
双电动机电伺服同步驱动实验系统设计
2019-03-19 13:12倪敬,任旭,蒙臻
实验技术与管理 2019年2期
倪 敬, 任 旭, 蒙 臻
(杭州电子科技大学 机械工程学院, 浙江 杭州 310018)
创新是一个国家的核心竞争力之一,作为国家科研力量的后备军,大学生的创新能力就显得尤为重要[1]。机电结合的实验教学环节对于工科类的学生尤其是机械专业的学生创新能力的培养起着不可忽视的作用。然而目前教学以及科研方面的培训上都存在着实验教学平台学科关联度低、专业性差、实验锻炼目的难以实现的问题[2-3],起不到培养学生深度创新能力的目的。本文针对深入培养大学生创新能力的需要,结合同步驱动与电伺服驱动[4-6]在现代机电一体化技术中的高端应用,创新设计了一种基于工业PLC的双电动机电伺服同步驱动教学实验系统。该设计以工业PLC自动控制技术为基础[7-8],结合精密检测传感技术[9-10]与机电传动控制相关[11-12]等方面的知识,最终实现以机械相关知识为基础,多学科综合性联合实验教学目的。同步控制理论、闭环控制理论、单通道电伺服控制实验和双电伺服同步驱动实验部分的加入,实现了自动化控制理论、机电一体化技术和同步驱动理论有机结合。该教学实验系统更加自动化和精细化,具备了创新性和进阶性,可以极大地锻炼学生思考、尝试和努力解决实际工程问题的能力,从而达到学生自主创新实践能力的培养要求。
1 实验系统工作原理与性能指标
1.1 实验系统工作原理
实验系统的整体架构如图1所示,主要由2件单电动机电伺服驱动机构、同步溜板滑台、模拟刀具、带孔工件、底座和PLC电气控制柜构成。
实验台的具体工作原理如下所述:
(1) 单电动机电伺服驱动系统工作原理如图2所示,首先PLC控制器的高速输出端向伺服驱动器发送指令脉冲;然后伺服驱动器根据脉冲的频率和数量,驱动伺服电动机旋转对应的位移;同时伺服电动机后端自带的编码器可以对输出的位移反馈至伺服驱动器,以实现电动机的精确定位,这是伺服电动机自己的内闭环控制机构。此外,在每一丝杆另一端增设旋转编码器,可以获得滑台更高精度的位置,因为伺服电动机的输出轴经过联轴节后,会存在一定的传动误差。这种经过丝杆编码器进行位置反馈精确定位的方式就是伺服电机的外闭环控制。

图1 实验系统总体结构示意图
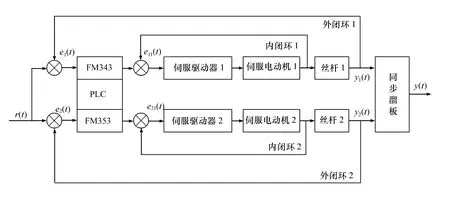
图2 双电动机电伺服驱动系统控制原理图
(2) 双电动机电伺服同步驱动系统工作原理见图2,首先在每一个控制周期内,必须要以丝杆1位置y1(t)为基准,计算同步误差eS(t)=y2(t)-y1(t)=e2(t)-e1(t),一旦同步误差|eS(t)|≥em(em为一设定值)时,系统驱动将强制停止,以保证驱动过程的安全;然后,采用“等同式”同步控制策略,PLC控制器的2件高速输出端分别向2件伺服驱动器发送同一指令脉冲;接着,2件伺服驱动器根据各自收到的脉冲频率和数量,驱动2件伺服电动机,旋转对应的位移;同时,2件伺服电动机后端自带的编码器将各自向对应的伺服驱动器反馈位置;此外,2件丝杆编码器将滑台位置反馈至PLC控制器,以实现系统同步驱动的性能评价和控制参数调整。这就是“等同式”同步控制方法。
1.2 实验系统的具体性能指标
本文设计的实验系统的主要性能指标如下:
(1) 额定负载:50 kg;
(2) 同步驱动行程:0~600 mm;
(3) 同步驱动速度最大速度:300 mm/s;
(4) 加减速时间:0.5~5 s;
(5) 单电动机驱动机构稳态位移误差:≤0.02 mm;
(6) 双电动机驱动机构同步位移误差:≤0.1 mm。
2 实验系统电伺服驱动机构应用设计
单电动机电伺服驱动机构,即电伺服驱动丝杆滑台,是本实验台的核心部件,是在普通电动机丝杆滑台的基础上,附加增量式光电旋转编码器构成。详细的电伺服驱动丝杆滑机构结构见图3。各元件的相关参数见表1。滑台与4件滑块和驱动丝母固定。这样,伺服电动机通过联轴器1驱动丝杆旋转,从而带动滑台实现直线运动。此外,旋转编码器安装在丝杆轴的另一端,与丝杆通过联轴器1相连接,以实现对滑台实际位移的测量。

图3 单电动机电伺服驱动机构结构示意图

元件名称型号主要性能伺服电动机EMCA-C2060460框架,400 W丝杆丝母1 605行程800 mm直线滑块HGH30CA载荷100 kg直线滑轨MGW12长度1 000 mm光电编码器E6B2-CWZ6C增量式,1 000 p/r联轴器1SRJ-C48-L70连接丝杆与电动机联轴器2TYPICAL-10-14连接丝杆与编码器
3 实验系统电气控制设计
3.1 电气系统设计
3.1.1 实验系统配电原理设计
根据实验系统工作要求,系统的配电系统如图4所示,主要由2件伺服电动机供电回路和开关电源相关供电回路组成。伺服电动机供电回路主要向2件伺服驱动器供电。开关电源供电回路主要为PLC电源模块、数字输入模块、数字输出模块与上位监测计算机供电。系统配电设计主要体现实验系统的总功率消耗和主要用电器分布。

图4 实验配电系统原理
3.1.2 伺服电动机的控制回路设计
实验系统主要机电驱动元件由两件伺服电动机构成。每一台伺服电动机的控制回路如图5所示,由强电和弱电回路组成。强电回路经由空气开关QF1连接伺服驱动器R、S、T端子,伺服驱动器输出U、V、W端子连接伺服电动机绕组,主要负责伺服电动机电流放大驱动。弱电回路主要由控制供电回路、编码器回路和控制信号回路组成。其中,伺服驱动器供电回路由空气开关QF2连接伺服驱动器L1C和L2C端子实现;编码器回路由伺服驱动器CN2接口与伺服电机的编码器连接而成;控制回路由伺服驱动器通过CN1接口与PLC的FM353定位模块连接而成,主要完成控制脉冲,以及电动机方向和使能信号的传输。
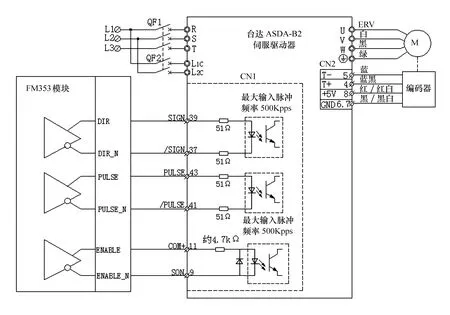
图5 伺服电动机的控制回路原理图
3.1.3 PLC系统硬件设计
实验系统涉及的信号通信原理如图6所示,主要由上位工控机、CP5611卡、PLC控制器,2件单轴伺服驱动器、2件伺服电动机和2件旋转编码器组成。PLC系统配置见表2。

图6 实验系统通信原理图
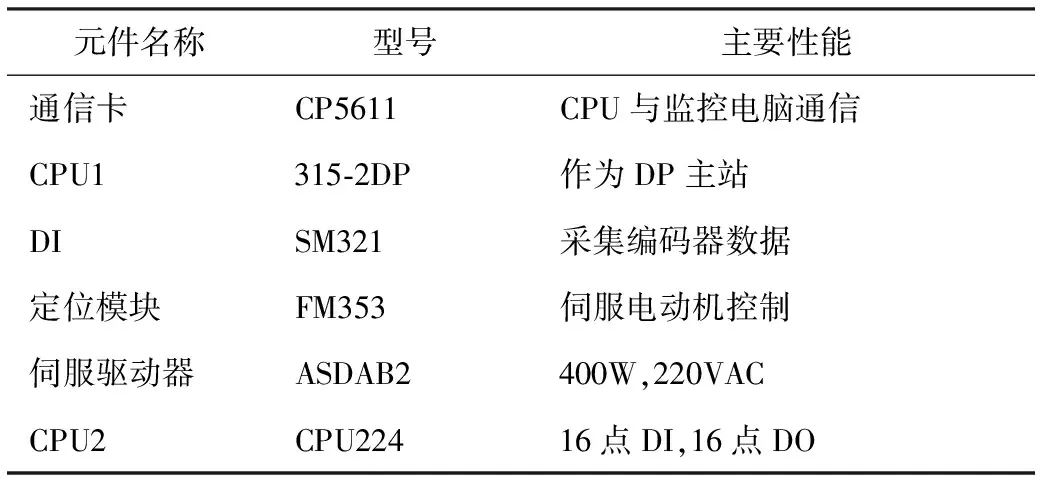
元件名称型号主要性能通信卡CP5611CPU与监控电脑通信CPU1315-2DP作为DP主站DISM321采集编码器数据定位模块FM353伺服电动机控制伺服驱动器ASDAB2400W,220VACCPU2CPU22416点DI,16点DO
PLC系统的具体通信过程描述:上位监控计算机通过CP5611卡与PLC系统的CPU315-2DP进行通信,完成驱动位置实时数据的采集;PLC系统的CPU315-2DP通过FM353脉冲发生模块与2件单轴伺服驱动器接口CN1通信,实现脉冲控制信号的传达;单轴伺服驱动器通过其位置接口CN2与伺服电动机编码器进行通信,反馈相应的位置。CPU315-2DP作为主站通过Profibus- DP总线与从站CPU224通信,以完成相关的数字量控制工作;CPU315-2DP通过CP5611通信卡实现与上位监控计算机通信,实现控制程序下载和系统驱动过程数据交流。
3.2 PLC控制软件设计
基于西门子S7-300PLC编程STEP7软件平台,根据实验系统的工作原理,双电动机电伺服同步驱动过程PLC程序原理如图7所示。该控制软件主要由主程序OB1块和定时中断OB35块组成。

图7 实验系统PLC程序原理图
主程序OB1模块主要可以分为单电动机驱动控制和双电动机同步驱动控制两大部分,其核心是2个伺服电动机各自的功能模块FB1和FB2。在单电动机驱动工况下,由FB1块(背景数据块DB11)和FB2块(背景数据块DB12)构成点动控制模式,完成单个电动机的点动运行参数设置和运行控制;由FB1块(背景数据块DB21)和FB2块(背景数据块DB22)构成分段控制模式,完成单个电动机的固定距离分段运行参数设置和运行控制。在双电动机驱动工况下,由FB1块(背景数据块DB31)和FB2块(背景数据块DB32)构成点动控制模式,完成双电动机的点动同步运行参数设置和运行控制;由FB1块(背景数据块DB41)和FB2块(背景数据块DB42)构成分段控制模式,完成双电动机的固定距离分段同步运行参数设置和运行控制。
定时中断OB35模块是同步控制关键模块,提供1~10 ms的定时中断。功能块FB4(背景数据块DB4)用于记录双电动机同步驱动过程中2个丝杆的位移数据,供监控系统查询、绘制实验结果和同步性能评价。此外,还有丝杆位置读取和同步误差判断报警模块,主要是对eS(t)的处理和系统安全保护。
3.3 监控软件系统设计
利用Borland C++ builder 6软件编程程序,根据实验系统的工作原理,双电动机电伺服同步驱动过程的监控软件界面如图7所示。该监控软件,主要有通信设置模块、单电动机调试模块和双电动机调试模块模块。
PLC通信设置模块基于CP5611通信卡和通信动态连接库函数,主要用于测试PLC与上位工控机的通信连接,将控制程序下载到PLC和读取PLC采样的数据等功能。
单电动机调试模块主要用于测试2个单电动机电伺服驱动机构的“点动回零”“点动运行”和“区间定位”操作,可实现初始位置读取、目标位置设定、指令曲线(加速度和速度)调整、速度曲线和定位误差作图与评价等功能。
双电动机调试模块的监控界面如图8所示,主要用于测试双电动机电伺服同步驱动机构“点动回零”“点动运行”和“区间定位”操作,生成同步驱动指令位置曲线(加速度和速度),以及控制参数调整、速度曲线和同步误差作图与评价等功能。

图8 双电动机电伺服同步驱动系统监控界面
4 实验设计
实际双电动机电伺服同步驱动教学实验系统实物见图9,占地仅有2.5 m2,根据其组成与特点,可以安排如下的基础型和进阶型教学实验:
(1) 机电传动控制实验。本实验属于基础型实验,通过对伺服电动机点动的控制,认识基础电气控制元器件,例如开关电源、熔断器、电磁继电器、空气开关,以及最为基础的电气连接附件。应用机电传动技术知识绘制伺服电动机控制回路图,让学生理论与实际操作相结合,提高学生实际工程能力。
(2) 伺服电动机PLC编程控制实验。本实验属于基础型实验,通过使用西门子PLC编程软件STEP7,设计编写实现单伺服驱动机构精密定位的程序,并进行相关的实验验证。这类实验可以培养学生的实际编程能力和逻辑思维能力,领悟PLC独特的编程思想和执行过程。

图9 双电动机电伺服同步驱动系统实物图
(3) 光电旋转编码器实验。本实验属于基础型实验,通过对不同位移量下的旋转编码器输出信号的直观观测,了解旋转编码器的工作原理与检测方式,使学生对高精密检测技术有较为详细的了解。
(4) 精密传动实验。本实验属于进阶型实验,通过“内闭环”和“外闭环”控制下滑台定位位置误差以及“回零”位置误差的观测,让学生理解机电传动过程中误差的产生原理和精密传动的原理。
(5) Profibus-DP总线实验。本实验属于进阶型实验,通过S7-300PLC作为通信主站,实现与作为从站的S7-200PLC的组态通信,加深学生对现场总线技术编址和控制信息传输原理的理解,体会总线通信与现场总线控制技术的便捷与创新性。
(6) 双电动机电伺服同步驱动实验。本实验属于高阶型实验,通过对双电动机电伺服同步驱动控制算法结构框图的理解,根据同步性能评价,自行编写双电动机控制、控制参数调整和报警处理程序,并进行相应的控制实验,深入体会影响同步驱动误差和同步驱动速度的因素,极大地挑战学生的创新实践能力。
5 结语
本文提出的双电动机电伺服同步驱动系统与一般教学实验设备性能相比,具有结构紧凑和机电一体化技术集成度高的特点,同时还具有以下几个方面的特色与创新之处:
(1) 实验系统配置了同步控制技术、闭环控制技术、电伺服驱动技术、位移传感技术、机电传动控制技术、现场总线技术和PLC控制技术,能有效地满足不同高等院校机械和自动化学科多专业的基础型单项教学实验任务。
(2) 实验系统集电伺服驱动机构、电气元件、PLC硬件、PLC控制软件和上位监控软件与一体,功能完备,并且实训参数和难易程度可以根据教学目标设定、调整,能有效满足大学生进阶型培养所需的实验设备要求。
(3) 实验系统融合同步控制理论、闭环控制算法、高精度位移传感器和现场总线技术,充分体现了现代机电一体化设备与控制技术水平,保证了教学实验系统的先进性与创新性。
猜你喜欢
橡塑技术与装备(2022年10期)2022-10-03
网络安全与数据管理(2022年1期)2022-08-29
有色金属材料与工程(2021年4期)2021-11-27
北华大学学报(自然科学版)(2021年3期)2021-07-13
装备维修技术(2020年4期)2020-11-23
电脑爱好者(2020年6期)2020-05-26
制造技术与机床(2017年7期)2018-01-19
北京航空航天大学学报(2017年5期)2017-11-23
西安工程大学学报(2016年6期)2017-01-15
探测与控制学报(2015年4期)2015-12-15
