基于在轨组装维护的模块化深空探测器技术进展与应用研究
2019-03-21 03:17:50刘华伟李伟杰田百义丁继锋曾福明王耀兵王光远
深空探测学报 2019年6期
刘华伟,李伟杰,田百义,丁继锋,曾福明,王耀兵,王光远
(北京空间飞行器总体设计部,北京 100094)
引 言
深空探测是指通过航天器对地外天体空间进行探测,主要包括空间资源利用、人类生存空间扩展探索、太阳系和宇宙起源与演化探索等。自20世纪50年代开始,美国和前苏联相继启动月球探测计划开始,世界各国共计实施深空探测任务达240余次,统计表明其任务成功率约56%,这足以体现出深空探测的高风险特性[1-2]。月球和火星探测是深空探测的热点,旨在探测距离地球相对较近的两个天体的空间环境、天体物质分布,尤其是针对火星有无生命信息进行探测等。除此之外,关于其他天体包括太阳、金星、小行星、土星及木星等均有相关探测任务先后实施。根据2016年中国航天白皮书规划[3],在当前已开展的探月工程以及在研的月球及火星探测计划基础上,中国将拓展深空探测领域任务实施,包括小行星探测、火星取样返回及木星与行星穿越探测等。关于深空探测航天器系统研制的关键技术,研究认为一般包括高效推进、智能自主、测控通信以及新型轨道设计等[1-2]。为适应深空探测发展新需求,国外自2000年以后相继提出了众多新型探测器计划,其中部分任务已经成功实施,其技术特点突出体现在航天器的模块化设计、为应对复杂探测任务所开发的在轨组装与维护技术等。
在轨服务指在通过人、机器人或两者协同完成涉及延长各类航天器寿命、提升执行任务能力的一种操作[4],是构建大型空间系统的亟需手段[5]。实际上,在轨服务是一项复杂的系统工程,而在轨组装与维护是在轨服务航天器的主要内涵所在,其中对于航天器的模块化设计则是实现组装与维护的主要技术手段[6-7]。关于在轨服务航天器发展历程,国外早在20世纪60年代就开始,通过Nimbus 卫星、MMS(Multi-Mission Spacecraft)平台、哈勃太空望远镜、国际空间站、ETS-VII、轨道快车等典型计划的成功飞行验证,为在轨服务航天器系统技术发展打下了坚实的基础。调研发现,在轨服务航天器领域迄今为止共有130 多项相关航天器项目报道[8]。其中,在深空探测领域的相关技术应用也不断得到体现,尤其是基于在轨组装的复杂深空探测器系统和布置于SEL2(Sun-Earth Libration 2,SEL2)轨道的超大型空间望远镜系统等。值得一提的是,2016年我国发布的“十三五”规划纲要草案将“深空探测及空间飞行器在轨服务与维护系统”作为“科技创新2030——重大项目”6大重大科技项目之一。
本文首先对国外在深空探测领域应用航天器在轨组装与维护技术进展进行概括总结,梳理典型的探测器任务并进行归类分析,突出介绍相关任务的主要技术特点,并以此为基础分析基于组装维护的深空探测器系统关键技术体系。同时,提出一种应用在轨组装技术的火星多任务探测器系统设想,介绍了探测器系统的任务架构、基本组成、轨道策略等。最后,针对国外技术发展调研总结,以及所提出的火星多任务探测器系统设想进行总结讨论,就航天器在轨组装与维护技术在深空探测领域的应用提出发展建议。
1 国外技术调研
通过调研,国外在深空探测航天器领域有报道的应用模块化设计、在轨组装与维护技术的相关任务多达近30 余项[8],其中典型项目如表1 所示,对应的深空探测器系统基本特征见图1~6。总的来说,深空探测器可以划分为以下4 大类:包括模块化月球着陆器;模块化大型深空探测器;超大型空间望远镜系统;新型深空探测器等。上述深空探测器主要聚焦于月球探测和火星探测、应用在轨组装技术的部署于SEL2 轨道的超大型空间望远镜系统,以及面向火星探测、地火转移服务的在轨组装的大型深空探测等。

表1 应用模块化设计及在轨组装维护技术的国外典型深空探测器项目[8]Table 1 Typical foreign deep-space probe projects applying modular design and on-orbit assembly and maintenance technology[8]
1.1 模块化月球着陆器
月球大气和尘埃环境探测器(Lunar Atmosphere and Dust Environment Explorer,LADEE)由美国国家航空航天局(National Aeronautics and Space Administration,NASA)抓总研制,于2013年发射升空,其主要任务是通过模块化堆垛式系统设计完成探测器地面研制,实现对月球轨道空间环境、月面环境、地月拉格朗日点空间环境及火星轨道的相关探测,系统总质量约880 kg[27]。LADEE 采用了埃姆斯研究中心在2006-2008年提出的“模块化通用航天器平台”,这是一种小型的、低成本的航天器平台,可携带各种有效载荷,平台模块包括以下几个子模块:①散热器模块,携带电子设备、电子系统、姿态敏感器和有效载荷;②平台模块;③有效载荷模块,携带2种有效载荷;④扩展模块,装有推进系统;⑤推进模块,如图1所示。该模块化平台不仅可用于多种探测任务,还可同时进行各部件的研制和组装。其系统级组件都来自低成本的、经过飞行验证的产品线[28]。应用适应性调变与编码(Adaptive Modulation and Coding,AMC)技术的模块化月球着陆器由NASA 的Ames 研究中心提出,旨在通过模块化系统设计对月表环境进行探测[10]。航天器模块化设计的最大优点在于可以实现并行研制,尤其是通过地面总装集成与测试(Assembly Integrated Test,AIT)等不同阶段各模块独立研制与测试等,缩短了研制周期、降低了研制成本。对于面向在轨扩展及接受服务功能需求,模块化设计是该类航天器系统的最基本特征。此外,德国宇航中心(Deutsches Zentrum für Luft- und Raumfahrt,DLR)提出的 ROBEX-ASN-Lander 同样也应用到了模块化设计技术[29-31]。
1.2 模块化大型深空探测器
模块化深空探测器主要是对系统进行模块划分,实现系统在轨组装构建和在轨接受服务。以NASA提出的Notional Mission项目的第5项任务为例[12],配置了人机协作服务飞行器、Orion 猎户座载人飞船以及服务平台等模块化子系统,实现了在大椭圆轨道对口径为Φ9.2 m 的ATLAST 先进技术大孔径太空望远镜(Advanced Technology Large-Aperture Space Telescope,ATLAST)望远镜系统进行组装构建,并通过上述模块化服务子系统借助人机协作对望远镜系统在生命周期内实施了多达17 次的在轨服务。为便于在轨服务任务实施,服务飞行器按计划将预先部署在以EML1为中心的李雅普诺夫轨道。
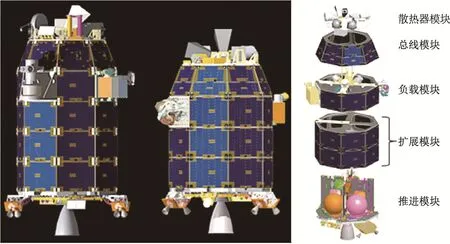
图1 月球环境探测器LADEE[29]Fig.1 Lunar environment probe LADEE[29]
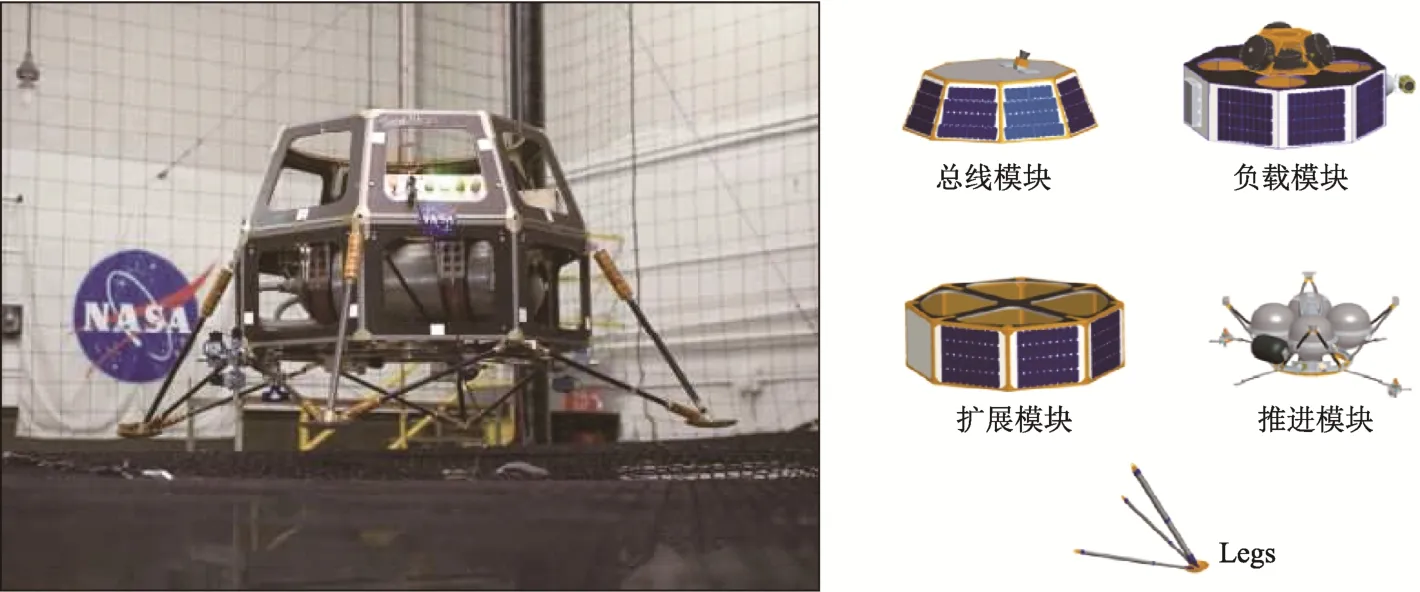
图2 应用AMC平台技术的模块化月球着陆器[10]Fig.2 Modular lunar lander applying AMC platform technology[10]

图3 深空关口站Gateway[23]Fig.3 Deep air gateway station Gateway[23]
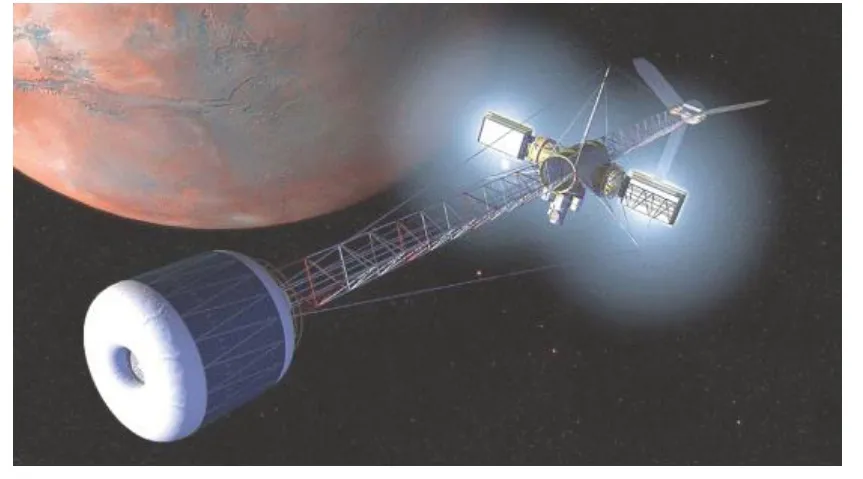
图4 火星探测转移飞行器[32]Fig.4 Mars exploration transfer vehicle[32]
1.3 超大型空间望远镜
对于空间望远镜系统任务,哈勃太空望远镜以其Φ2.4 m 口径的光学系统为人类认识宇宙提供了极为丰富的数据支撑,其他典型的空间望远镜系统任务还包括钱德拉X射线望远镜、斯皮策空间望远镜、伽马射线大型空间望远镜、MOST(Microvariability and Oscillations of Stars Telescope)、SOLAR-B 等,同时还包括在研的口径为Φ6.5 m 的詹姆斯韦伯空间望远镜等。应用在轨组装与维护技术,超大型空间望远镜系统在轨构建与空间观测任务实施将不断得以推进,国外典型的项目包括NNGST(Next Generation Space Telescope)、 MAST (Multi-Application Survivable Tether)、 TMST (Thirty Meter Space Telescope)、MUST(Modular Assembled Space Telescope)、EST(Evolvable Space Telescope)、RAMST(Robotically Assembled, Modular Space Telescope) 等[8]。 以RAMST为例,项目由NASA喷气推进试验室于2016年提出,系统采用模块化设计和机器人在轨组装技术,望远镜系统口径可达到Φ100 m[18]。系统各模块首先将通过多次运载发射在近地轨道借助机器人系统完成自主组装,最后再转移至SEL2 轨道实施空间探测任务。按照方案规划,望远镜系统将分成264个子模块,其中每个模块包括19 个主镜单元。通过文献调研分析,可将模块化超大型空间望远镜组装构建分为3 大类,包括人机协作组装、机器人完全自主组装、借助太阳帆等新型航天器实现在轨模块组装等[6]。
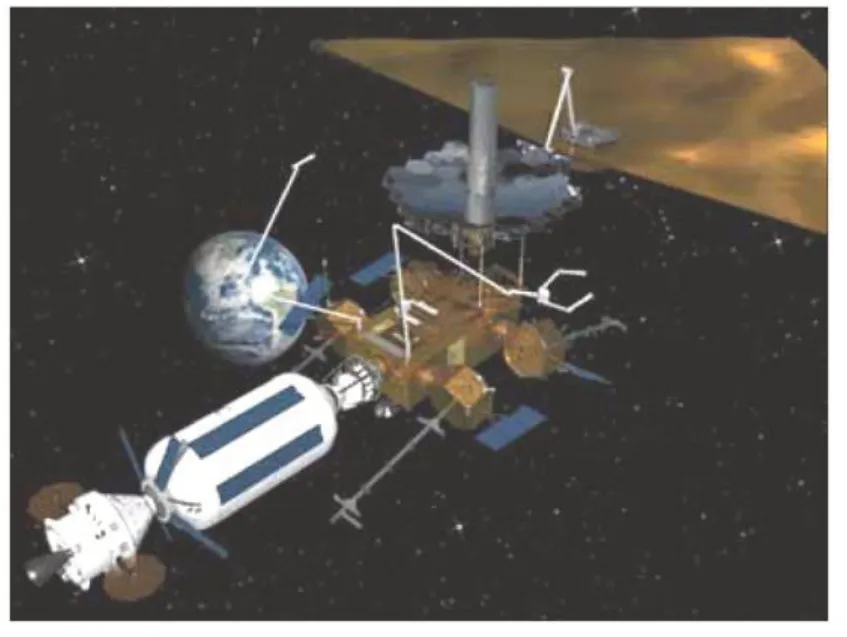
图5 ATLAST望远镜在轨组装与维护[12]Fig.5 On-orbit assembly and maintenance of ATLAST [12]

图6 超大型空间望远镜RAMST在轨构建[33]Fig.6 On-orbit construction of ultra-large space telescope RAMST[33]
1.4 新型大型深空探测器
国外自2000年以后相继提出了多项新型深空探测器,比较典型的任务包括深空关口站Gateway、DTT(Deep Space Transport)火星探测器、面向火星探测任务的转移飞行器,以及地外星体表面探测设施的模块化构建和原位资源建造等[8]。以深空关口站Gateway为例[30],NASA最早于2002年提出系统方案设想,近年来又陆续推出新的系统方案[31],比如2018年最新提出的基于DTT 系统的新方案等,按计划将部署于地月L1 或L2 点,总质量将达到30.5 t。系统主要组成部分包括充气式载人居住舱、外部配置有3 套对接接口的气闸舱、服务子系统、大型圆形电池阵以及机器人操作系统等,可作为大型深空探测器系统和超大型空间望远镜系统在轨组装与构建,尤其是载人火星探测等提供关键的在轨支撑服务平台。
1.5 其它
除上述任务外,国外文献报导包括NOW(New World Observer)、SPIRIT、ATLAST(含3种子任务)等项目尽管不会通过在轨组装实现系统构建,但考虑到长期在轨探测实施,系统在方案设计时通过特殊考虑以满足未来潜在的在轨接受服务的任务需求,包括主载荷、易损已坏部件的模块化设计、在轨操控接口配置等[8]。
2 关键技术要素分析
通过对国外深空探测领域基于系统模块化设计、在轨组装维护的相关项目的调研与分析,可以看出,实施新型深空探测器系统研制须在以下方面进行重点关注。
1)系统顶层任务规划
主要包括系统探测目标确立、主载荷配置、探测器系统规模、组装策略等。对于在轨组装系统,尤其须关注组装轨道选定以及构建完成后至探测任务最终实施前的转移轨道设计。对于系统接受在轨服务,还需考虑服务飞行器系统配置,以及在轨任务期间的具体服务实施策略等。
2)系统模块化设计
系统模块化设计除可实现在轨组装与接受在轨服务等诸多优点之外,其低成本设计须重点关注。这是因为模块化设计无论是在结构和机构等支撑系统,还是在载荷、信息与能源等相关系统拆分与模块独立设计等方面,均将带来大量的成本增加。
3)机器人在轨操控技术
国外在轨服务航天器领域多达百余项的任务报道中,仅国际空间站组装构建、哈勃太空望远镜在轨5次服务最为成功,其中的模块组装与更换等具体任务实施则是完全依赖于航天员在轨操作。因此可以看出,机器人在轨操控技术仍将是未来包括深空探测在内的新型航天技术发展的主要技术瓶颈。
4)地面模拟验证
对于常规尺寸的探测器,地面模拟验证技术已较为成熟,但对于大尺寸探测器系统尤其是超大型空间望远镜等典型系统的地面模拟验证,包括组装操控验证、载荷性能检测、整个探测器系统的性能验证等,将是未来新型深空探测器发展需要突破的关键技术之一。
3 火星多任务探测器设想
3.1 系统概况
火星多任务探测器系统如图7所示,利用机器人在轨组装技术,通过低成本运载火箭将不同功能模块发射至近地轨道完成整个探测器系统在轨组装,组装后系统质量达到10 t级。
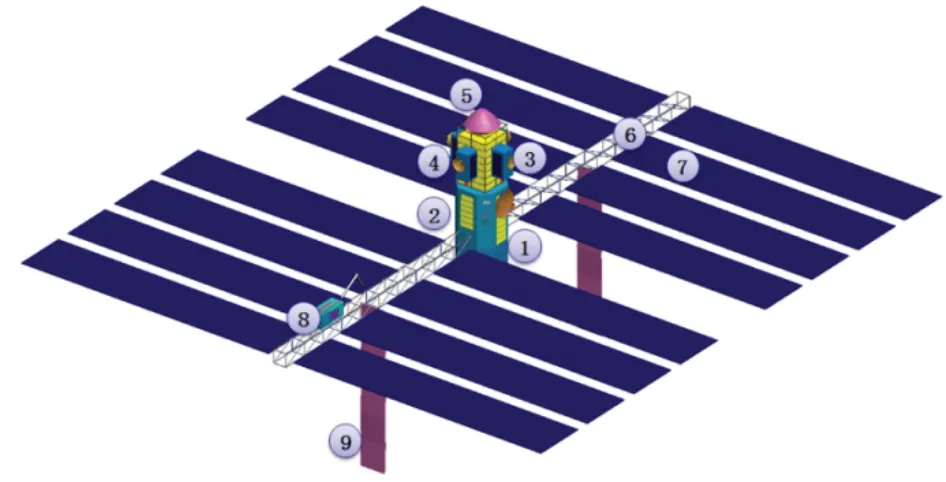
图7 火星多任务探测器系统设想(在轨组装后状态)Fig.7 Mars multi-mission probe system scenario(post-orbital assembly status)
3.2 任务架构
探测器飞行程序如图8所示,按照系统各功能模块划分或根据运载状态进行模块组合,通过运载火箭逐次发射至近地轨道并完成在轨自主组装。经过地球逃逸、地火转移和火星捕获3个阶段飞行,探测器系统经过近400 d 到达环火椭圆轨道。按照预定飞行程序,在到达近火点前择机完成系统分离。分离后将进入3类子探测器任务模式,分别包括M1-主体探测器模式、M2-进入器模式、M3-分布式环火小型探测器模式。3类任务模式相结合可实现火星轨道不同高度范围的空间环境、火星大气及火星表面的综合探测目标。需要指出的是,由于探测器系统配置有可移动智能机器人,同时在多功能扩展构架模块上配置了多个设备在轨可更换ORU 模块,因此可根据任务需要实现自主在轨维护。
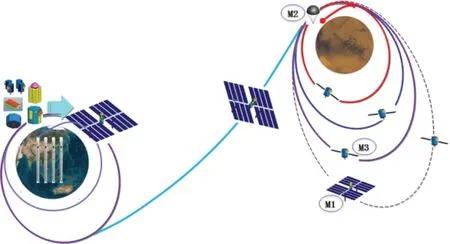
图8 火星多任务探测器飞行程序示意Fig.8 Flight program of Mars multi-mission explorer
3.3 推进系统选型及轨道策略
关于火星多任务探测器系统的推进系统选型以及轨道设计,以10 t系统为例,通过对比分析应用纯化学推进、电推进、化推与电推组合式,可以看出同样在500 km 地球轨道完成逃逸时间以及推进剂占比有较大差异——3 类推进系统质量占比分别为69.90%、13.23%、63.29%。分析表明,若采用比冲为5 000 s的300 kW 电推力器,逃逸地球需推力器工作长达75 d,在此状态下,从500 km 近地轨道(Low Earth Orbit,LEO)轨道逃逸,至被火星捕获并到达目标环火轨道,总的飞行时间约406 d,总的燃料消耗占比29.46%。

图9 10 t 级火星多任务探测器应用不同推进系统完成地球逃逸的轨道策略对比Fig.9 Comparison of orbital strategies for earth escape with different propulsion systems for the 10 t Mars multi-mission probe
为缩短探测器逃逸时间和减小推进剂消耗,可以通过增大推力器功率,从而增大发动机推力和比冲实现。例如,采用比冲为8 000 s 的10 MW 推力器,地球逃逸时间可缩短为仅40 天,燃料消耗占比减小至8.82%。因此,为实现长周期、火星多任务探测,采用小推力的电推进系统为首选方案,而系统相应所需配置的大面积电池阵系统则可通过在轨组装予以实现,这与国外最新提出的大型火星探测系统的推进方案设想一致[33,35-36]。
3.4 系统特点分析
对于火星多任务探测器系统,其相比于传统深空探测器有如下突出特点,包括通过多次运载发射、系统包含多个任务模块、由于采用高功率的电推进系统导致系统配置超大面积电池阵、多个可独立飞行的子探测器、系统通过在轨组装实现组合体构建、系统配置有可移动智能机器人、系统可在轨实施自主维护等;另一方面,为实现系统上述功能及探测任务目标,除深空探测器所需的基本技术如远距离测控通信以及在轨组装所优选的低成本运载系统以外,火星多任务探测器系统需要在多个关键技术领域进行重点攻关,主要包括模块化航天器系统、智能操控机器人、先进电推进系统、相对导航与在轨完全自主交会对接、超大型系统动力学与控制等。
4 结论及建议
本文首先调研回顾了国外深空探测领域应用模块化设计、在轨组装维护的技术进展,对典型深空探测器系统状态及技术特点进行了概括介绍,分析了发展基于在轨组装维护的模块化深空探测器的关键技术要素,并提出了一种火星多任务探测器系统设想,介绍了系统基本组成、任务架构及轨道策略等。通过分析研究,有以下结论及建议。
1)国外在应用模块化设计、在轨组装维护的深空探测器领域已有较好的技术基础,通过具体分析研究,可为我国开拓深空探测新任务提供参考。
2)发展基于在轨组装维护的模块化深空探测器,需要重点在系统顶层任务规划、系统模块化设计、机器人在轨操控技术与地面模拟验证等方面实施关键技术攻关。
3)提出的火星多任务探测器系统初步方案表明,利用系统模块化设计、在轨组装与维护,可以实现火星轨道空间、火星表面的长期、多任务探测。应用不同推进系统的轨道策略分析显示,对于未来大型复杂深空探测器系统,在入轨周期允许条件下,电推进为优选推进方案。
4)发展大型复杂深空探测器系统涉及多项技术瓶颈,国内应加大力度,联合科研院所及高校甚至国外科研单位的优势力量,协同攻关,尽早制定发展规划并开展先期关键技术研究。
猜你喜欢
国际太空(2022年7期)2022-08-16 09:52:50
中学生数理化·八年级物理人教版(2022年11期)2022-02-14 06:37:40
国际太空(2019年9期)2019-10-23 01:55:34
中国生物医学工程学报(2019年6期)2019-07-16 07:52:40
中学生数理化·八年级物理人教版(2018年11期)2019-01-31 02:40:08
国际太空(2018年12期)2019-01-28 12:53:20
国际太空(2018年9期)2018-10-18 08:51:32
小哥白尼(趣味科学)(2018年6期)2018-09-14 06:10:58
摄影之友(影像视觉)(2017年12期)2017-02-08 02:10:02
自动化学报(2016年3期)2016-08-23 12:02:56