
基于T-S模糊神经网络自动换挡策略研究
2019-03-18 06:50张小虎王立勇唐长亮
北京信息科技大学学报(自然科学版) 2019年1期
张小虎,王立勇,唐长亮
(1.北京信息科技大学 机电工程学院,北京 100192;2.北京信息科技大学 现代测控技术教育部重点实验室,北京 100192)
0 引言
车辆自动变速器的关键技术是我国车辆发展的重要因素。车辆的动力性、经济性以及乘坐的舒适性不仅取决于发动机的优劣,而且与变速器的性能也有很大的关系[1-3]。目前自动变速器主要分为5类:液力机械式自动变速器(AT)、无极变速器(CVT)、双离合式自动变速器(DCT)、无级变速机械式自动变速器(IVT)和电控机械式自动变速器(AMT)。AT是由液力变矩器和变速器组合而成,液力变矩器的应用减小了换挡过程震动,提高了车辆的乘坐舒适性[4];CVT变速比是连续值,有良好的经济性与平顺性;DCT具有2个离合器,在换挡过程中,一个离合器断开,另一个离合器啮合,2个离合器依次使用,没有动力间断现象;IVT是由变速器和行星排构成,可以承受大的载荷;AMT是对传统手动变速器加以改进,加上自动变速系统,具有传动效率高、结构紧凑、成本低等优点。
对自动换挡的研究主要集中在控制策略上。赵丁选等[5]对传统的BP神经网络进行了改进,改善了传统算法收敛速度慢等缺点;李平康等[6]将基于模糊规则递推调整算法应用在车辆自动换挡上,提高了车辆的动力性;易军等[7]采用参数自调整模糊控制方法,对不确定的车辆参数和外部负载扰动具有很好的鲁棒性;陈清洪等[8]提出了动态模糊神经网络算法,与两参数相比三参数输入鲁棒性更强。有些学者也对一些特殊工况下的控制策略进行了研究,例如下坡时换挡策略的研究[9]。但是,国内对自动换挡策略的研究,比较常用的控制算法主要有神经网络算法和模糊算法,集成两者优点的换挡策略研究较少。将T-S模糊神经网络应用到自动换挡上,结合了模糊算法与神经网络算法,模型可用少量的模糊规则生成较复杂的非线性函数,对于自动换挡研究具有一定的应用价值和指导意义。
1 T-S模糊神经网络换挡原理
T-S模糊神经网络自动换挡原理如图1所示。首先采集车辆在不同的油门开度以及行驶车速下对应的档位值,将采集的车速、油门开度以及对应的档位作为训练样本,用提取的样本对训练模型进行训练,将训练好的模型放到换挡控制器中,当油门开度和车速信号输入到训练好的T-S模糊神经网络中,经过模糊神经网络算法,输出档位信号,档位信号驱动变速器换挡。

图1 T-S模糊神经网络自动换挡原理
2 建立T-S模糊神经网络模型
神经网络算法具有并行计算、分布式信息存储以及自学习等一系列优点,类似于人脑的学习、记忆和分析等功能;模糊控制算法模拟人脑的思维方式,以模糊推理的方式处理日常难以解决的问题。模糊控制算法主要是从宏观出发,研究模糊性的问题;神经网络主要从微观出发,模拟神经元的工作方式。T-S模糊神经网络继承了两者的优点,并成为处理非线性系统的有力工具[10-12]。
目前有2种模糊神经网络应用最为广泛,这2种模糊神经网络的区别是基于2种不同的模糊推理,一种是基于标准模型(Mamdani)的模糊神经网络,另外一种是基于T-S模型的模糊神经网络。2种模糊推理各有优缺点:Mamdani模糊推理输出量仍然是模糊量,更加符合人类的思维方式和语言表达习惯;T-S模糊推理输出是输入变量的线型组合。与Mamdani模糊推理相比,T-S模糊推理不仅效率高,而且能够更好地与线型理论配合,适合数学分析[13-14]。
2.1 T-S模糊神经网络结构
如图2所示,T-S模糊神经网络主要分为前件网络和后件网络,均有4层节点。前件网络A、C层有2个节点,B层有4个节点,D层有1个输出节点;后件网络 A、B和C层均有2个节点,D层有1个输出节点。

图2 T-S模糊神经网络结构
前件网络的A层为油门开度a和车速v的归一化结果,B层为模糊层,隶属度函数采用高斯函数。
(1)

前件网络C层输出为
(2)
前件网络D层输出为
(3)
后件网络的A层输出同样为油门开度a和车速v的归一化结果。
B层输出为
(4)

C层输出为
(5)
D层输出为
(6)
模糊神经网络的最终输出为反归一化结果:
(7)
2.2 学习与训练算法
T-S模糊神经网络学习与训练算法原理如图3所示。用提取的样本对模型进行训练,训练后输出实际档位,实际档位与目标档位对比,如果误差在允许范围内,则训练结束,否则就用最速下降法进行搜索,反向计算出隶属度函数参数以及权值,重复前面工作。

图3 学习与训练算法原理
实际输出与目标输出的误差函数定义为
(8)

为了使输出逼近输出,需要使E的值最小,采用最速下降法进行搜索,搜索方法可以由式(9)表示:
(9)

从而可以得到3个参数的表达式为:
(10)
(11)
(12)
式中:α为学习速率;θ为动量因子。
3 仿真与结果
3.1 仿真过程
3.1.1 数据采集
AT自动变速器的换挡控制策略的制定主要有2种方法,一种是根据车辆相邻挡位驱动力曲线计算出换挡点,另一种方法是根据优秀驾驶员的驾驶习惯制定换挡曲线。
图4为某一款车辆换挡曲线图。在换挡曲线图中均匀提取15 200个数据点,用这些数据点模拟优秀驾驶员的驾驶习,将这些数据作为训练样本。

图4 换挡曲线图
换挡曲线一共5个档位,每个档位之间有交叉部分,这样就避免车辆在换挡点附近行驶时引起频繁换挡现象,一方面延长了变速器的使用寿命,另一方面增加了车辆的稳定性以及乘坐的舒适性。
在训练时把1档和2档之间的重叠区域定义为1.5档,同样2档和3档之间、3档和4档之间以及4档和5档之间的重叠区域分别定义为2.5档、3.5档以及4.5档。
3.1.2 训练模型
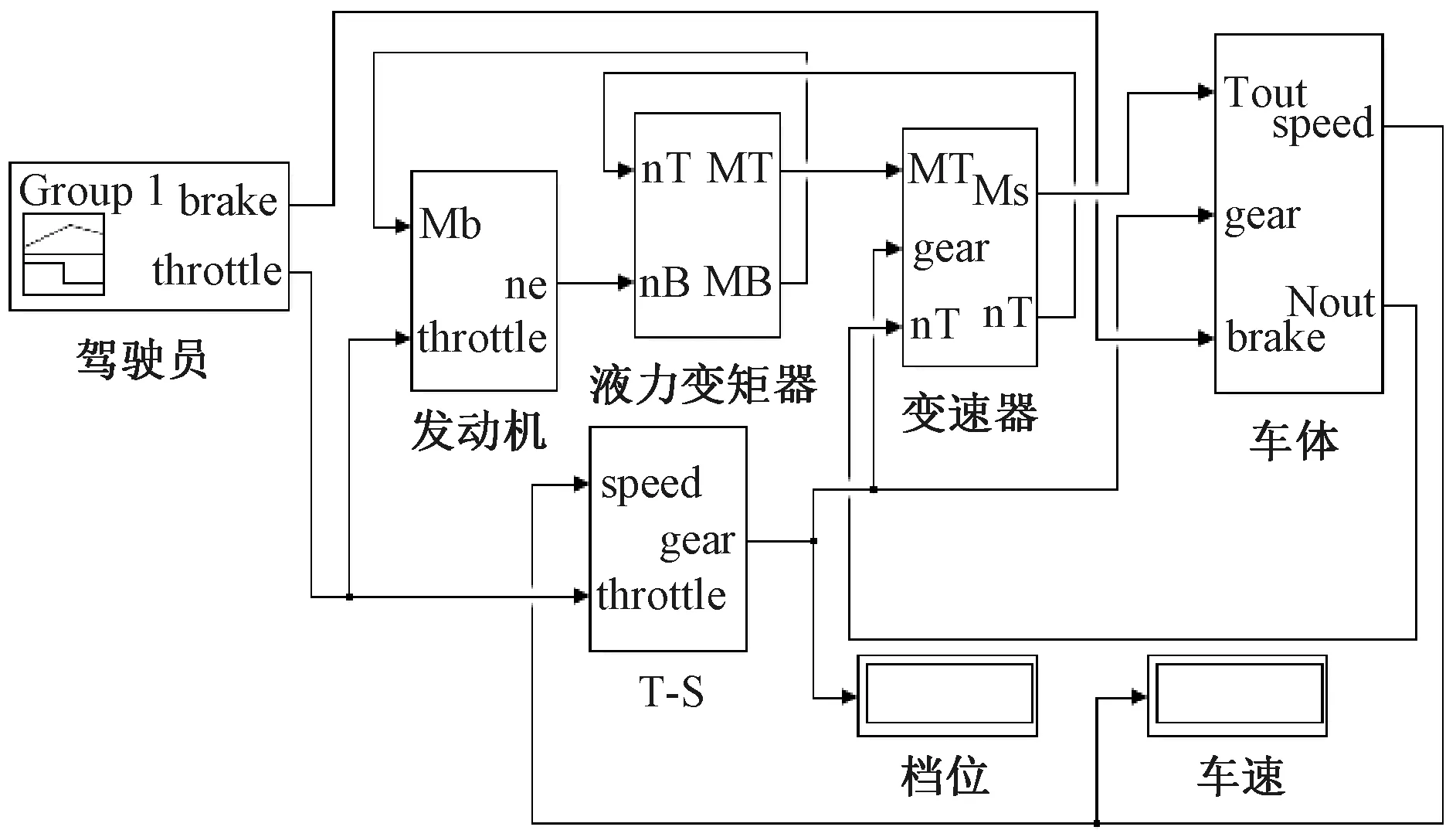
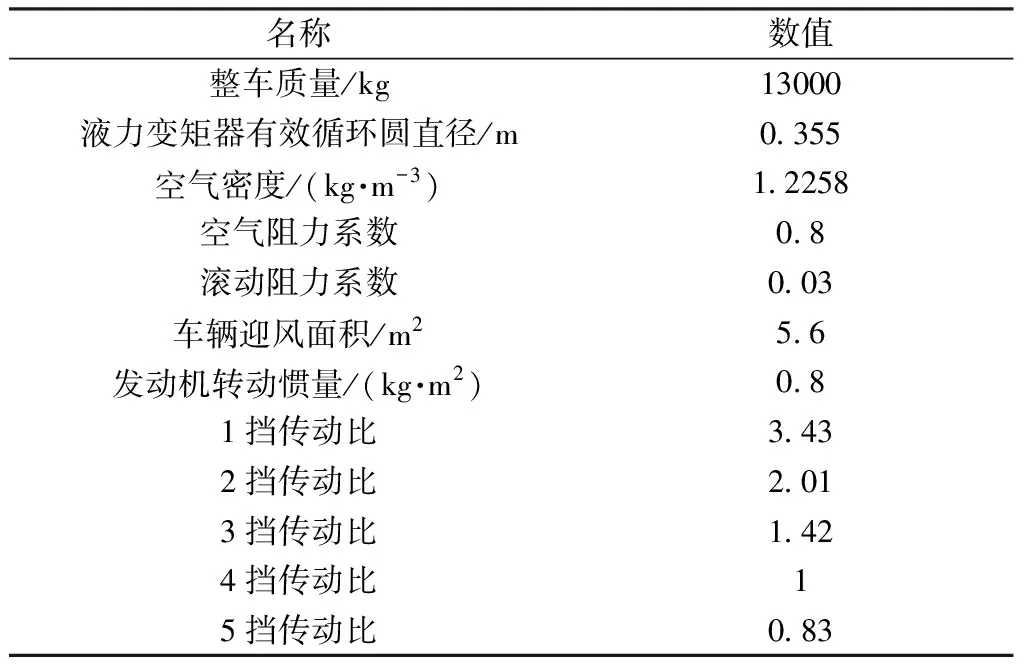
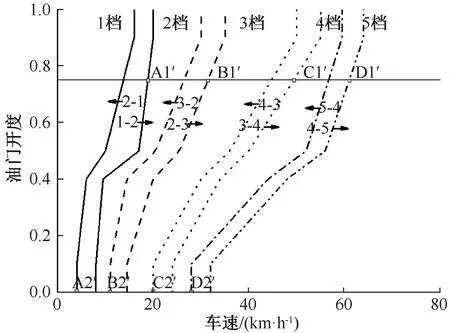
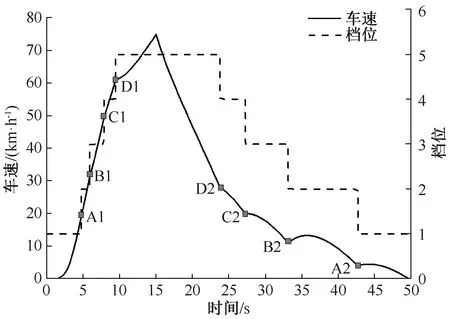
把采集到的数据点输入到控制算法中,训练出c、σ以及p三个参数的数值,同时也会得到训练后的实际档位值以及训练误差,如图5所示。训练过程中会有一定的误差,最大误差在10%以内。因为模型中有取整过程(比如当训练后的档位为n,当1.75 图5 实际输出与训练误差 3.1.3 搭建仿真模型 表2 理想、实际的档位与车速 仿真系统总体结构主要包括发动机模型、液力变矩器模型、变速器模型、车体模型以及控制算法模型。根据车辆关键部分的模型公式,在matlab/simulink中搭建仿真模型,如图6所示。 图6 matlab/simulink仿真模型 仿真所用参数如表1所示。 仿真过程有2个阶段:油门开度为70%时车辆加速过程;加速15 s后油门开度为0,刹车减速过程。图7是油门开度为0以及70%时理想换挡点,图8为实际的档位与车速曲线图。 表1 仿真参数设定 图7 理想换挡点 图8 实际速度与档位曲线图 通过对比图7与图8,整理出实际情况下以及理想情况下对应的车速和档位,如表2所示。从表2可以看出,在换挡点处实际车速和理想车速误差在2%以内,证明了运用的算法的可行性。 为了提高车辆的动力性以及乘坐的舒适性,本文将T-S模糊神经网络应用于自动换挡中。在matlab/simulink搭建仿真模型,在先加速后减速的工况下进行仿真,仿真结果表明换挡点误差在2%以内,满足换挡要求,证明了运用算法的可行性以及较强的鲁棒性。

3.2 仿真结果
4 结束语
猜你喜欢
科学与财富(2021年33期)2021-05-10
北京汽车(2021年2期)2021-05-07
发电技术(2020年3期)2020-06-29
汽车维修与保养(2019年1期)2019-05-05
汽车电器(2018年12期)2019-01-04
智富时代(2018年9期)2018-10-19
智富时代(2018年9期)2018-10-19
戏剧之家(2018年21期)2018-10-19
汽车维护与修理(2018年1期)2018-04-04
作文周刊·小学一年级版(2017年27期)2017-08-10
