
数字式微步进分度输液泵的设计*
2019-03-07 08:41宋宝亭朴顺梅王易诗于慧博裴丽艳李雪薇李文鑫
中国医学装备 2019年2期
宋宝亭 朴顺梅* 王易诗 于慧博 肖 红 裴丽艳 李雪薇 于 雷 李文鑫
随着医学技术的进步和科学的发展,以输液泵为代表的输注器械因其速度控制均匀,调速便捷[1]而逐渐应用于临床护理领域。同时,随着输液泵应用范围的扩展,对其设备的精度、患者体验、便携性、场景适应性以及安全性提出了更高的要求,不仅需要考虑患者在输液期间的舒适性和便携性,而且能够应用于野外、路途等特殊场景,使其能够提高患者输液期间的治疗体验,降低患者长期保持固定体位带来的不适感,克服了传统输液泵输注期间难以移动的缺点[1-2]。同时,增强输液泵在户外、灾害、急救等特殊条件下的适应性,使其具有操作便捷、运行稳定性强等优点,提高适用场景范围;还能够监测输注过程可能存在的异常情况。从而降低临床护理的工作强度,提高操作的精确性和安全性。
1 数字式微步进分度输液泵需求分析
数字式微步进分度输液泵应实现的功能包括:①输液速度精确控制,能够精确监控输液速度,根据测量值实现精确输液速度控制;②输液量测量,精确测量输液量,辅助实现自动化输液计划;③输液稳定性控制,提高输液过程线性度,降低脉动性;④异常状况监测,针对输液过程中可能出现的异常情况(如气泡、空液等)[3]状况进行报警,并控制输液通路;⑤输液任务控制,能够建立输液任务、选择性调节输液参数(输液速度、输液量以及输液时间)以及任务完成后反馈等功能;⑥便携及适应特性,输液泵应具有便携和小体积的特点,适用于患者小幅度运动及户外、灾害、急救[4]等多种使用场景。
2 数字式微步进分度输液泵设计
2.1 输液泵系统工作流程
当系统开始运行、用户完成参数设置后,驱动电机开始驱动输注,输注过程中由系统传感器检测滴速、空液、气泡、阻塞等输液管状态并显示状态信息,当存在异常状态时,发送停止信号暂停电机并发出报警信号[5](如图1所示)。
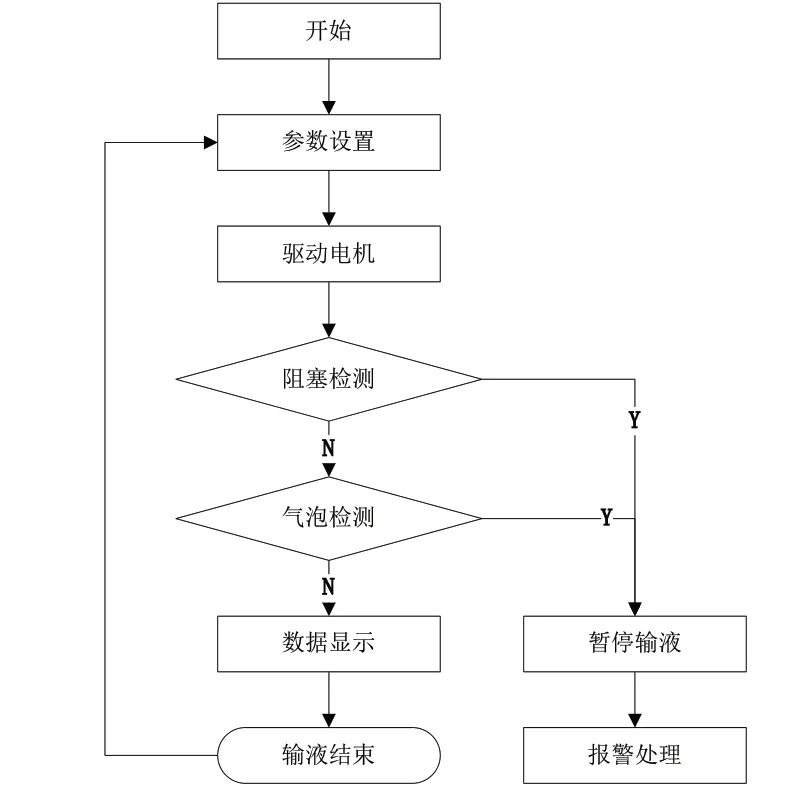
图1 数字式微步进分度输液泵系统运行流程图
2.2 输液泵系统组成
系统结构由输入输出模块、电机驱动、控制系统以及传感器电路组成[2,6]。当用户通过输入模块输入命令后,控制电路反馈用户请求。控制器根据用户请求控制步进电机,并结合电机传感器反馈转速信息,从而精确控制输注量和输注速度。系统采用微步进分度电机并针对输注过程中出现的空液、气泡等异常状况进行监测,并针对异常快速做出响应,保障医疗安全(如图2所示)。
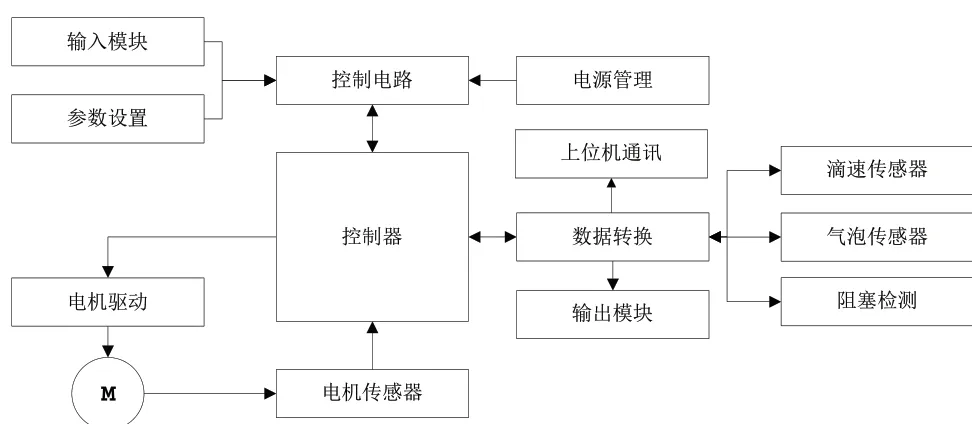
图2 数字式微步进分度输液泵系统结构图
2.2.1 控制器
控制器采用AT89S52单片机作为控制核心,该芯片是一种低功耗、高性能CMOS 8位微控制器,具有8 K系统可编程Flash存储器。片中Flash允许程序存储器在系统内编程,亦适于常规编程器。在单芯片上拥有灵巧的8位CPU和在系统可编程Flash,使得AT89S52在众多嵌入式控制应用系统中得到广泛应用[7]。
控制系统接收用户输入命令并完成参数设置后,输出控制信号控制电机执行启停、改变方向、速度控制、填充排空等;在执行输注任务过程中,控制系统接收阻塞、气泡及滴速传感器信号,实现状态信号输出及安全监测功能,当出现异常状况时,发出报警信号。
2.2.2 控制电路
系统通过控制电路实现输入模块信号处理,从而实现参数设置、电源控制信号输出、电源测量信号测量等功能。
2.2.3 微步进电机系统
电机驱动及控制系统组成包括电机、电机驱动器、减速机和光栅尺等。系统采用DG-1盘状蠕动泵作为执行元件,具有步进精度高、控制简单、惯量低、无累积误差等优点,广泛应用于医疗设备系统设计中[8-10]。输液泵具有启停控制、方向控制、精确速度控制、掉电记忆及填充排空等功能,能够满足系统设计的要求[11]。
输液速度及输液量控制可分别通过控制步进电机的转速和转数来实现。步进电机转速与输液速度成正比,通过调整控制电机的转速即可改变输液的速度[11-12]。输液量与步进电机运行的步数,以及步进电机每步输出药液的体积成正比[11,13]。不同的输液管对应的脉冲当量不同,通过控制步进电机运行的步数即可控制输液量。步进电机工作中,按照设定的参数设定电机工作初始化状态,并按照设定状态生成脉冲信号,驱动步进电机按设定步进角方向转动,并通过改变控制脉冲数量控制角位移量,实现液面精确控制;与此同时,通过设定的脉冲频率控制电机转动速度,从而实现输注速度控制。按照不同控制精度需求,采用DG-1盘状蠕动泵可设置整步、2、4、8、16、32、64及128细分等不同精度的控制模式,通过设置驱动器模式开关可以选择细分模式,也可对输入信号端施加对应的控制信号[14-15]。
2.2.4 电源管理
系统采用单片机扩展A/D检测电源输出功率,通过电源检测传感器反馈功率差值输出控制信号,开关管(MOSFET)[16]打开及关闭的时间比率来稳定输出电压。利用单片机控制开关电源,实现电源功率监测、电源过压/过流保护等功能。
2.2.5 传感器系统
传感器系统由传感器、A/D转换电路、信号处理电路、放大器以及多传感器记录器组成。传感器检测滴速、空液、气泡、阻塞等输液管状态,经A/D转换为数字信号,由信号处理电路预处理后传输到控制系统。传感器电路采用电桥构成采集电路,当存在压差时,差压信号加载到测量传感器上,传感器输出随之变化,引起电桥失衡。电桥失衡引起的信号变化经运放LM2904放大后,经A/D转换器进行转化,最后传入AT89S52并进行存储或显示等,最后将数据通过通讯串口送至上位机分析[17]。
(1)阻塞检测。当输液出现阻塞并超过设定的压力范围后,触发开关并向控制器发送低电平信号,控制器收到信号后,驱动控制步进电机停止运行并触发声光报警。
(2)气泡及排空检测。气泡及排空检测是确保输液泵安全的重要功能,由于输注液体密度、粘稠度及光透性的多样性,需要检测电路具有良好的兼容性[18-19]。系统采用超声波传感器,由换能晶片在电压的激励下发生振动产生,具有频率高、波长短、绕射现象小、方向性好、能够成为射线而定向传播等特点。不仅对被检液体具有很好的兼容性,同时具有性能稳定的优点[20]。当处于输注状态时,高频脉冲产生振荡脉冲驱动超声换能器发射端[20-21]。生成的超声波从发射面发出后,部分被传感器漫反射,大部分穿过壳体,透过空气隙,再一次穿过管路的管壁进入流动的液体中。传输过程中,部分能量在空气隙中损失,另外部分受管壁材料的结构影响被衰减,大部分能量在流动的液体上传输到接收端管路的管壁,并按发射端的逆过程传到接收端的超声波换能器,转换成与发射频率同频的被传输过程中介质所损耗后的微弱电信号。在没有混入空气泡的正常情况下,液体密度相对稳定,超声波在液体中顺利的传输到接收端,信号无较大的畸变。若页面低于传感器检测面,在超声波传播路径上的液体密度随之降低,接收到的信号能量被衰减,反映出的波形在幅度上也会随着液面的降低迅速地减小。若流动的液体中有大小不等的气泡,液体的密度将降低,超声波在传播路径上还会被空气泡散射[22]。与正常情况下相比,接收端接收到的能量将衰减,经接收端接收信号,最终判断出气泡大小,从而实现高精度控制。
(3)滴速测量。系统采用光电传感器检测滴注速度及液面信号,该方法的实现具有灵敏度高、体积小、精度高以及非接触测量的优点,由发光二极管发射器及光敏三极管接收器组成[23]。当无液滴滴注时,光敏三极管接收器光照度最大,可接收光电流最大;当存在液滴滴注时,照射光线光束发散,导致光线强度减弱,接收器接收到信号后经整形、调制后计数,实现滴数检测功能。
(4)输液量测量。输液量与步进电机运行步数、每运行一步输液泵输出液体体积成正比,系统可通过步进电机步数精确控制输液速度及输液量[24]。
2.2.6 输入系统
输入系统采用PS/2键盘及触摸屏实现,键盘对输液器进行参数设置,并输入命令。
2.2.7 输出系统输出系统采用液晶、蜂鸣器及发光二极管作为系统输出。
(1)屏幕。系统通过液晶屏幕显示输出信息,屏幕采用12864液晶显示,可显示4行8列共32个16×16点阵的汉字,内部提供128×2字节的字符显示随机存储器(random access memory,RAM)缓冲区显示数据(display data,DDRAM)。通过将字符显示编码写入该字符显示RAM实现。根据写入内容的不同,可分别显示CGROM(中文字库)、HCGROM(ASCII码字库)及CGRAM(自定义字形)的内容[25]。
(2)声光报警。系统通过发光二极管和蜂鸣器实现电源异常、气泡、空液等声光报警功能,提高了系统的可靠性和安全性。
2.2.8 上位机管理系统
系统采用Access 2007结合Microsoft Communications Control控件[26]开发单片机上位机管理系统,通过串口通讯实现数据采集、输注记录、设置参数及报警信息保存。
3 数字式微步进分度输液泵的应用
设计的数字式微步进分度输液泵在运转中,当输液管体内注入药液时,随着泵体运转,带动活塞将药液连续输入到患者。较之注射泵,对设备持续性、稳定性及安全性提出了更高的要求。因此,系统采用以DG-1盘状蠕动泵作为运动控制核心,采用L298作为驱动芯片[27]。
(1)系统测试。系统在测试中保存了泵信息、设置参数等信息(如图3所示)。
图3 上位机系统运行输注记录界面图
(2)输注记录。输液泵输注线性度较高,实现了输液速度和输液量较为精确控制功能。通过调节泵控制模式,控制脉冲与电机角位移成正比,可通过控制脉冲数控制步进,从而实现输液量精确控制[25];步进电机操作度高,实时响应力强,调节速度范围宽,可实现电机启停、改变方向、速度控制、填充排空等优势(如图4所示)。
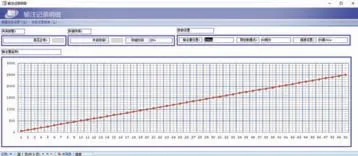
图4 上位机系统运行输注记录明细界面图
(3)输液泵排气功能。在需求分析中,尤其是在输注前,需要实现快速排空输液管内空气的功能[26-27]。当护理人员安装输液管后,使用“排空”按键,输液泵能够实现快速排气。同时,为防止误报,需要及时关闭气泡报警。当空气排空后,再次按下“排空”,进入参数设置状态并准备正常输注。同时,在测试中也发现,当输液泵使用一段时间后,可能会出现挤压活塞磨损、弹簧变形[28]的状况,从而导致输液精度下降。
(4)输液泵补偿功能。系统采用软件补偿方式消除误差影像,触发“补偿”功能后,自动执行误差消除程序,降低误差影响。当输液泵连续工作后,由于电机持续发热,容易发生气泡检测传感器基准值偏离标准的状况,为避免此现象的发生,当系统连续工作5 h以上时,采用连续气泡基准值检测算法,及时校正气泡基准值[29]。由于受步进电机本身特性的限制,在电机启、停及运行速度突变时,往往会出现失步现象,从而影响输液泵系统精度[3,30]。为解决这一问题,系统采用了软件实现自动升、降速的方法。
4 结论
数字式微步进分度输液泵可精确控制输注流量及流速,监测输注过程,并可应对电源、气泡、空液等异常情况,其应用不仅能够提高医护人员的工作效率,同时能够加强输注的安全性和精确性。数字式微步进分度输液泵能够改善患者在输液期间的舒适性和便携性,同时,能够应用于野外、路途等特殊场景,使其能够提高患者输液期间的治疗体验,降低患者长期保持固定体位带来的不适感,克服了传统输液泵输注期间难以移动的缺点[31]。
数字式微步进分度输液泵具有控制精度高、适用范围广泛的特点,并具有较强的可扩展性,对类似的系统开发具有一定的参考价值。
猜你喜欢
现代仪器与医疗(2022年2期)2022-08-11
新潮电子(2021年7期)2021-08-14
建材发展导向(2021年13期)2021-07-28
转化医学杂志(2020年5期)2020-10-21
中国医疗器械信息(2020年16期)2020-09-13
中国医疗器械信息(2020年22期)2020-01-17
中国现代药物应用(2019年18期)2019-10-15
无锡职业技术学院学报(2019年2期)2019-05-05
儿童故事画报·发现号趣味百科(2019年9期)2019-02-02
中学课程辅导·教师通讯(2018年7期)2018-09-14
