6)的计算结果与基于PRISM的计算结果完全一致,如图3所示。
在该实例中,若不考虑失效相关性,即不计平衡油缸失效对其他部件失效的影响,则可按传统方法计算系统的可靠度。由于滚珠丝杠、轴承1及轴承2在功能上是串联关系,可得到不考虑失效相关时的系统可靠度为
R(t)=Rbs·Rb1·Rb2= e-9×10-6t·e-16×10-6t·e-16×10-6t=e-41×10-6t
(7)
式中,Rbs、Rb1、Rb2分别为滚珠丝杠、轴承1和轴承2的可靠度。
主轴箱驱动系统可靠度计算结果如图3所示。可以看出在不考虑失效相关时计算得到的系统可靠度要大于考虑失效相关时所得到的可靠度,这会使可靠性评价产生较大的偏差。
4 结论
(1)利用模型检测工具提供的形式化建模语言可以描述系统单元的状态变迁过程,单元失效之间的关联性可体现在状态变迁条件中。
(2)只需分别建立各个单元的状态变迁模型(模块),即可构建出整个系统的形式化模型,系统建模过程简单方便。
(3)通过对可靠性指标的形式化规约,借助模型检测可自动计算各种可靠性指标,提高了可靠性评价的效率。
猜你喜欢
北方民族大学学报(2021年5期)2021-11-27
中学生数理化·高一版(2021年3期)2021-06-09
科学与财富(2021年35期)2021-05-10
装备制造技术(2020年4期)2020-12-25
北京航空航天大学学报(2018年10期)2018-10-30
中国惯性技术学报(2017年5期)2017-12-02
中国新技术新产品(2016年21期)2016-12-08
中学生数理化·中考版(2015年10期)2015-09-10
汽车零部件(2014年5期)2014-11-11
数学教学通讯·初中版(2014年2期)2014-03-21
