
基于改进SSD的柑橘实时分类检测
2019-03-05 01:11:26李善军胡定一高淑敏林家豪安小松
农业工程学报 2019年24期
李善军,胡定一,高淑敏,林家豪,安小松,朱 明
基于改进SSD的柑橘实时分类检测
李善军1,2,3,4,5,胡定一1,2,高淑敏1,2,林家豪1,2,安小松1,2,朱 明1,2※
(1. 华中农业大学工学院,武汉 430070;2. 农业农村部长江中下游农业装备重点实验室,武汉 430070;3. 国家现代农业(柑橘)产业技术体系,武汉 430070;4. 国家柑橘保鲜技术研发专业中心,武汉 430070;5. 农业农村部柑橘全程机械化科研基地,武汉 430070)
针对人工分拣柑橘过程中,检测表面缺陷费时费力的问题,该文提出了一种基于改进SSD深度学习模型的柑橘实时分类检测方法。在经改装的自制打蜡机试验台架下采集单幅图像含有多类多个柑橘的样本2 500张,随机选取其中2 000张为训练集,500张为测试集,在数据集中共有正常柑橘19 507个,表皮病变柑橘9 097个,机械损伤柑橘4 327个。该方法通过单阶段检测模型SSD-ResNet18对图片进行计算和预测,并返回图中柑橘的位置与类别,以此实现柑橘的分类检测。以平均精度AP(average precision)的均值mAP(mean average precision)作为精度指标,平均检测时间作为速度指标,在使用不同特征图、不同分辨率和ResNet18、MobileNetV3、ESPNetV2、VoVNet39等4种不同特征提取网络时,进行模型分类检测效果对比试验研究。研究表明,该模型使用C4、C5特征图,768×768像素的分辨率较为合适,特征提取网络ResNet18在检测速度上存在明显优势,最终该模型的mAP达到87.89%,比原SSD的87.55%高出0.34个百分点,平均检测时间为20.27 ms,相较于原SSD的108.83 ms,检测耗时降低了436.90%。该模型可以同时对多类多个柑橘进行实时分类检测,可为自动化生产线上分拣表面缺陷柑橘的识别方面提供技术借鉴。
目标识别;模型;无损检测;柑橘;表面缺陷;深度学习;SSD;ResNet18
0 引 言
水果品质分级是水果加工生产线的重要环节,分级得当可以创造更多的经济价值,而水果的表面缺陷情况是影响水果品质的重要指标之一[1]。但目前筛除表面有缺陷水果的工作多以人工为主,工作量大且耗费人力、财力。因此,实现水果的自动化分类检测具有重要的意义。
目前,国内外学者运用多种方法对水果进行表面缺陷识别。李江波等[2]通过建立照度-反射模型对脐橙表面缺陷进行检测,总体正确率超过99%。赵杰文等[3]利用支持向量机识别缺陷红枣,识别准确率达到96.2%。章海亮等[4]应用高光谱成像技术对柑橘缺陷进行无损检测,识别率达到94%。Dong等[5]提出了一种基于高光谱成像技术结合主成分分析法和B-样条光照校正技术的方法对柑橘缺陷进行检测,准确率达96.5%。Zou等[6]建立了1个由3台彩色相机组成的系统,从不同角度拍摄了9张苹果的照片,通过判断是否有1张照片中的感兴趣区域超过1个来识别表面缺陷的苹果,误分率为4.2%。Sharif等[7]通过优化加权分割和特征选择,选出最优特征,然后将选中的特征输入多类支持向量机进行最终的柑橘病变类型的分类,该方法在其综合数据集上准确率为89%。
上述水果缺陷识别方法存在样本较小问题,且通常只能一次识别单个水果,识别效率不高。而近年来快速发展的深度学习技术可以较好的解决这些问题。国内外学者也对基于深度学习的农业检测方向做了相关研究,其方法主要分为语义分割[8-10]、目标检测[11-17]、实例分割[18-20]3种。赵德安等[21]使用YOLO模型对复杂背景下的苹果进行定位,其平均精度(AP,average precision)的均值(mAP,mean average precision)为87.71%,检测视频的帧率达到60帧/s。王丹丹等[22]利用R-FCN深度学习模型对疏果前期的苹果进行目标识别,误识率为4.9%,处理一张图像的平均速度为0.187 s。Dias等[23]以苹果花朵为研究对象,构建了一种深度学习模型,实现了对苹果花朵的实例分割。Tian等[24]通过改进的YOLO-V3模型检测不同生长阶段的苹果,F1值达到81.7%。
本文提出一种基于SSD深度学习模型的采后柑橘实时分类检测方法,利用该模型可达到同时识别多类多个柑橘的目的,为实现生产线上实时分拣有缺陷柑橘提供技术支持。
1 材料与方法
1.1 数据采集及分类
本文试验所采用的柑橘品种为纽荷尔,采集于宜昌市秭归县柑橘果园,相机使用小米8SE 1200万像素的后置摄像头,于自然光照条件下,模拟产线背景,在经改装的小型打蜡机上拍摄,在打蜡机上方固定相机,采取俯视视角拍摄,图1为图像采集装置示意图。每次拍摄前在打蜡机的滚筒间放置数量不等的柑橘,之后滚轮以0.72 r/s的转速自动旋转,以此带动柑橘的旋转;相机每隔1秒拍摄1张照片,因此在柑橘旋转过程中可拍摄到柑橘的不同位面,以此获取更加全面的数据信息,增加数据量,拍摄到的图像分辨率为2 448×2 448像素,共拍摄图像样本2 500张,拍摄图像示例如图2所示。
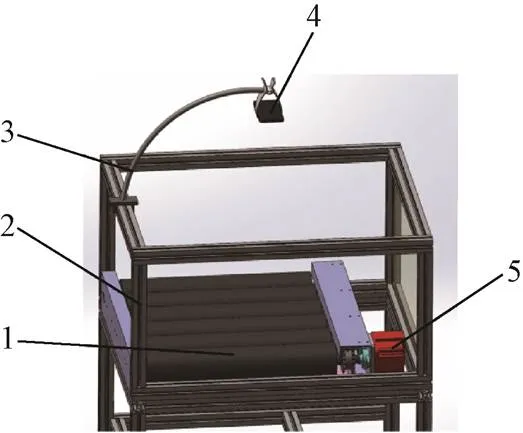
1.滚筒 2.框架 3.手机固定夹具 4.高清手机 5.电机

图2 图像样本示例
本文将柑橘分为3类,分别为正常柑橘、表皮病变柑橘、机械损伤柑橘。正常柑橘表皮基本无病变斑纹,可进行正常贩卖;表皮病变柑橘多有病变斑纹,其外观受到损伤,但大部分该类柑橘内质并未受到损坏,通常可贩卖给榨汁厂与罐头厂进行加工,存在一定价值;机械损伤柑橘为表皮已破裂柑橘,该类柑橘极易腐烂,通常会被丢弃,不存在价值。图3为3类柑橘示意图。

a. 正常b. 表皮病变c. 机械损伤 a. Normalb. Skin lesionsc. Mechanical damage
1.2 生成数据集及其预处理
本文试验在2 500张图像样本中随机挑选2 000张作为训练集,剩余500张作为测试集,在2 500张图像样本中各类柑橘数量的信息如表1所示。
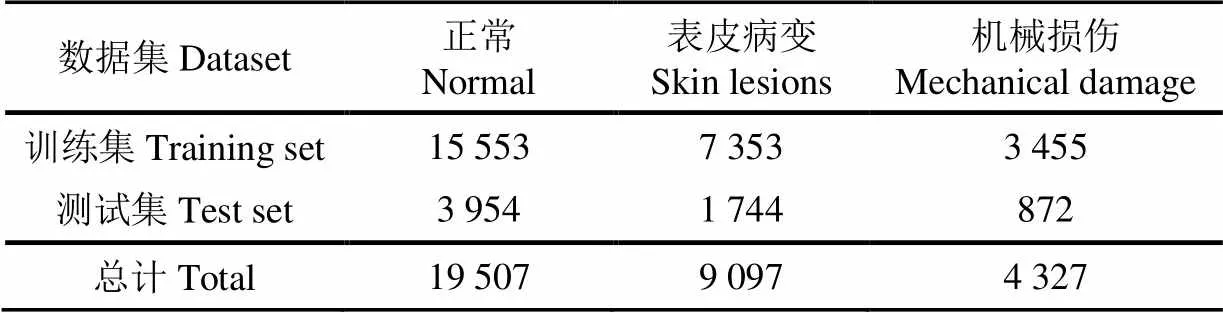
表1 柑橘数据集种类及其数量
本文使用LabelImg对图像样本进行标定,采用COCO数据集格式。在标定时,部分柑橘可能既存在表皮病变,又存在机械损伤,对于该类柑橘将其标定为机械损伤柑橘;为增加训练后模型的容错率,对于柑橘表皮病变或裂纹特征不明显的,如只在柑橘边缘处有少量裂纹或病变特征的柑橘,此类柑橘将被标定为正常柑橘。
为了提高训练效果,使模型的泛化性得以提升,对数据集使用数据增强方法。鉴于柑橘更换不同方向角度观察都不会改变其特征的特点,本文使用水平翻转与垂直翻转2种数据增强方法。
1.3 试验平台
本文试验基于Windows10操作系统,GPU为 GeForce GTX 1060(6 GB显存),处理器为Inter(R) Core(TM) i5-8500 CPU@3.00GHz,运行内存为16 G。模型的搭建与训练验证通过Python语言实现,基于PyTorch深度学习框架,并行计算框架使用CUDA 10.1版本。
2 柑橘分类检测模型与评价指标
2.1 SSD-ResNet18模型
SSD[25]是深度学习目标检测中经典且有效的单阶段检测模型,其首先通过特征提取网络(backbone)得到特征图(feature map),再从特征图中预测出众多的边界框,最后通过非极大值抑制(non-maximum suppression)最终确定图像中物体的类别与位置。SSD训练时输入的图像分辨率一般为300×300像素或512×512像素,本文中后续与原SSD模型相关的试验都选用512×512像素的图像分辨率。
2.1.1 ResNet18特征提取网络
原SSD模型以VGG16[26]作为特征提取网络,但VGG16网络参数量庞大,计算速度缓慢,无法达到生产线上实时分类检测柑橘的要求。因此本文将SSD的特征提取网络更改为ResNet18深度残差网络,该网络仅有18层,且具有更快的计算速度,其浮点计算量仅为VGG16网络的1/10[27],这样可以更好满足实时分类检测柑橘的要求,且训练时可以使模型更快地收敛,从而减少训练时间。
2.1.2 特征图选取
通过特征提取网络得到的特征图通常会选择每次下采样后,下次下采样前的一层所得到的结果。本文以代表在网络第次下采样后所得到的特征图,如第1次下采样后所得到的特征图就称为1,在现阶段的特征提取网络中一般都会选择3、4、5这3个特征图。在目标检测模型中,对于不同的特征图会先安排固定类型的先检框(Anchor),通常为每个特征图3种。本文使用-means聚类算法设置=9,通过2 500张数据集中的手动标框得到9种不同的先检框,其相对百分比范围为0.084 5~0.151 1,若以768×768像素的分辨率为例,则其先检框的尺寸范围为64.90~116.04像素,但3的有效感受野(Effective receptive field)一般为32,而4为64,5为128[28],所以3特征图并不一定适用于本课题的柑橘的分类检测。因此,本文选取4、5这2个特征图,并使用-means聚类算法重新得到6种不同的先检框,分别应用于4、5。SSD-ResNet18的模型结构如图4所示。
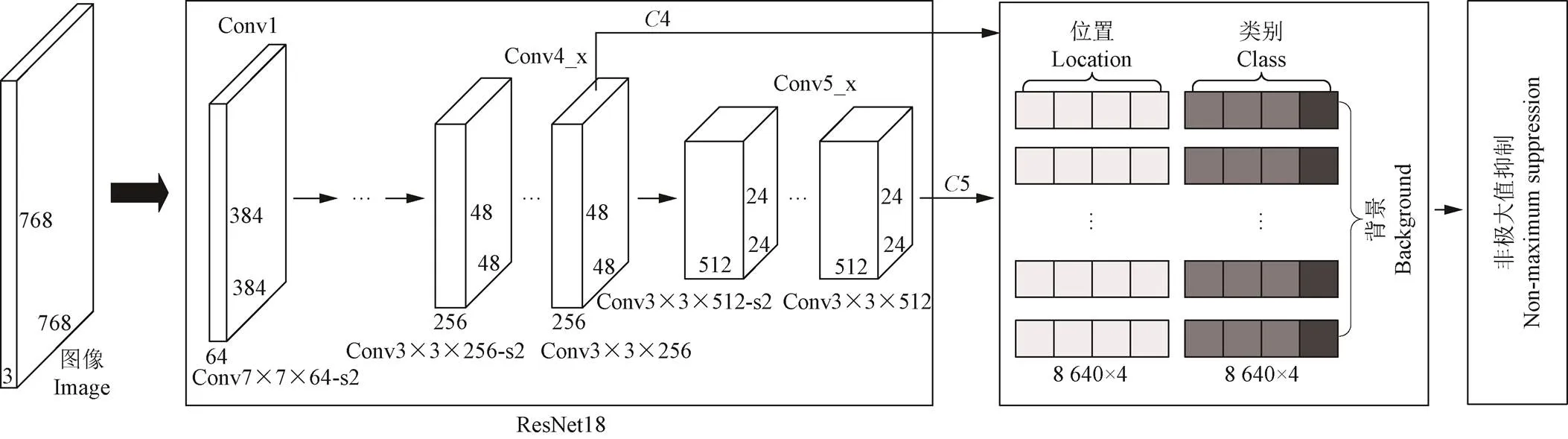
图4 SSD-ResNet18模型结构
2.2 损失函数
SSD-ResNet18模型训练时所使用的损失函数由置信度损失(L)和位置损失组成(L),其公式为

2.3 评价指标
本文采用mAP作为模型的检测精度的评价指标,AP作为每一类别的检测精度的评价指标。mAP和AP与准确率(precision,)、召回率(recall,)有关,准确率和召回率的计算公式如下

式中TP代表被正确划分到正样本的数量,FP代表被错误划分到正样本的数量,FN代表被错误划分到负样本的数量。
通过计算所得准确率与召回率可以绘制出准确率—召回率曲线,该曲线以召回率为横坐标,以准确率为纵坐标,代表某一类别的准确率与召回率情况,而AP则是对该曲线进行积分所得,其积分公式为

mAP则为所有类别AP的平均值,其公式为
式中代表类别总数,AP()代表第类的AP值。
速度评估指标采用模型检测一幅图所耗费的平均时间,即平均检测时间,单位为ms。
3 模型训练
为加快模型训练收敛速度和提高模型训练效果,本文所搭建的所有模型都加载了基于ImageNet的预训练参数。在模型的训练过程中,优化器使用SGD(stochastic gradient descent)[29]算法,batch_size设置为12,动量(momentum)设置为0.9,初始学习率(learning rate)设置为0.001,学习率调度器为余弦学习率衰减(cosine decay)[29],权重衰减系数(weight decay)设置为0.000 1,训练50个大循环(epoch)。由于本文训练使用余弦学习率衰减,学习率在最后会下降到0,因此在训练期间损失值会不断下降,在训练后期,模型的精度变化会趋于平稳,所以在训练结束后使用最后保存的模型,即第50次大循环所得的模型,在测试集上进行进一步的验证分析。图5为在训练过程中原SSD与SSD-ResNet18的训练损失与测试集mAP。
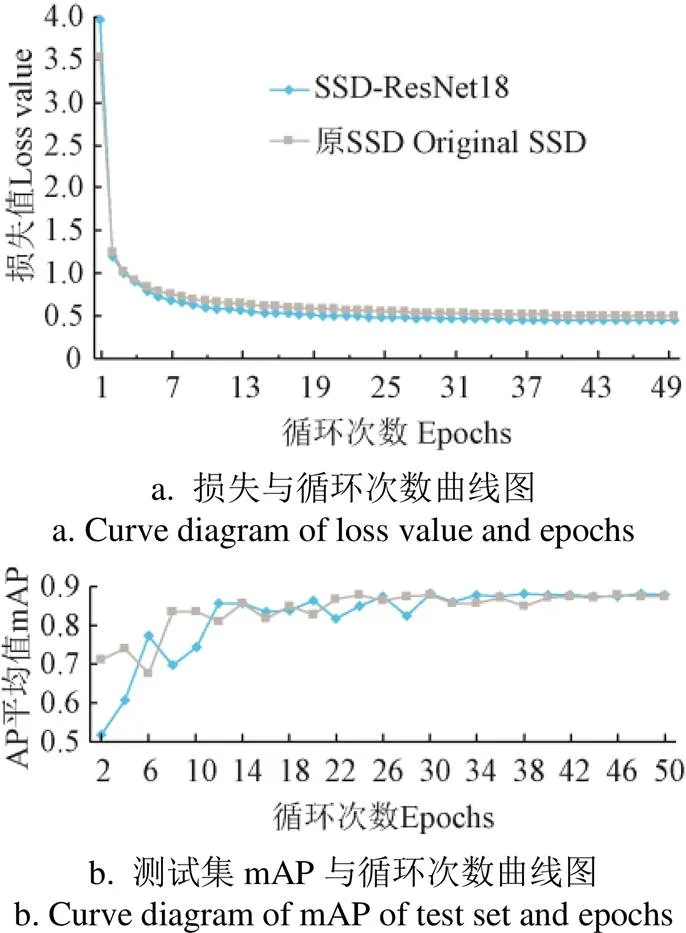
图5 原SSD与SSD-ResNet18训练损失和测试集Map
4 结果与分析
4.1 不同特征图对模型分类检测效果的影响
从上文可知特征图3不一定适用于SSD-ResNet18模型检测本文的柑橘数据集,本文对用3、4、5特征图的试验结果进行比较研究,结果如表2所示。不使用3的模型的mAP比使用3的模型高出4.2个百分点,平均检测时间比其少1ms,这可能是因为3设置了符合橘子尺寸的先检框后,有一部分柑橘会被分配到3进行检测,而3的有效感受野仅为32,无法有效地检测到整个柑橘的特征,因而会造成误判,所以去除掉3后,mAP有明显提升,而且减少了模型的计算量,检测速度也得到了一定的提升。

表2 使用不同特征图的试验结果
4.2 不同分辨率对模型分类检测效果的影响
选择较为合适的分辨率进行训练,有利于模型分类检测效果的提升,本文分别选取512×512像素,640×640像素,768×768像素,896×896像素,1 024×1 024像素5种分辨率进行对比试验,结果如表3所示。从表3可以看出,分辨率从512×512像素提升至768×768像素时,虽然模型的平均检测时间增加了7.33 ms,但mAP增长了2.28个百分点,有明显提升。而分辨率从768×768像素提升至1 024×1 024像素的过程中mAP已在88%上下波动,变化很小,且平均检测时间增加10.04 ms,说明此时分辨率的增加已经没有意义。综合来看,768×768像素的分辨率比较适合该模型。
4.3 各类柑橘的分类检测效果
将测试集在以768×768像素为分辨率,使用4、5特征图的SSD-ResNet18模型与原SSD模型上分别进行测试,得到两种模型对各类柑橘的分类检测效果,结果如表4所示。原SSD与SSD-ResNet18的mAP相差不多,但SSD-ResNet18的检测时间却是原SSD的1/5,而且对于机械损伤类别的柑橘其AP值比原SSD的高出1.56个百分点,说明SSD-ResNet18对于该类柑橘的分类检测效果相比于原SSD有了一定的提升。另外,两种模型对于正常柑橘的识别效果最好,对于机械损伤的柑橘识别效果最差,这应该与各类柑橘在数据集中的数据量有关。若增加表皮病变与机械损伤这2类柑橘的数据量或者实现对柑橘个体的目标追踪,通过柑橘各个位面的表皮信息进行综合判定,可能可以进一步地提升模型的识别效果,特别是对于病变与损伤的柑橘。
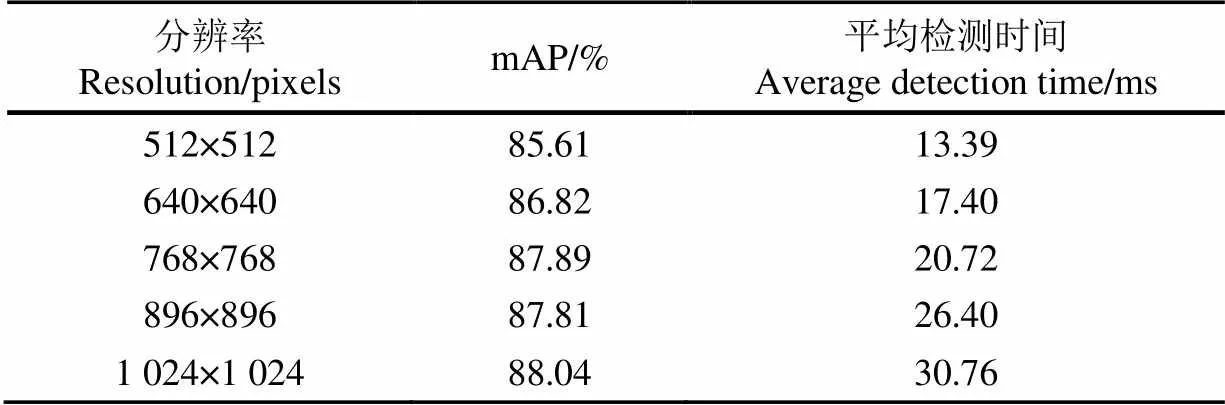
表3 不同分辨率的分类检测效果对比
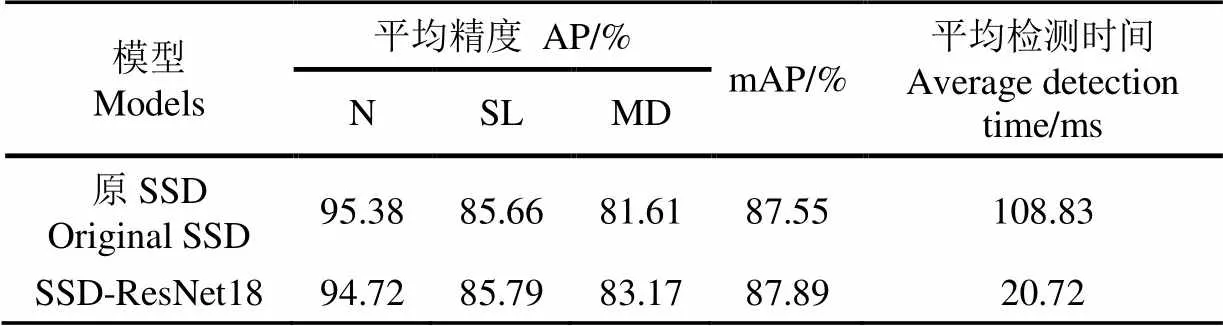
表4 原SSD与SSD-ResNet18的分类检测结果
注:N:正常;SL:表皮病变;MD:机械损伤
Note: N: Normal; SL: Skin lesions; MD: Mechanical damage
图6为2种模型分类检测的具体效果。从图6可以看出,2种模型对于柑橘位置的识别都非常准确,没有出现漏检柑橘的情况。对于分类情况,SSD-ResNet18与原SSD效果也相差不多,分类正确率较高,而且随着1张图中柑橘数目的增多,2种模型的误检率并没有上升,说明2种模型均有较好的分类效果。
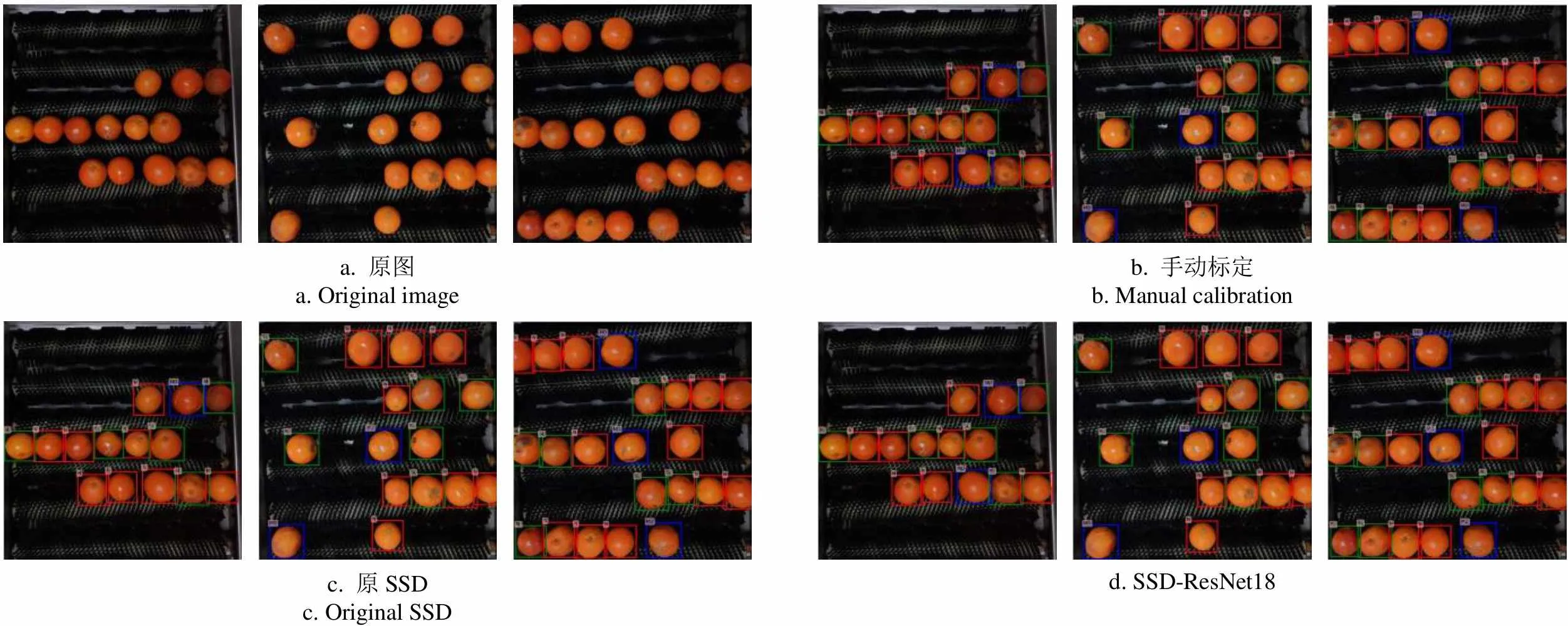
a. 原图 a. Original imageb. 手动标定 b. Manual calibration c. 原SSD c. Original SSDd. SSD-ResNet18
4.4 不同特征提取网络的分类检测效果对比
MobileNetV3[30]、ESPNetV2[31]、VoVNet39[32]是当前阶段优秀的特征提取网络。其中MobileNetV3与ESPNetV2为轻量级网络,参数量少,适合应用于移动端;VoVNet39为重量级网络,层数较多,参数量大,对复杂困难的分类检测问题有较好的效果。本文在保证模型其他部分不改动的情况下,分别更换了这3种特征提取网络与ResNet18进行分类检测效果的对比试验,结果如表 5所示。通过4种特征提取网络所得的mAP差别很小,说明在分类检测的精准度上,4种特征提取网络的效果相近,但在检测时间上,ResNet18优于其他的特征提取网络,比MobileNetV3快10.52 ms,比ESPNetV2快16.78 ms,比VoVNet39快36.76 ms,说明ResNet18在提升实时检测的速度上有明显优势。
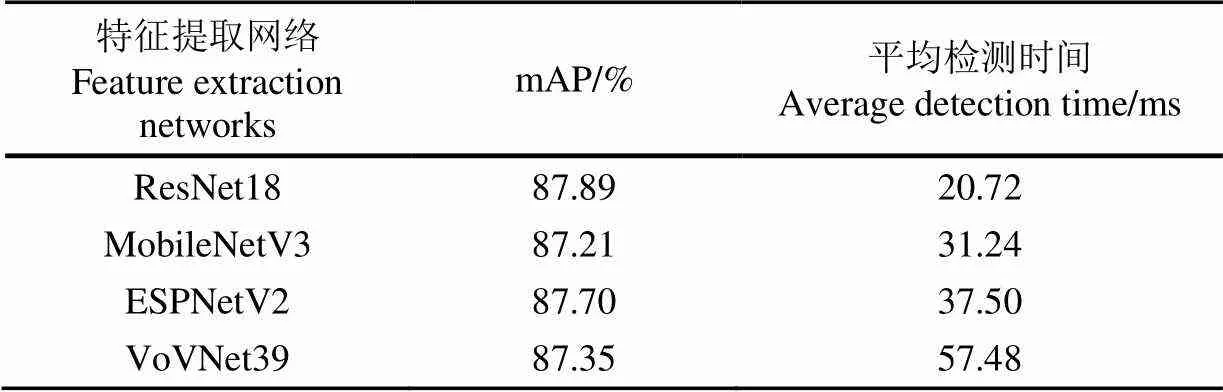
表5 4种特征提取网络的效果对比
5 结 论
本文提出了一种基于SSD-ResNet18深度学习模型的柑橘生产线实时分类检测方法。可区分正常柑橘、表皮病变柑橘、机械损伤柑橘。本文选取浮点计算量少的ResNet18作为特征提取网络,加快了模型的检测速度,使用C4、C5特征图进行预测,同时调整数据集分辨率为768×768像素,增加了模型的分类检测精度。最终本文模型的mAP达到87.89%,平均检测时间为20.72 ms。与原SSD模型相比,分类检测精度相近,但平均检测时间减少了88.11ms,检测速度明显提高。该模型有较高的分类检测精度,检测速度提高明显,从而为生产线上自动化分拣表面缺陷柑橘提供参考。
[1]应义斌,饶秀勤,赵匀,等. 机器视觉技术在农产品品质自动识别中的应用(Ⅰ)[J]. 农业工程学报,2000,16(1):103-108. Ying Yibin, Rao Xiuqin, Zhao Yun, et al. Application of machine vision technique to quality automatic identification of agricultural products(Ⅰ)[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2000, 16(1): 103-108. (in Chinese with English abstract)
[2]李江波,饶秀勤,应义斌. 基于照度-反射模型的脐橙表面缺陷检测[J]. 农业工程学报,2011,27(7):338-342. Li Jiangbo, Rao Xiuqin, Ying Yibin, et al. Detection of navel surface defects based on illumination-reflectance model[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2011, 27(7): 338-342. (in Chinese with English abstract)
[3]赵杰文,刘少鹏,邹小波,等. 基于支持向量机的缺陷红枣机器视觉识别[J]. 农业机械学报,2008,39(3):113-115. Zhao Jiewen, Liu Shaopeng, Zou Xiaobo, et al. Recognition of defect chinese dates by machine vision and support vector machine[J]. Transactions of the Chinese Society for Agricultural Machinery, 2008, 39(3): 113-115. (in Chinese with English abstract)
[4]章海亮,高俊峰,何勇. 基于高光谱成像技术的柑橘缺陷无损检测[J]. 农业机械学报,2013,44(9):177-181. Zhang Hailiang, Gao Junfeng, He Yong. Nondestructive detection of citrus defection using hyper-spectra imaging technology[J]. Transactions of the Chinese Society for Agricultural Machinery, 2013, 44(9): 177-181. (in Chinese with English abstract)
[5]Dong C, Yang Y, Zhang J, et al. Detection of thrips defect on green-peel citrus using hyperspectral imaging technology combining PCA and B-spline lighting correction method[J].Journal of Integrative Agriculture, 2014, 13(10): 2229- 2235.
[6]Zou X B, Zhao J W, Li Y X, et al. In-line detection of apple defects using three color cameras system[J]. Computers and Electronics in Agriculture, 2010, 70(1): 129-134.
[7]Sharif M, Khan M A, Iqbal Z, et al. Detection and classification of citrus diseases in agriculture based on optimized weighted segmentation and feature selection[J].Computers and Electronics in Agriculture, 2018, 150: 220-234.
[8]Long J, Shelhamer E, Darrell T. Fully convolutional networks for semantic segmentation[C]//Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition. 2015: 3431-3440.
[9]Kestur R, Meduri A, Narasipura O. MangoNet: A deep semantic segmentation architecture for a method to detect and count mangoes in an open orchard[J]. Engineering Applications of Artificial Intelligence, 2019, 77: 59-69.
[10]Li Y, Cao Z, Lu H, et al. In-field cotton detection via region-based semantic image segmentation[J]. Computers and Electronics in Agriculture, 2016, 127: 475-486.
[11]Ren S, He K, Girshick R, et al. Faster R-CNN: Towards real-time object detection with region proposal networks[C]//Advances in Neural Information Processing Systems. 2015: 91-99.
[12]Redmon J, Divvala S, Girshick R, et al. You only look once: Unified, real-time object detection[C]//Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition. 2016: 779-788.
[13]孙哲,张春龙,葛鲁镇,等. 基于Faster R-CNN的田间西兰花幼苗图像检测方法[J]. 农业机械学报,2019,50(7):216-221. Sun Zhe, Zhang Chunlong, Ge Luzhen, et al. Image detection method for broccoli seedlings in fieldbased on Faster R-CNN[J]. Transactions of the Chinese Society for Agricultural Machinery, 2019, 50(7): 216-221. (in Chinese with English abstract)
[14]刘慧,张礼帅,沈跃,等. 基于改进SSD的果园行人实时检测方法[J]. 农业机械学报,2019,50(4):29-35. Liu Hui, Zhang Lishuai, Shen Yue, et al. Real-time pedestrian detection in orchard based on improved SSD[J]. Transactions of the Chinese Society for Agricultural Machinery, 2019, 50(4): 29-35. (in Chinese with English abstract)
[15]毕松,高峰,陈俊文,等. 基于深度卷积神经网络的柑橘目标识别方法[J]. 农业机械学报,2019,50(5):181-186. Bi Song, Gao Feng, Chen Junwen, et al. Detection method of citrus based on deep convolution neural network[J]. Transactions of the Chinese Society for Agricultural Machinery, 2019, 50(5): 181-186. (in Chinese with English abstract)
[16]Tian Yunong, Yang Guodong, Wang Zhe, et al. Detection of apple lesions in orchards based on deep learning methods of CycleGAN and YOLOV3-Dense[J]. Journal of Sensors, 2019: 1-13.
[17]彭红星,黄博,邵园园,等. 自然环境下多类水果采摘目标识别的通用改进SSD模型[J]. 农业工程学报,2018,34(16):155-162. Peng Hongxing, Huang Bo, Shao Yuanyuan, et al. General improved SSD model for picking object recognition of multiple fruits in natural environment[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2018, 34(16): 155-162. (in Chinese with English abstract)
[18]He K, Gkioxari G, Dollár P, et al. Mask R-CNN[C]//Proceedings of the IEEE International Conference on Computer Vision. 2017: 2961-2969.
[19]Qiao Y, Truman M, Sukkarieh S. Cattle segmentation and contour extraction based on Mask R-CNN for precision livestock farming[J]. Computers and Electronics in Agriculture, 2019, 165: 1-9.
[20]高云,郭继亮,黎煊,等. 基于深度学习的群猪图像实例分割方法[J]. 农业机械学报,2019,50(4):186-194. Gao Yun, Guo Jiliang, Li Xuan, et al. Instance-level segmentation method for group pig images based on deep learning[J]. Transactions of the Chinese Society for Agricultural Machinery, 2019, 50(4): 186-194. (in Chinese with English abstract)
[21]赵德安,吴任迪,刘晓洋,等. 基于YOLO深度卷积神经网络的复杂背景下机器人采摘苹果定位[J]. 农业工程学报,2019,35(3):164-173. Zhao Dean, Wu Rendi, Liu Xiaoyang, et al. Apple positioning based on YOLO deep convolutional neural network for picking robot in complex background[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2019, 35(3): 164-173. (in Chinese with English abstract)
[22]王丹丹,何东健. 基于R-FCN深度卷积神经网络的机器人疏果前苹果目标的识别[J]. 农业工程学报,2019,35(3):156-163. Wang Dandan, He Dongjian. Recognition of apple targets before fruits thinning by robot based on R-FCN deep convolution neural network[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2019, 35(3): 156-163. (in Chinese with English abstract)
[23]Dias P A, Tabb A, Medeiros H. Apple flower detection using deep convolutional networks[J]. Computers in Industry, 2018, 99: 17-28.
[24]Tian Y, Yang G, Wang Z, et al. Apple detection during different growth stages in orchards using the improved YOLO-V3 model[J]. ComputersandElectronicsinAgriculture, 2019, 157: 417-426.
[25]Liu W, Anguelov D, Erhan D, et al. SSD: Single shot multibox detector[C]//European Conference on Computer Vision. 2016: 21-37.
[26]Simonyan K, Zisserman A. Very deep convolutional networks for large-scale image recognition[J]. arXiv: 2014, 1409. 1556v6.
[27]He K, Zhang X, Ren S, et al. Deep residual learning for image recognition[C]//IEEE Conference on Computer Vision and Pattern Recognition, 2016: 770-778.
[28]ZhangS, ZhuX, LeiZ, etal. S3fd: Singleshotscale-invariantfacedetector[C]//ProceedingsoftheIEEEInternationalConferenceonComputerVision. 2017: 192-201.
[29]Loshchilov I, Hutter F. SGDR: stochastic gradient descent with warm restarts[J]. arXiv: 2016, 1608. 03983.
[30]Andrew H, Mark S, Grace C, et al. Searching for mobilenetv3[J]. arXiv: 2019, 1905. 02244.
[31]Mehta S, Rastegari M, Shapiro L, et al. Espnetv2: A light-weight, power efficient, and general purpose convolutional neural network[C]//Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition.2019: 9190-9200.
[32]Lee Y, Hwang J, Lee S, et al. An energy and GPU-Computation efficient backbone network for real-time object detection[C]//Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition Workshops.2019.
Real-time classification and detection of citrus based on improved single short multibox detecter
Li Shanjun1,2,3,4,5, Hu Dingyi1,2, Gao Shumin1,2, Lin Jiahao1,2, An Xiaosong1,2, Zhu Ming1,2※
(1.,,430070,; 2.-,,430070,; 3.(),430070,; 4.,430070,; 5.,,430070,)
Manually classifying citrus based on its surface defects is tedious and time-consuming and a new real-time method is proposed in this paper based on the improved SSD deep learning model. In the testing bench of the waxing machine, 2 500 images of a variety of citrus species were taken, of which 2 000 were randomly selected as training set and 500 as testing set. Among them, the method classified 19 507 as normal, 9 097 skin defects and 4 327 mechanically damaged. Considering that traditional methods using near-infrared spectra, support vector machines, HSV and RGB color space model are inefficient to detect surface defects of citrus and can only identify one, we proposed an improved method to calculate the image using the one-stage detection model - SSD-ResNet18. The method gets the feature maps through backbone first, and then predicts the number of boundary boxes from the feature maps before determining the location and category of citrus using confidence and non-maximum suppression. This can detect a batch of citrus. In the proposed method, we used the mAP (mean average precision) as the precision index and the mean detection time as the speed index. Optimization in the proposed method was solved using the SGD (stochastic gradient descent) algorithm. The learning scheduler was based on cosine decay, enabling the learning rate to drop to 0 at the end of the training period. This ensures the lost value during the training period to continuously decline. As the model was stable at the end of the training period, it can be saved at the end of the training for further use. While the VGG16 was used as the original SSD backbone, it needs a multitude of parameters and is hence computationally inefficient. We replaced it with the ResNet18, which is approximately 100 times more efficient than the VGG16. An improved feature map was obtained from the analysis of the effective sensory field of different feature maps and the size of citrus in the map, the anchor in which was obtained using the-means clustering algorithm from the manual label box. The suitable image resolution for the proposed model was obtained by comparing images taken at five resolutions: 512×512 pixels, 640×640 pixels, 768×768 pixels, 896×896 pixels and 1024×1024 pixels. The results showed that the accuracy of the mAP of SSD-ResNet18 was 87.89%, improving 0.34 percentage pointshigher than the original SSD. The average detecting time of the SSD-ResNet18 was 20.72 ms, reduced by 436.90% compared to the original SSD's 108.83 ms. The accuracy of the AP of SSD-ResNet18 was 94.72%, 85.79% and 83.17%, respectively, for detecting normal, skin lesion and mechanical damage. We compared MobileNetV3, ESPNetV2, VoVNet39 and ResNet18 as backbones and did not find significant difference between their accuracy, but ResNet18 was 10.52 ms, 16.78 ms and 36.76 ms less than MobileNetV3, ESPNetV2 and VoVNet39 in detection time, respectively. The method proposed in the paper meets the requirement on detecting speed in real-time citrus production lineand can effectively classify and detect a multitude of citrussimultaneously.
object recognition; models; nondestructive detection; citrus; surface defects; deep learning; SSD; ResNet18
李善军,胡定一,高淑敏,林家豪,安小松,朱 明. 基于改进SSD的柑橘实时分类检测[J]. 农业工程学报,2019,35(24):307-313. doi:10.11975/j.issn.1002-6819.2019.24.036 http://www.tcsae.org
Li Shanjun, Hu Dingyi, Gao Shumin, Lin Jiahao, An Xiaosong, Zhu Ming. Real-time classification and detection of citrus based on improved single short multibox detecter[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2019, 35(24): 307-313. (in Chinese with English abstract) doi:10.11975/j.issn.1002-6819.2019.24.036 http://www.tcsae.org
2019-10-06
2019-12-07
现代农业(柑橘)产业技术体系建设专项资金项目(CARS-26);国家重点研发计划(2017YFD0202001);柑橘全程机械化科研基地建设项目(农计发[2017]19号);湖北省农业科技创新行动项目
李善军,副教授,博士,主要从事水果生产机械化技术与智能装备研究。Email:shanjunlee@163.com
朱 明,研究员,博士生导师,主要从事农产品加工与智能农业装备研究。Email:13801392760@163.com
10.11975/j.issn.1002-6819.2019.24.036
TP391.4
A
1002-6819(2019)-24-0307-07
猜你喜欢
基层中医药(2021年10期)2021-06-05 07:15:28
数学物理学报(2019年3期)2019-07-23 01:15:40
电子制作(2018年19期)2018-11-14 02:37:08
家庭影院技术(2018年9期)2018-11-02 05:31:32
自动化学报(2017年5期)2017-05-14 06:20:52
自动化学报(2017年11期)2017-04-04 02:52:58
成都信息工程大学学报(2017年6期)2017-03-16 03:04:32
湖南农业(2016年3期)2016-06-05 09:37:35
浙江柑橘(2016年4期)2016-03-11 20:12:59
湖南农业(2015年5期)2015-02-26 07:32:26
