
全集成自动化软、硬件在矿山企业的应用和思考
2019-03-05 03:08邱永红
世界有色金属 2019年23期
邱永红
(白银有色集团股份有限公司深部矿业公司,甘肃 白银730900)
虽然智能化、自动化在现代矿业生产中的应用已不是新生事物,但在我国绝大多数矿山,尤其是已经开发十几年以上的老矿山,要实现智能化、自动化生产还是任重道远,这些企业面临的困难无非是基础设施距离实现自动化差距大,系统改造需要较长时间和大量经费。对于这些老矿山而言,只能选取单个系统实现自动化,然后以点带面,再逐个系统实现自动化,然后全网合并,从而实现真正意义上的智能化、自动化。本文以矿山高位水池上水的远程集控自动化为实例,阐明如何利用全集成自动化软、硬件系统来实现智能化、自动化的目的。
1 布局和组网
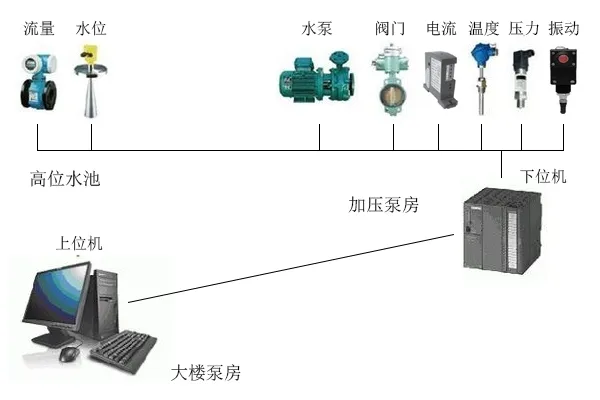
图1 高位水池上水控制系统硬件连接图
在监视控制与数据采集系统中,上位机是指可以直接发出操控命令的计算机,一般是PC/主机,其屏幕上显示各种信号变化(液压,水位,温度等)。下位机是指直接控制设备、获取设备状况的计算机,一般是PLC/单片机,它连续读取设备状态数据(一般为模拟量),转换成数字信号反馈给上位机。本实例是一个高位水池上水的控制系统,涉及高位水池、加压泵房、大楼泵房三地,相距较远,且高位水池位于山顶,故除在三地均架设无线网桥外,于半山腰尚增设一处无线网桥作为中继。同时为避免长距离敷设电源,采用太阳能电池板为半山腰无线网桥供电。其余控制设备、采集设备就近连接,见图1。
2 开发流程
博途是西门子公司发布的一款全新的全集成自动化软件。它是业内首个采用统一的工程组态和软件项目环境的自动化软件,几乎适用于所有自动化任务。借助该全新的工程技术软件平台,用户能够快速、直观地开发和调试自动化系统。
打开软件后,在博途视图中,其开发流程大致分为五步:
(1)设备和网络:组态设备。
(2)PLC编程:创建PLC程序。
(3)运动控制&技术:组态工艺对象。
(4)可视化:组态HMI画面。
(5)在线与诊断。
2.1 组态设备
设置自动化系统需要对各硬件组件进行组态、分配参数和互连。可在设备和网络视图中执行这些操作。自动化系统启动时,CPU会比较软件的预设组态与系统的实际组态。如此将检测可能的错误并直接进行报告。
2.1.1 添加S7-1200 CPU,用于创建PLC程序
在项目树中,双击“添加新设备”,单击“控制器”,双击“SIMATIC S7-1200”将其展开,双击“CPU”将其展开,双击“CPU 1212C DC/DC/Rly”将其展开,单击“6ES7 212-1HE40-0XB0”,版本依实际选择为V4.2,确定。双击其以太网接口,在IP协议中,更改IP地址为PLC实际的IP地址。
2.1.2 添加PC工作站,用于组态HMI画面
在项目树中,双击“添加新设备”,单击“PC系统”,双击“SIMATIC HMI应用软件”将其展开,单击“WinCC RT Advanced”,版本依实际选择为15.0.0.0,确定。在硬件目录中,双击“通讯模块”将其展开,双击“PROFINE T/E thernet”将其展开,单击“常规IE”,将其拖曳到右侧的蓝色方框中。双击其以太网接口,在IP协议中,更改IP地址为主机实际的IP地址。
获取主机实际的IP地址的方法如下:
在任务栏单击网络图标,单击“打开网络和共享中心”,单击“本地连接,单击“详细信息”,在IPv4地址一栏中,可看到主机实际的IP地址。
2.1.3 连接S7-1200 CPU和PC工作站
在项目树中,双击“设备和网络”,拖曳连接两者的以太网接口。
2.2 创建PLC程序
在项目树中,双击“PLC_1[CPU 1212C DC/DC/Rly]”将其展开,双击“程序块”将其展开,双击“Main[OB1]”,利用指令编辑高位水池上水控制的梯形图。
其中基本指令包括:位逻辑运算、定时器操作、比较操作、数学函数、移动操作、转换操作等11类。仅以“延时接通”指令为例进行介绍,见图2。
当输入IN的逻辑运算结果(RLO)从“0”变为“1”(信号上升沿)时,启动该指令。指令启动时,预设的时间PT即开始计时。超出时间PT之后,输出Q的信号状态将变为“1”。只要启动输入仍为“1”,输出Q就保持置位。启动输入的信号状态从“1”变为“0”时,将复位输出Q。在启动输入检测到新的信号上升沿时,该定时器功能将再次启动。可以在ET输出查询当前的时间值。该定时器值从T#0s开始,在达到持续时间值PT后结束。只要输入IN的信号状态变为“0”,输出ET就复位。每次调用“延时接通”指令,必须将其分配给存储指令数据的IEC定时器。
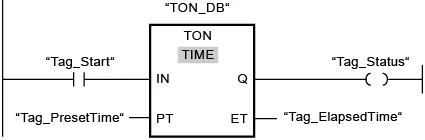
图2 延时接通指令的工作原理
下面,以程序段7为例进行说明,见图3。
支路1~3是与出水压力有关的工况。在电机运行和联锁投用的状态时,支路1表示,当出水压力值在0.45Mpa~0.5Mpa之间波动时,等待40秒,若其仍不能恢复正常则停机;支路2表示,当出水压力值小于0.5Mpa或者大于1.1Mpa时,等待40秒,若其仍不能恢复正常则停机;支路3表示,当出水压力值小于0.4Mpa时,仅等待1秒,然后停机。
支路4是与电机电流有关的工况。在电机运行和联锁投用的状态时,若电机电流值小于40A或大于99A,仅等待1秒,然后停机。
支路5、6是与电机轴承温度有关的工况。在电机运行和联锁投用的状态时,若前轴承温度值大于80℃或者后轴承温度值大于75℃,立即停机。
另外,虽然采集了电机振动值、液位值和流量值,但仅在人机画面中做显示之用,未参与联锁跳停控制,后期可根据现场需要,随时加入。
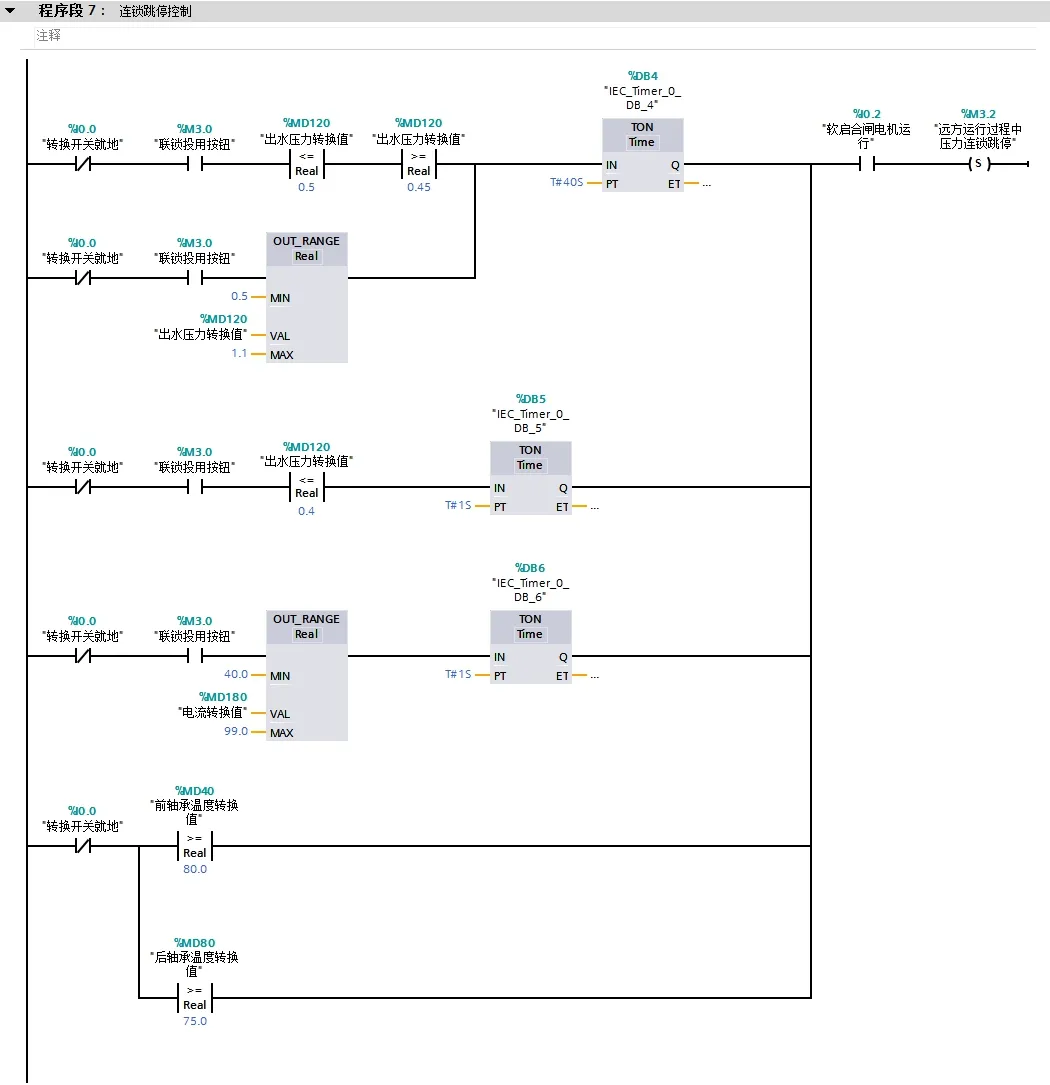
图3 联锁跳停控制
2.3 组态工艺对象
这是博途的运动控制功能,可帮助用户控制步进电机和伺服电机。由于本实例不涉及,仅此提出,读者可自行研究。
2.4 组态HMI画面
在WinCC中,可以创建操作员用来控制和监视机器设备和工厂的画面。创建画面时,为用户在显示过程、创建设备图像和定义过程值方面提供支持。
在项目树中,双击“HMI_RT_1[WinCC RT Advanced]”将其展开,双击“运行系统设置”,将屏幕分辨率设置为1920×1080,双击“画面”将其展开,双击“添加新画面”,利用工具箱中的基本对象、元素和控件等编辑运行系统人机界面。见图4。

图4 运行系统人机界面
2.5 在线与诊断
2.5.1 配置PG/PC接口
如果通过不同子网连接项目的设备,则会将合适的网络访问分配到每个PG/PC接口,以建立到目标系统的在线连接。
单击“开始”,单击“控制面板”,查看方式为图标时,单击“设置PG/PC接口(32位)”,在“为使用的接口分配参数(P)”中,选择“主机网卡型号.TCPIP.1”,确定。
2.5.2 使用S7-PLCSIM进行设备仿真
可使用博途软件,在仿真环境下运行和测试项目的硬件和软件,而无需附加硬件。用户可以在一个图形用户界面来监视和更改组态。
在项目树中,单击“PLC_1[CPU 1212C DC/DC/Rly]”,单击工具栏的“开始仿真”按钮,单击“确定”,单击“下载”,单击“装载”,单击“无动作”,选择“启动模块”,单击“完成”。
在项目树中,单击“HMI_RT_1[WinCC RT Advanced]”,单击工具栏的“开始仿真”按钮,后续操作同上。
此时,弹出仿真的运行系统人机界面,见图4。用户可在其中进行模拟操作,以验证和测试项目的功能。
3 应用思考
3.1 视频监控的问题
本实例中,因现场不需要视频监控,没有采购摄像头。但组态画面时,仍利用控件中的摄像头视图预留了位置,可在以后扩展;并预留了视频监控的切换按钮,以节省主机资源。
另外,若因许可证等不可预知的原因,不能使用摄像头视图时,可以采购支持浏览器访问的网络摄像头,在WINCC画面里调用HTML浏览器,不失为一种可行的方法。
3.2 远控设备参与集成的问题
随着远程控制设备的普及,利用互联网、APP和手机,即可进行开关量的远程操作,对于一些简单设备的操作,甚至自动化控制,省去了组网的麻烦和费用。
3.3 多台设备组网的问题
在已组网的范围内,应积极考虑用一台主机对多台小型设备集中控制,以充分利用软、硬件资源。
4 结语
本次高位水池远程集控自动化上水系统投用以来,运行效果良好,在减少人员、降低维护量和提高劳动效率方面有较大意义。特别是矿山井下供风、排水、通风等生产辅助系统较多,且分布分散,若按岗设员,势必有很大的人力成本。采用远程集控自动化系统后,可以集中监视和控制,配以点检定修,在自动化率、设备完好率上会有很大提升。在互联网、大数据和人工智能时代,全集成自动化软、硬件的应用已遍地开花。相关领域的专业工程技术人员,有必要掌握和应用好这一技术。受专业知识和经验所限,本文涉及的内容尚属浅显,抛砖引玉,挂一漏万,希望能起到打开思路、找到途径的作用。
猜你喜欢
西安石油大学学报(自然科学版)(2022年5期)2022-10-08
河北农机(2020年10期)2020-12-14
铁道通信信号(2020年11期)2020-02-07
电机与控制学报(2018年9期)2018-05-14
凿岩机械气动工具(2017年2期)2017-07-19
科技与创新(2017年7期)2017-05-13
科学中国人(2017年14期)2017-01-28
汽车维修技师(2016年11期)2016-05-05
中国铸造装备与技术(2015年5期)2015-12-10
凿岩机械气动工具(2015年3期)2015-11-11
