STP系统列车定位方法研究
2019-03-22 06:36李晗韩波
中国铁路 2019年3期
李晗,韩波
(1.中交机电工程局有限公司 武汉技术中心,湖北 武汉 430060;2.中国铁道科学研究院集团有限公司 通信信号研究所,北京 100081)
1 STP系统及其特点
无线调车机车信号和监控系统(STP)是保障车站调车作业安全的重要行车辅助设备,目前已广泛应用在车站的调车作业安全监督中[1-3]。STP系统利用无线通信,能够实时地实现机车和地面间状态信息交换的闭环监控,包括站场进路信息、信号机状态信息、调车机车运行状态等与调车作业安全密切相关的信息。同时,STP车载主机配合列车运行监控装置(LKJ)构成的车载系统能够有效防止调车作业中冒进防护信号、冲撞土挡、行车作业超速等危险事件,既保证站内调车作业的安全,又满足铁路发展安全高效的要求。STP系统结构见图1,系统具有如下特点:
(1)作为保障作业安全的行车辅助设备,系统车载设备和地面设备所采用的计算机平台均为非安全计算机平台,因此系统适用相对较低的安全标准。STP系统与通用机车信号设备具有相同安全级别,属于中国列车运行控制系统CTCS-0级[4]。
(2)采用数传电台进行车地间无线通信,数传电台覆盖范围受地形地貌及信号干扰的限制,存在较多盲点,因此STP系统运行到盲点区域时会造成车地无线连接失败,从而丢失机车位置信息。
(3)采用无源应答器进行注册入网和初始坐标定位。STP系统和LKJ结合而成的车载系统在调车模式下,具备站内调车信号机的列车速度防护、机车走行距离位置跟踪、机车运行数据记录、应答器信息读取等功能。
(4)系统应用范围主要集中在车站集中区,车站站内轨道区段长度普遍较短,为避免对正线列车运行的影响,STP系统无源应答器安装地点要避开正线列车走行区域,同时为降低工程成本,无源应答器的布点数量不应过多。
综合上述应用特点可知,STP系统安全等级并不高,可以采用轨道电路区段占用逻辑来实现。为解决溜放作业时列车坐标丢失的问题,将STP系统的位置跟踪实现分为2部分,其中机车部分的定位方法采用基于应答器定位点+测速传感器的位置跟踪,而车列部分的定位方法采用基于轨道电路+测速传感器的位置跟踪。

图1 STP系统结构
2 调车作业场景分析
调车作业有特定的作业场景,通过对调车作业过程进行分析,将其划分为9个应用场景,并描述STP系统在各场景下应具备的功能。正常状况下6个应用场景:入网注册、退网注销、存车线连挂作业、牵引作业、推进作业、溜放作业;特殊情况下2个应用场景:机车停车后人工解锁、机车行进中人工解锁;异常情况下1个应用场景:STP设备丢失防护距离后,通过LKJ发出报警,司乘人员确认后退出STP系统。常见调车作业场景的特点如下:
(1)牵引模式。该作业模式下,机车位于前进车列的最前方,调车机车头与前方信号机的距离和整体车列与前方信号机的距离一致。
(2)推进模式。该作业模式下,机车位于前进车列的最后方,调车机车头与前方信号机的距离和整体车列与前方信号机的距离相差整个车列的车长。
(3)存车线编组作业和解编作业,以及咽喉区往存车线进行溜放作业是调车机在推进模式下的几种特殊作业场景,车列长度在作业前后均会变化,进而丢失车列距前方信号机的距离。
3 STP系统定位方法
定位功能是STP系统实现的难点,在此重点对机车的单机定位和连挂后整体车列的定位进行讨论。
3.1 机车定位功能
机车单机在站场图坐标系中的位置坐标需要从向STP系统申请入网注册开始持续到注销退网,并保持坐标的连续性,以避免突变。考虑到现场调车作业多为折返路径(见图2),在应答器1处入网,按照路径1走行至股道并沿着路径2折返时,继续以应答器1作为路径2的坐标原点已不合适,因此机车走行过程中,伴随着每次机车手柄换向都需要对坐标原点进行更替。

图2 调车作业路径示意图
股道出站信号机与实际应答器点一起构成坐标原点集合,供坐标原点切换时使用。现场距离测量时应尽量保证股道信号机与应答器之间测量距离的准确。给定有限的2个状态1、2以及3个触发事件a、b、c,构建机车坐标原点定位状态变换模型(见图3)。图3中,状态1为坐标原点未知状态,状态2为坐标原点已知状态;事件a为过应答器入网,事件b为过应答器退网,事件c为过应答器刷新坐标原点或机车手柄换向刷新原点。
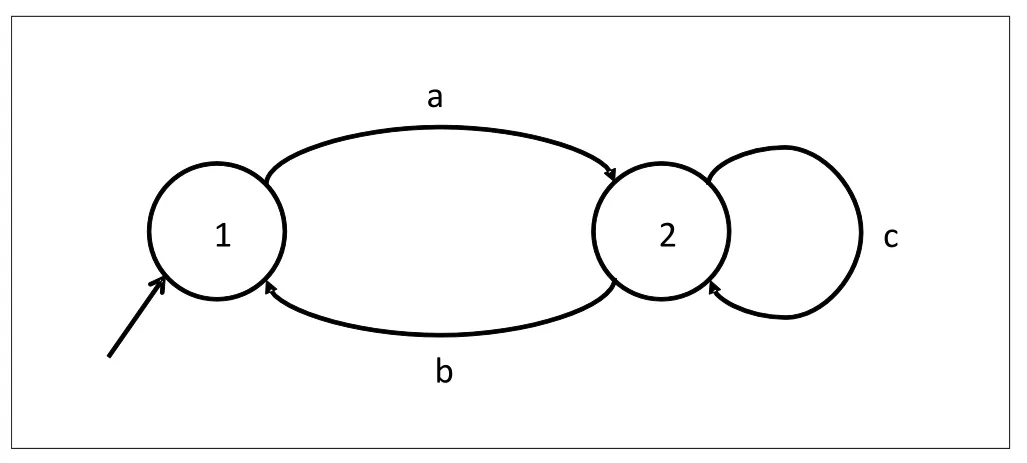
图3 机车坐标原点定位状态变换模型
3.2 车列定位功能
STP系统车列定位在推进作业时需要考虑连挂车辆的长度。连挂车辆的车列位置坐标在车列长度发生变化时会暂时处于未知状态,连挂结束后车列总长度可以通过乘务员手动输入或利用轨道电路的占用或出清时刻的坐标差进行自动计算。在此只讨论按后一种方式进行车长的自动计算。
给定有限的5个状态1、2、3、4、5以及4个触发事件a、b、c、d,构建基于轨道电路的车列坐标定位及车长计算的状态变换模型(见图4)。图4中,状态1表示机车坐标已知但车列坐标未知,状态2表示车列头部坐标已知但车列尾部坐标未知,状态3表示车列尾部坐标已知且车列头部坐标已知,状态4表示车列尾部坐标已知但车列头部坐标未知,状态5表示车列距前方信号机距离已知;事件a表示当前进路前方区段占红,事件b表示当前进路已占红区段后方出清,事件c表示车列丢失尾部定位坐标,事件d表示车列丢失头部定位坐标。

图4 车列坐标定位及车长计算的状态变换模型
3.3 定位误差分析
基于轨道电路状态变化实现的定位算法容易存在定位误差,误差随着时间的累积可能会超过站场内部分段区段的长度,甚至可能会出现机车实际位置与轨道电路实际占用区段不一致的情况,因此需要对定位误差进行更新。考虑工程经济性,在有限的应答器布点情况下,尽量将应答器布点在咽喉区或用于机车折返频繁的无岔区段,例如图2中所示应答器2的布点位置。
3.4 车列前方信号机切换
STP系统在牵引作业和无解编推进作业时,更新车列前方信号机信号以车列前方进路区段占红为触发条件。给定2个有限状态1、2及1个触发事件a构建车列前方信号机切换模型(见图5)。图5中,状态1为车列当前前方信号机1,状态2为车列前方信号机2;事件a为车列过信号机1的绝缘节。
车列距前方信号机的距离计算如下:当车列越过开放进路上的绝缘节触发下一区段占红时,车列距前方信号机距离即剩余进路中下一基本进路包含区段的长度。当机车换向时,换向后前方信号机距坐标原点的距离值与机车距坐标原点距离值的差值(换向后如为推进模式则需减去车列长度)即为车列距前方信号机距离。

图5 车列前方信号机切换模型
3.5 特殊情况下机车标签化处理
在溜放作业时,由于车列在轨道电路中的占红红光带会从中间断开且前方红光带会继续向前延伸,无法判断溜放车列的长度,此时车列会丢失前方信号机信号和距离。与此相同的现象会发生在机车牵引列车或推进列车经过前方进路中包含分路不良区段时,已占红区段由于所含分路不良区段的红光带闪烁而从中间断开,形成前后2个红光带。上述情况会干扰基于轨道电路占用逻辑的车列定位功能,从而造成STP系统对车列前方信号机错误切换。因此考虑采用标签化方式对机车与车列的相对位置进行标签化建模。标签化功能的实现由STP地面系统完成。以机车的上行方向(从右往左)为例,约定规则如下:
(1)地面系统开机时标签为0。
(2)移动的红光带标签包含1。
(3)红光带合并分为左合和右合2种形式。例如,标签0左合1记为标签10,标签0右合1记为标签01,标签0左合0或右合0均记为标签00,将标签00简记为0。红光带合并又可细分为2种情况:2个标签不同时含1的红光带合并,2个标签同时含1的红光带合并;共有1010、0101、0110、010四种异常标签,其中异常标签0110合并为异常标签010需司乘人员手动确认,否则维持异常标签0110不变。红光带合并时标签变化的自动机模型见表1。
(4)考虑地面系统开机时标签的初始状态和地面系统运行时存车线经停列车后的标签状态,红光带中间分断时标签变化自动机模型见表2。例如,标签01的左断开和右断开结果一样,均为标签0和标签1,标签011的左断开结果为标签0和标签11,右断开结果为标签01和标签1。
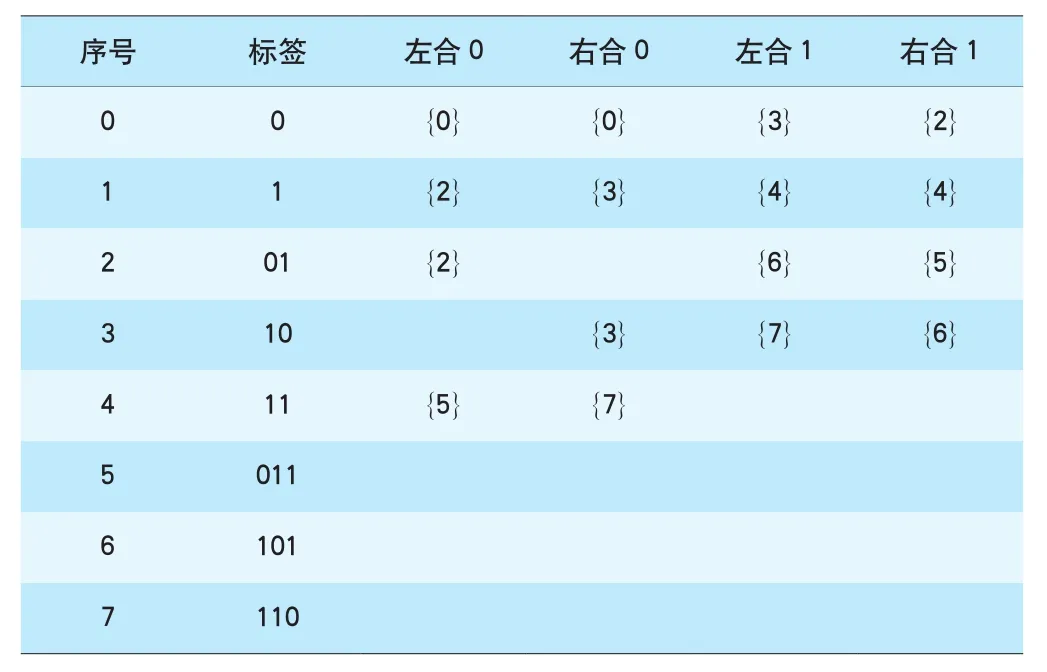
表1 红光带合并时标签变化自动机模型

表2 红光带中间分断时标签变化自动机模型
表1为2个红光带合并时标签状态变化的自动机模型。第1列是标签序号,表示标签所有可能的8种状态;第2列是标签内容,用字符串表示;第3列/第5列和第4列/第6列的列值是标签序号的集合,表示标签从某一状态经过左合或右合事件触发后可能跳转到的目标标签,列值为空时表示空集。
表2为2个红光带分断时标签状态变化的自动机模型。第1列是标签序号,表示标签所有可能的8种状态;第2列是标签内容,用字符串表示;第3列和第4列的列值是标签序号的集合,表示标签从某一状态经过左断开或右断开事件触发后可能跳转到的目标标签。表2中的第1行和第2行表示STP系统在存车线内已存有机车情况下开机时的初始情况。
当然,STP系统地面设备计算标签状态变换还需要STP系统入网机车车载设备返回的车列定位配合计算,才能最终准确无误地完成特殊情况下标签状态的判断。
3.6 机车坐标丢失情况处理
由于STP设备的稳定性存在局限性,一些特定的故障,例如无线通信异常中断、STP车载设备与LKJ通信中断等均会造成机车定位坐标丢失,从而使STP系统对车列前方关闭信号机的防护功能无法正常工作。因此需要对坐标丢失情况进行特殊处理,可以设计STP系统在机车定位坐标丢失时触发LKJ报警,提示司乘人员STP系统故障,在司乘人员确认STP故障后,该机车自动退网注销。另外,也可让STP系统的无线通信网络搭载在GSM-R通信网上,提高STP系统无线通信的稳定性[5],保证STP系统定位坐标的连续可靠。
4 结束语
将STP系统的定位功能划分为机车定位和车列定位2部分,并对机车定位采用基于应答器定位+测速传感器的定位坐标计算模型,以及无线通信实现连续跟踪,使机车定位摆脱轨道电路分路不良问题的影响,保证机车位置坐标的相对独立和稳定。采用标签方式跟踪机车和车列的相对位置,能够稳定且准确地获得机车在车列头部或尾部的信息,便于STP系统对车列作业模式进行判断。
猜你喜欢
广东教学报·教育综合(2022年45期)2022-05-05
铁路通信信号工程技术(2021年12期)2021-12-31
铁道通信信号(2021年9期)2021-10-19
铁道通信信号(2020年5期)2020-09-21
铁道通信信号(2020年4期)2020-09-21
铁道通信信号(2020年2期)2020-09-21
铁道通信信号(2020年11期)2020-02-07
铁道通信信号(2020年9期)2020-02-06
铁道通信信号(2019年10期)2019-11-25
铁道通信信号(2019年7期)2019-10-08