带鉴别分析的多视角SAR图像联合决策及目标识别
2019-03-06 10:22蔡德饶宋愈珍
中国电子科学研究院学报 2019年1期
蔡德饶,宋愈珍
(上饶职业技术学院 信息工程系,江西 上饶 334100)
0 引 言
合成孔径雷达(Synthetic Aperture Radar,SAR)具有全天时、全天候和对地表穿透力等优良特性而成为现代战场侦察的重要手段。针对SAR目标识别技术,国内外学者开展了广泛而深入的研究[1]。
现有的SAR目标识别算法大多针对单视角SAR图像,即通过对单视角SAR图像的特征提取和分类决策判别其目标类别。常用于SAR目标识别的特征包括几何形状特征[2-3]、变换域特征[4-5]、电磁散射特征[6-7]等。文献[4],[8],[9]分别将K近邻分类器(K-Nearest Neighbor,KNN),支持向量机(Support Vector Machines,SVM)以及稀疏表示分类器(Sparse Representation-based Classification,SRC)应用于单视角SAR图像目标识别,取得了较好的识别性能。然而,单视角对于目标识别提供的鉴别力十分有限并且对于部分扩展操作条件(Extended Operating Condition),如强噪声干扰、部分遮挡等,不具有稳健性。为此,研究人员通过联合多视角SAR图像的方法实现更为稳健的目标识别。文献[10]采用SVM分别对多个视角的SAR图像进行分类并基于投票机制进行决策融合。文献[11]针对多视角SAR图像提出一种静态建模方法,它可以将来自同一目标的多视角SAR图像信息集成到一个综合的数据结构中,进而采用模板匹配的方法完成目标识别。文献[12]将联合稀疏表示模型应用于多视角SAR图像目标识别,通过发掘不同视角之间的内在关联提升了目标识别性能。
尽管这些多视角的SAR目标识别方法都有效提高了SAR目标识别性能,但这些方法都没有对参与融合的多视角SAR图像进行选择。事实上,针对特定的识别场景,某些视角的SAR图像并不能提供较强的鉴别力反而有可能损害决策融合的结果。因此,预先对每一个视角的决策可靠性进行分析十分必要。基于这样的思想,本文提出一种多视角SAR图像决策融合方法。首先采用SVM对各个视角的SAR图像进行独立决策。根据SVM输出的决策变量(即测试样本属于各个训练类别的后验概率值)计算各个视角的决策可靠性。在此基础上,通过门限判决的方式选取其中可靠性较强的视角参与最终的决策融合。采用贝叶斯决策融合方法[13]对选取视角的决策变量进行融合,并根据融合后的结果判决目标类别。鉴别分析的引入可以有效提出多视角SAR图像中不利于当前识别情形的视角从而得到更为稳健的融合决策结果。为了验证提出方法的有效性,基于MSTAR(Moving and Stationary Target Acquisition and Recognition)数据集进行了目标识别实验。
1 单视角SAR图像决策可靠性分析
1.1 SVM
支持向量机通过核函数映射的方式原始数据投影到高维空间并基于结构风险最小化的原则求解决策空间的超平面[13-14]。若以x表示待识别的样本,φ(·)表示核函数的非线性映射,SVM的决策函数如下。
f(x)=wT·φ(x)+b
(1)
公式(1)中w表示权重系数,b为偏置项,它们是通过对训练样本的学习得到。图1给出了SVM的原理示意图,图中黑色圆圈和红色方框分别代表两个不同类别,绿色边框的样本为挑选的支持向量,用于估计权重系数和偏置项。
原始的SVM分类器针对两类分类问题,为了解决多类分类问题,研究人员采用一对一、一对多等策略将原始SVM推广到多类问题。目前,应用较广的SVM工具包是台湾学者林智仁开发的LIBSVM[14],该工具包可以直接估计当前测试样本属于各个训练类别的后验概率。

图1 支持向量机示意图
1.2 决策鉴别性分析
假设训练样本包括C类目标,测试样本经过SVM得到的决策变量为[P1,P2,…,PC],则认为的目标类别属于获得最大后验概率的训练类别:
(2)
然而,根据公式(2)的决策准则,不同的后验概率矢量完全可能获得相同的决策,但这些决策的置信度并不相同。例如,针对3类目标的识别问题,SVM得到的后验概率P1=[0.2 0.3 0.5]和P2=[0.1 0.4 0.5]根据公式(2)将会获得相同的决策。对比两组决策矢量,显然P1的可靠性更强,因为其中第3类目标对应的后验概率显著高于另外两类。基于以上论述,本文采用下式定义决策的可靠性:
(3)
公式(3)中,PK代表一组后验概率中的最大值。定义最大概率值与次大概率值的比值为本文中的可靠性系数,因此R>1。R值越大表明可靠性越强。
2 多视角SAR图像联合决策
2.1 贝叶斯决策融合
提出方法利用贝叶斯决策融合对多视角SAR图像的决策融合[13]。贝叶斯决策融合可以通过联合多个信息源的独立决策获得更为可靠的结果[16-17]。记C类目标为{T1,T2,...,TC}。对于K个参与融合的视角Y=[y1,y2,…,yK],yk属于任一类别的后验概率为:
(4)
P(Ti|Y)=P(Ti|y1)P(Ti|y2)…P(Ti|yK)
(5)
最后,很久最大后验概率的准则判定目标类别如公式(6)所示。
(6)
2.2 基于可靠视角决策融合的目标识别
本文对多视角SAR图像预先根据其决策可靠性进行筛选,选取具有较强可靠性的视角参与最终的决策融合。图2显示了本文方法的基本流程。首先对多视角SAR图像分别采用SVM进行分类,根据决策值计算各个视角的可靠性。设定可靠性门限T,选取决策可靠性高于门限的视角参与最终的贝叶斯决策融合,判别目标类别。为了降低原始SAR图像的维度,采用主成分分析(Principal Component Analysis,PCA)[4]对训练和测试样本进行特征提取,获得80维的特征矢量。SVM分类器采用LIBSVM[14]中的多类SVM。

图2 本文识别方法的流程Fig.2 Procedure of the proposed recognition method
3 实验与分析
3.1 实验数据集
为了验证提出方法的有效性,本文在MSTAR数据集上进行目标识别实验。MSTAR数据集包含了10类军事目标的SAR图像,分别率为0.3 m×0.3 m。10类目标的光学图像如图3所示。表1列出了本文实验中使用的训练样本和测试样本,采用俯仰角17°下的10类目标SAR图像作为训练样本,俯仰角15°下的10类目标图像作为测试样本。
选用基于SVM[3]和SRC[4]的单视角识别方法以及文献[5]中的基于SVM的多视角融合方法和文献[7]中多视角联合稀疏表示方法作为参考方法进行对比实验,分别记为SVM,SRC,MSVM和JSRC。和本文方法一样,这些对比方法中同样采用PCA对原始SAR图像提取80维特征矢量。根据实际过程中的多次观察,设置可靠性门限T=1.1。
3.2 实验结果与分析
3.2.1 标准操作条件
采用本文的识别算法对表1中的10类目标进行识别实验。实验中采用了3个连续视角SAR图像,相邻视角的方位角间隔设定为2度。图3显示了本文方法对10类目标的识别结果。本文方法对10类目标中任意一类的正确识别率均达到93%以上,最终的平均识别率为96.82%,充分验证了其有效性。
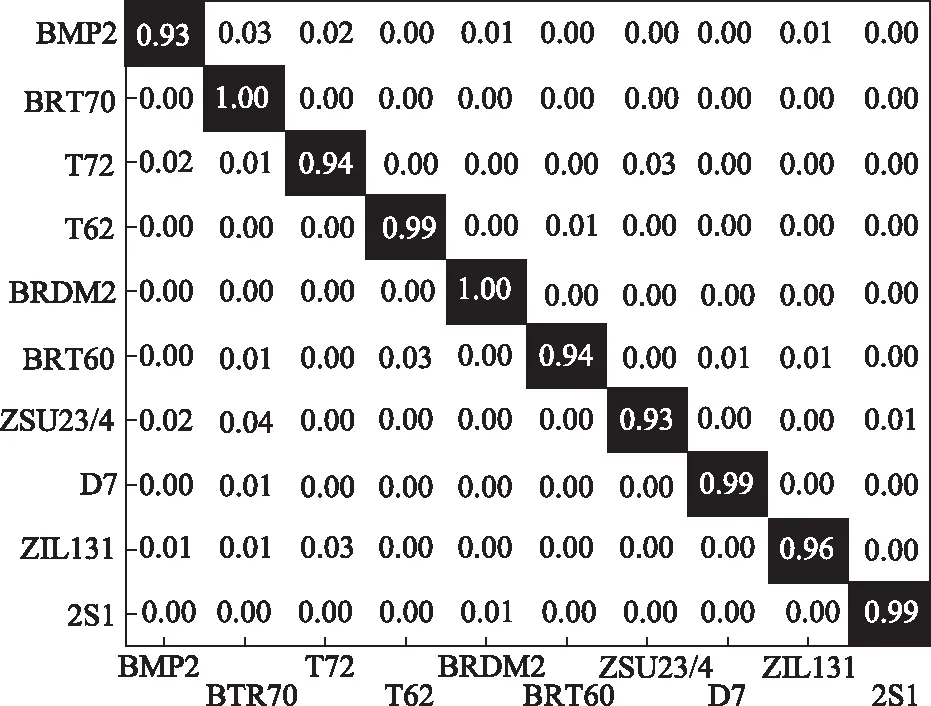
图3 本文方法对10类目标的识别结果
表2对比了各类方法的识别性能。相对单视角方法,多视角方法具有较为显著的优势。3类多视角方法具有相近的平均识别率,这是因为标准操作条件下各个视角的SAR图像均具有较强的鉴别力,可靠性门限的筛选作用并不是十分明显。根据上述实验结果,本文方法在标准操作条件具有最高的平均识别率,表明了其优越性。

表1 本文使用的训练和测试样本

表2 各类方法的对10类目标的识别性能
多视角联合决策的识别性能与视角数目息息相关。一般而言,参与决策融合的视角越多,其提供的目标描述越为充分,因此可以取得更好得识别性能。表3给出了本文算法在不同视角数据下的识别性能,其中相邻视角的SAR图像方位角间隔设为2度。可以看出,随着视角数目的增多,本文方法的识别性能不断提高。

表3 本文方法在不同视角数目下的识别性能
为了给目标提供更丰富的描述,参与融合的SAR图像应当具有一定的差异性。由于SAR图像随方位角变化较为敏感,当两幅SAR图像存在较大的方位角差异时,其特性差异较为明显。因此,当输入的多视角SAR图像存在较大的方位角间隔时,决策融合越有益于识别性能的提高。图4显示了本文算法在不同方位角间隔下的识别性能,实验中视角数目设为3。可以看出,随着相邻视角SAR图像的方位角间隔的增多,识别性能整体呈现上升趋势。对比而言,本文算法具有最高的平均识别率,验证了其有效性。
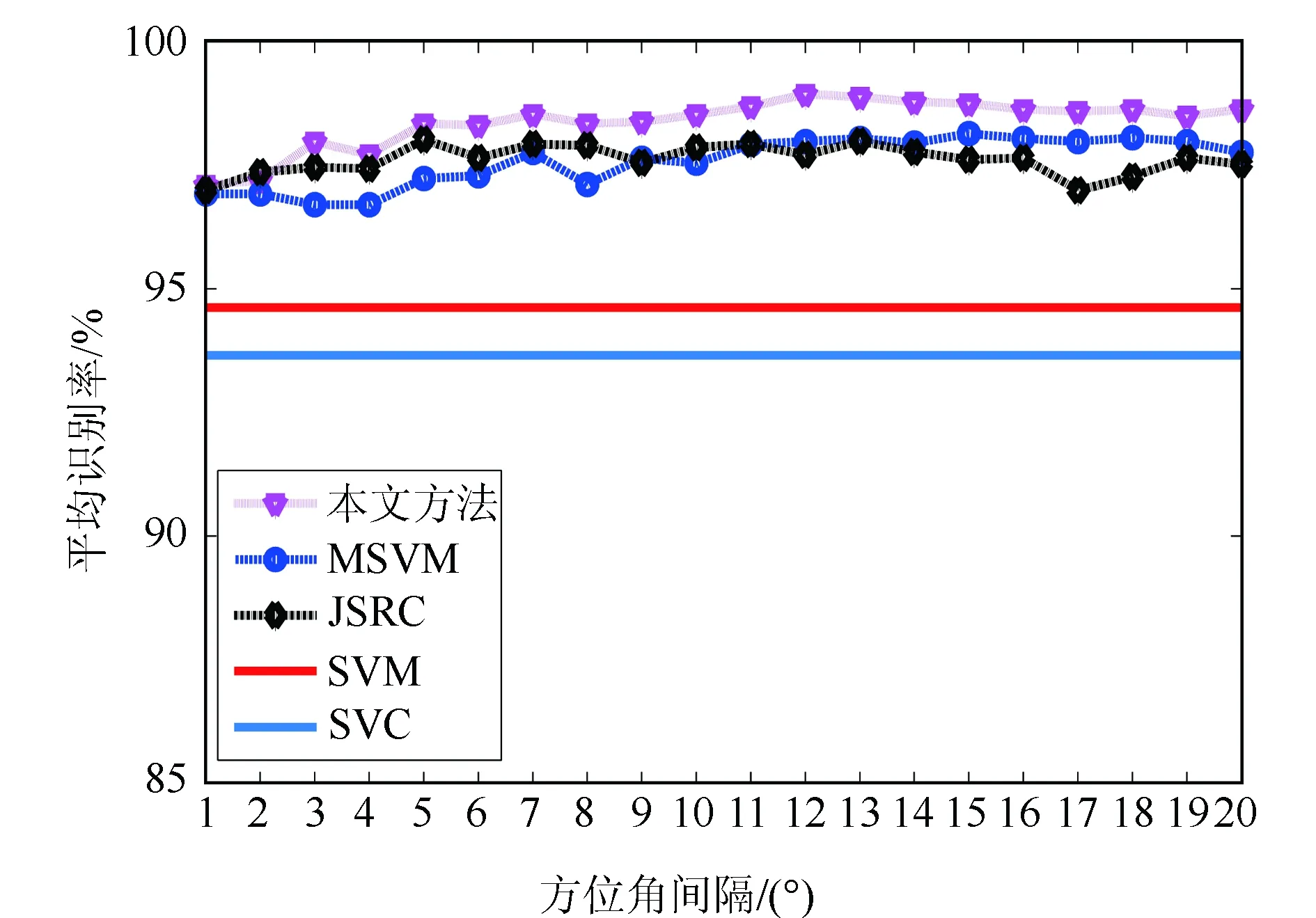
图4 各类算法在不同方位角间隔下的识别性能
3.2.2 噪声干扰
由于背景环境和雷达系统中存在大量的噪声,因此实测的SAR图像往往受到严重的噪声干扰。为了验证提出算法对于噪声干扰的稳健性,本文首先向原始的10类目标测试样本中添加不同程度的高斯白噪声[6]。进而测试了方法在不同信噪比(Signal-to-noise ratio,SNR)下的识别性能。图5显示不同算法在噪声干扰下的性能对比。本文算法在各个信噪比下均取得了最高的识别性能,验证了其对于噪声干扰具有最强的稳健性。同样,多视角的方法相对单视角方法具有更佳的识别结果。相比它两类多视角决策融合方法,本文方法性能更优,这是因为可靠性门限的引入有效提出了不适应当前条件(噪声干扰)的视角。

图5 各类算法在不同信噪比下的识别性能
3.2.3 部分遮挡
由于真实环境中存在树木、建筑物等障碍,地面目标往往在部分视角下被遮挡,导致获取的SAR图像并不能完成反映目标整体信息。本文按照文献[7]中的目标遮挡模型通过去除一定比例的目标区域模拟部分遮挡的SAR图像。各类方法在不同遮挡程度下的平均识别率变化曲线如图6所示。同样,多视角方法相比单视角方法具有更好的识别性能。本文方法仍然可以保持其最强的稳健性。在遮挡情形下,部分视角的鉴别力较弱,通过可靠性门限判决剔除这些视角有利于后续稳健的决策融合,因此本文方法在各类方法最为稳健。

图6 各类算法在不同遮挡程度下的识别性能
4 结 语
本文提出一种基于多视角SAR图像决策融合的目标识别方法。首先采用SVM分别对各个视角进行独立决策,进而根据输出的后验概率计算每个视角对于当前识别条件的适应性。通过门限选择的方式选取可靠性较强的视角基于贝叶斯决策融合以提高识别算法的稳健性。通过在10类MSTAR目标数据上的识别实验表明,本文方法显著提高了目标识别算法在标准操作条件和部分扩展操作条件下的有效性和稳健性。
猜你喜欢
纺织科学研究(2021年9期)2021-10-14
中国卫生统计(2020年3期)2020-06-28
中学生数理化·七年级数学人教版(2019年6期)2019-06-25
统计与决策(2019年6期)2019-04-22
电子制作(2018年23期)2018-12-26
北京航空航天大学学报(2017年6期)2017-11-23
电子制作(2017年2期)2017-05-17
电子制作(2017年2期)2017-05-17
雷达学报(2017年6期)2017-03-26
郑州大学学报(医学版)(2015年2期)2015-02-27