风电机组惯性能量支撑过程量化分析
2019-03-06 09:22:36许国东吴跨宇李照霞余清清陈康生
浙江电力 2019年2期
许国东,吴跨宇,杨 靖,李照霞,余清清,陈康生
(1.浙江运达风电股份有限公司,杭州 310012;2.国网浙江省电力有限公司电力科学研究院,杭州 310014)
0 引言
变速恒频风电机组的机械功率与电磁功率解耦、转子转速与电网频率解耦,在电网频率波动时无法表现出类似同步发电机的惯量特性。因此,当系统中风电接入的比例增大时,势必会降低整个系统的总惯量和调频能力。当系统中出现功率失衡时,频率变化速率将增大,频率偏差也会增大,从而降低整个系统的稳定性。
为了更好地保证风电并网后系统的安全稳定运行,许多国家在其电网导则中已经对风电参与电力系统调频有了较为明确的要求和规定。使变速恒频风电机组参与系统频率的调节已成为一项重要而迫切的任务,是未来风力发电大规模并网应用中亟待解决的问题。
国内外有很多文献致力于该方向的研究工作,在仿真和实践中实现提取风电机组惯性能量支持电网的功能,对多种可采取的控制方法进行了探讨[1-2],对风电机组进行了一些现场的惯量响应测试[3-4],对惯量响应控制过程中的参数敏感性进行了分析[5-6],对风电机组在不同运行模式下的策略进行了对比[7]。由于风电机组惯性能量支撑动态过程的影响因素较多,其理论结合实践的量化计算研究一直存在空白,本文就该问题展开探讨。
1 风电机组在惯性能量支撑过程中的能量关系
风电机组在惯性能量支撑过程中的期望运行轨迹见图1,从支撑到恢复的过程为点1→2→3→4→1。
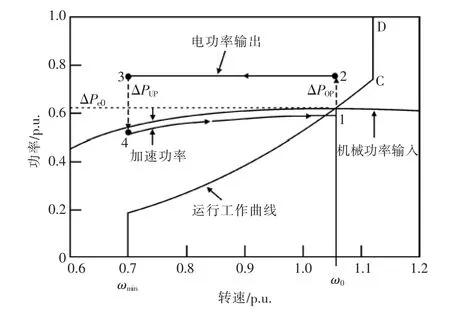
图1 惯量响应过程中的风电机组运行轨迹
在系统因有功功率失衡而产生频率波动时,其过程见图2。在该过程的前期,风电机组通过控制系统感受到频率变化时,超额发出有功功率,以提高频率最低点fmin的值。通常,t1范围在5~15 s, t2范围在 30~60 s。
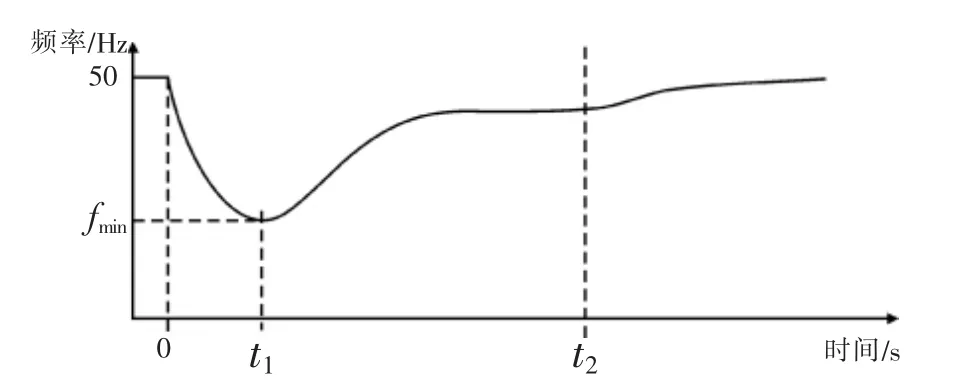
图2 系统频率的变化过程
为达到该目的,风电机组有两种实现方式。其一为虚拟同步发电机,使风电机组在控制回路中加入所虚拟同步发电机的特性,主要是惯性时间常数H,风电机组在频率动态过程中拟合为所期望的同步发电机,其惯性能量支撑过程见图3。其二为风电机组在感受到频率波动时,以固定功率增量进行一定时间的支撑,其惯性能量支撑过程见图4。系统频率在降低过程约10 s左右达到最低点,以虚拟同步方式难以实现这个时间长度的支撑,而固定功率增量和时间则可根据需求灵活调节,国内外在实际工程应用中多采用该方式。
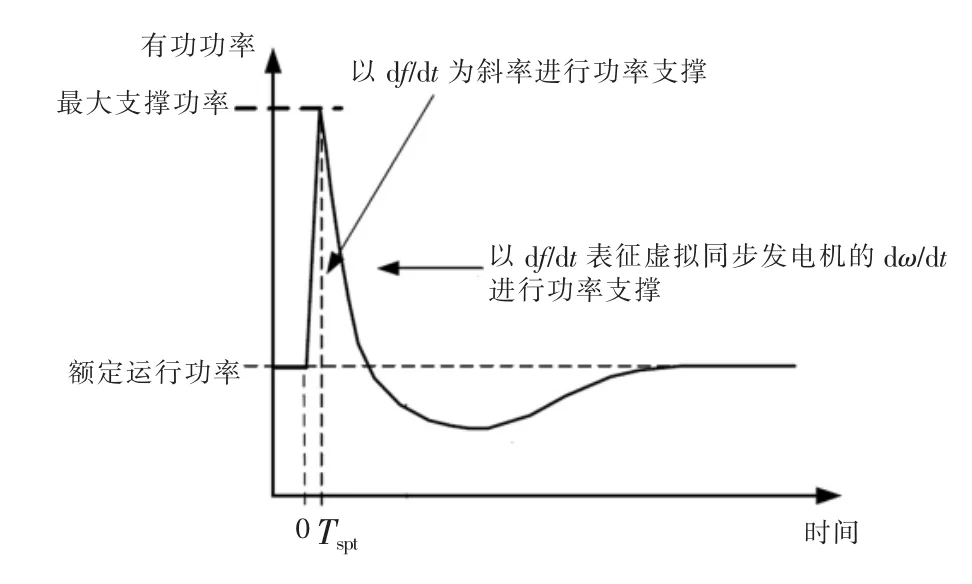
图3 虚拟同步控制下的风电机组惯性能量支撑过程
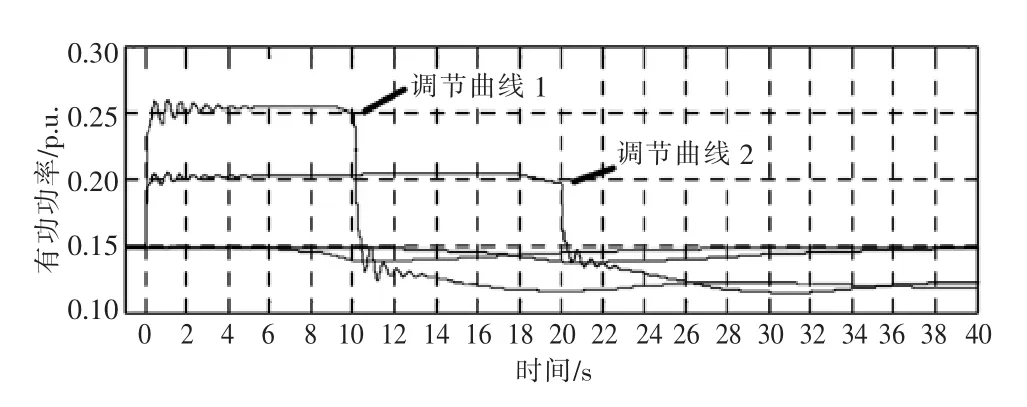
图4 固定功率增量的风电机组惯性能量支撑过程
在惯性能量支撑过程中,风电机组的输入能量来自叶轮吸收的气动功率:

式中:ρ为空气密度;A为叶轮扫掠面积;v为通过叶轮的等效风速;Cp(β,λ)为风能利用系数,其中β为桨距角,λ为叶尖速比。
Cp(β, λ)可表述为:
式中:ω为叶轮转速;R为叶轮半径;a,b,c,d,e为叶片参数,可根据具体叶片特性进行设置。
那么,在风电机组因频率稳定需要提取惯性能量支持电网的过程中,叶轮吸收的风能为:

式中:t为时间变量;Tspt为支撑时间。
在该过程中,风电机组其他方面的能量变化为输出电能ΔEe,机械和电气损耗ΔEloss以及惯性旋转动能ΔEkic,在整个过程中,应有

由图1可见,当系统频率发生突降时,风电机组超额发出固定电功率支持电网,经过Tspt(即图1中从点2运动至点3)后,转速下降,继而输出电功率下降,使机组能重新加速,回调到原有状态。
在提取惯性能量支持电网频率时,输出电功率大于输入的机械功率,即风电机组可进行功率支持的时间长短和提取的超额电功率大小直接相关,同时也取决于叶轮吸收风能系数的变化。在功率支持后,为恢复机组转速,必须使输出电功率小于输入机械功率,从实际情况来看必然有点4的输出功率小于点1,也即产生短时功率缺额Plack,该现象也见于图3和图4。从电网稳定运行的角度,希望该功率缺额得到有效限制。
根据能量关系的定义可知:

式(5)—(7)中: Pspt为支撑功率; η 为发电效率; J为转动惯量;ωg为发电机转速,其下标1和2分别代表功率支撑的起始状态和终止状态。
由上述分析可知,式(4)中只有ΔEaero是需要进行动态分析的,其余能量根据确定的边界条件和过程测试数据就可以相对准确地计算出来。
2 风电机组惯量响应的约束性条件
假设在惯性能量支撑过程中风速保持不变,则:
当风速大于额定风速时,机组通过桨距角β的调整预留了更多的能量,可以在需要进行惯性能量支持时进行释放。而在风速未达到额定值时,风电机组没有能量预留,桨距角相对固定,实现惯量响应的难度更大[8-9]。在该运行段不存在β 变化对 Cp(β, λ)的影响, 由于 Cp(β, λ)连续变化,可以近似对Cp进行二阶Taylor(泰勒)级数展开:

进而
将式(10)和式(11)代入式(8), 并且由图 4可以近似认为在惯量响应进行功率支撑的过程中转速线性下降,那么:
式中:ωT为叶轮转速。
叶轮转速和发电机转速的关系为:

式中:G为齿轮箱速比。
由式(4)—(7)可知:

将式(5)—(7)和式(12)代入式(14)后, 即可在确定风电机组起始状态、支撑功率幅值、机组气动特性和转速边界条件的情况下求得功率支撑时间。
从另一方面可知,在外部条件确定的情况下,支撑时间Tspt是支撑功率Pspt和惯量响应结束时的转速ωg2的函数。因而,在确定支撑时间Tspt和支撑功率Pspt时,也可反过来求得支撑结束时的转速ωg2,进而得到当时的λ2。显然,只有叶轮吸收的气动功率大于输出电功率和损耗功率之和时,转速才能恢复到上行,也即:

式中:Pem2为功率支撑结束后的电功率;Pini为功率支撑开始前的电功率;Ploss为机组的功率损耗。由此,可以建立起风电机组在进行惯量响应时支撑功率Pspt、支撑时间Tspt和功率缺额Plack之间的解析关系。
3 理论计算和试验结果
WD100-2MW风电机组参数见表1。

表1 风电机组参数
现场测试时,在风电机组并网点采用主回路串联大容量全功率变频器作为扰动装置模拟电网频率下跌,见图5[10]。
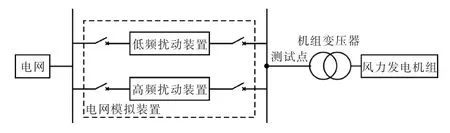
图5 测试装置
在机组运行功率为1 400 kW,运行转速为126.5 rad/s,风速为8.4 m/s,桨距角为0°的初始情况下以电网模拟源进行频率扰动,风电机组测量到电网频率跌落时,立刻进行0.08(标幺值)增量的有功功率支撑,时间长度为10 s。
WD100-2MW风电机组现场实际测试结果见图6—9,初始功率为1 400 kW。
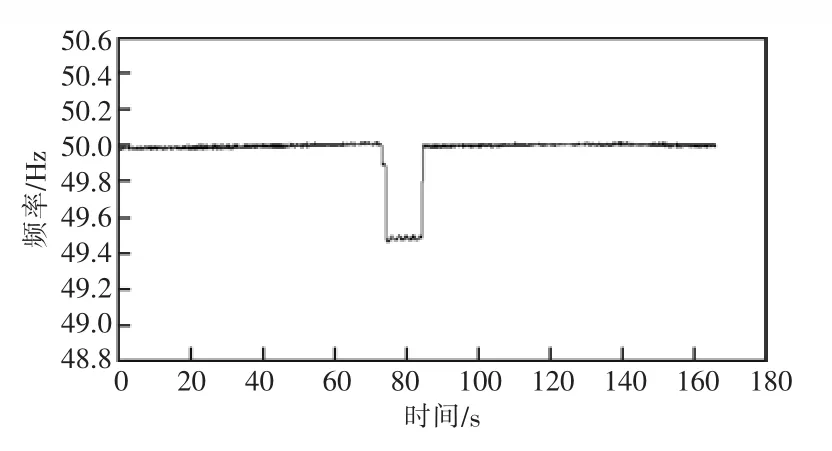
图6 惯性能量支撑现场测试过程中的风电机组并网点频率
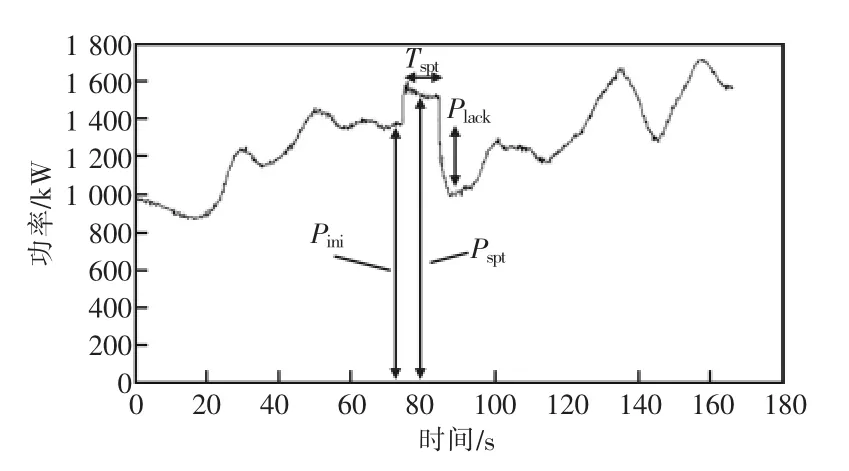
图7 惯性能量支撑现场测试过程中的风电机组发电功率
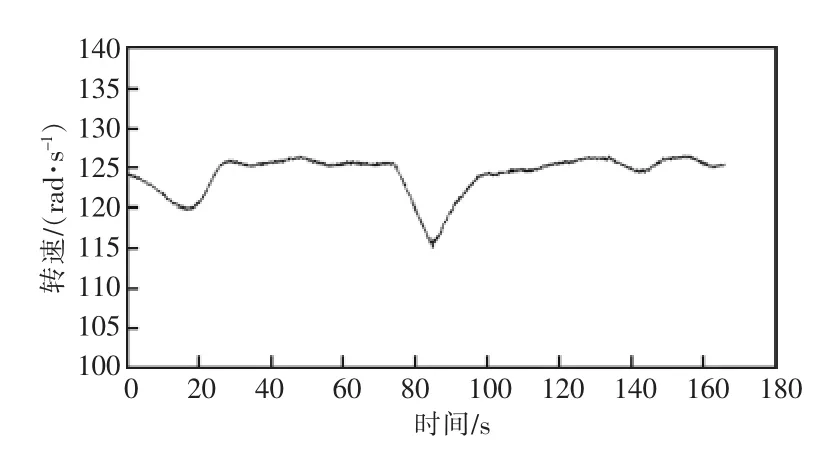
图8 惯性能量支撑现场测试过程中的风电机组发电机转速
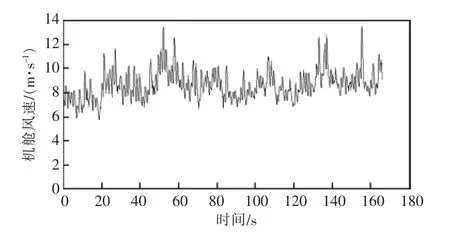
图9 惯性能量支撑现场测试过程中的风速
由图6—9可知,惯量响应结束时,最低运行转速约为115.0 rad/s,Plack约为380 kW。在图6—9中73~83 s时间段内机组执行了惯性能量支撑,可计算得到此时间段内有效平均风速为8.4 m/s。
根据实际叶片的气动特性进行参数拟合可获得叶片参数a,b,c,d,e,结合机组工作运行曲线可计算得出图10的关系。可见,在达到额定风速之前,Cp对λ偏导数的变化很小。

图10 Cp对λ的偏导数与风速的关系
通过式(14)的计算,可以得到ωg2和Tspt之间的关系,见图11。

图11 ω2和Tspt之间的计算关系(初始功率1 400 kW)
从图11可见,对应Tspt为10 s时,理论计算的转速最低点约115.2 rad/s,与实测值的偏差为0.2 rad/s。 根据式(15), 可以得到
将式(17)代入式(2)即可得到 Cp(β, λ2), 可以求得Plack的计算值为313 kW,而实际测试值约为380 kW,说明在本次试验中,在功率支撑结束后,所给定的有功功率输出小于理论计算中临界的有功功率输出值,也即该时刻产生的功率缺口大于理论计算的临界值,这促使了机组转速的迅速恢复,可见于图8。
根据理论计算,当功率支撑结束时,如给定的有功功率大于理论计算的临界值,则机组转速将继续下行,不能恢复到原有的稳定运行状态。
4 结语
基于兆瓦级风电机组在系统频率波动时进行惯性能量支撑现场试验的测试数据,本文通过提取风电机组惯性能量的机理与特征参数的关系,结合动态控制过程,分析了风电机组参与电力系统频率的动态过程,初步探讨了关键参数间的关联性,根据风电机组惯量响应过程的实际测试数据进行了定量计算。
在风速稳定的情况下,基于对机组本身特性的分析,实现对风电机组惯量响应过程中期望最优结果的预判是有一定可行性的,但该计算过程的预设前提和干扰因素较多,后续仍然需要继续进行大量理论结合实践的研究工作[11],比如研究风速的动态变化、实际叶片气动特性和理论设计的差异、传动效率变化对风电机组惯量响应过程的动态影响等方面[12-13]。
此外,在已经进行的风电机组惯性能量支撑现场测试过程中,采取了固定功率和时间长度的支撑方式,在风电场实际运行的情况下,还可根据电网频率和机组本身的情况确定支撑功率和时间,如为避免功率支撑结束后产生过大的有功功率缺额可提前退出功率支撑,而机组在执行惯量响应时对自身机械结构的影响也同样有待分析研究[14-20]。
猜你喜欢
中学生数理化·八年级物理人教版(2023年3期)2023-03-21 00:40:16
现代电力(2022年2期)2022-05-23 12:46:16
中学生数理化·八年级物理人教版(2022年3期)2022-03-16 05:55:06
水泵技术(2021年3期)2021-08-14 02:09:26
中国惯性技术学报(2018年1期)2018-05-10 16:24:00
制造技术与机床(2017年6期)2018-01-19 02:40:54
中学生数理化·八年级物理人教版(2017年3期)2017-11-09 03:05:23
重庆理工大学学报(自然科学)(2017年5期)2017-06-29 12:01:58
小学科学(学生版)(2016年1期)2016-10-09 01:53:02
工业设计(2016年7期)2016-05-04 04:02:45