
某遥感卫星微振动对成像质量影响分析
2019-03-05 01:25庞世伟郭倩蕊
航天器环境工程 2019年1期
庞世伟,郭倩蕊,贺 玮,关 晖,潘 腾
(北京空间飞行器总体设计部,北京 100094)
0 引言
微振动是指航天器在轨运行期间,由于其上设备(如动量轮等高速转动部件、太阳电池阵驱动机构等步进部件、红外相机摆镜等摆动部件等)正常工作时造成的航天器频带较宽、幅度较小的往复运动[1]。
微振动具有微小性、固有性和难控性。1)微小性是指微振动能量小。与发射段相比,微振动导致的应变至少小1个量级,不会造成结构破坏。这是很多航天器设计忽略其影响的原因。2)固有性是指微振动是由微振动源正常工作引起的,是微振动源的固有特性。除非不使用该类微振动源,否则微振动影响始终存在。3)难控性是指微振动幅值小、频带宽,姿态控制系统难以测量,无法通过单一手段进行全频段控制,通常需要多种手段组合,必要时还要引入地面处理。
随着分辨率等性能指标要求越来越高,光学相机等敏感设备对微振动的敏感度也不断增加。微振动对成像质量的影响渐已成为制约高分辨率遥感卫星等高性能航天器成败的关键因素[2-7]。
如果以1 m分辨率作为判定是否为高分辨率的界限,某型号卫星是我国第一颗民用高分辨率对地观测传输型遥感卫星。该卫星搭载的光学相机焦距达7.8 m,星下点地面像元分辨率优于1 m。长焦距和高分辨率决定了该相机对卫星微振动环境更加敏感,必须通过仿真分析和试验验证手段确定微振动对图像质量的影响程度,决定是否采取必要措施以保证型号任务圆满完成。
1 微振动源分析
根据卫星设计方案,星上存在的微振动源主要为动量轮(RW)、控制力矩陀螺(CMG)、太阳电池阵驱动机构(SADA)和数传天线。
该卫星上装有4个RW和3个CMG,均位于动量轮安装板上,安装板则位于卫星中心承力筒内底部端框上。该卫星共有2个太阳电池阵,2个SADA分别安装在服务舱+Y和-Y顶板上,在卫星飞行过程中驱动太阳电池阵绕星体y轴旋转,以有效实现太阳电池阵对日定向。该卫星共有2个数传天线组件,都安装在载荷舱+Y舱顶板上,每个天线均可分别绕星体x轴和y轴双自由度转动,以实现高效数据对地传输。
根据前期地面试验结果,上述微振动源能量较小。如图1所示,在目前工作转速下,RW对其安装面的最大扰动力<5 N,扰动力矩<0.5 N·m;CMG由于转速高,扰动相对较大,对其安装面的最大扰动力可达25 N,最大扰动力矩可达3.5 N·m。SADA和数传天线在有无负载情况下微振动差别很大,由于地面试验条件限制,对这两类微振动源现在还没有比较可靠的试验数据,但从一些模拟负载试验情况看,因为其转速远低于RW和CMG,所以其扰动力和扰动力矩明显小于RW和CMG的。上述微振动源的覆盖频率范围均很宽,在目前工作转速下:RW主要扰动频率包括33、67、100、140和220 Hz等,还有较强的宽带噪声;CMG主要扰动频率包括100、120、180、200、300 Hz等;SADA 和数传天线的微振动能量主要集中在0.2~20 Hz低频段内。由于微振动幅值小、频率范围宽,所以控制系统难以测量和控制,仅能对其控制带宽(<0.1 Hz)内的微振动成分有一定抑制作用,无法覆盖其他频段。根据目前认识水平,微振动及其通过结构传递主要影响该卫星上相对敏感的光学设备,对其他设备工作无影响[8-10]。
SADA产生微振动的主要原因有两个:一是在SADA驱动太阳电池阵转动时,由于太阳电池阵的质心不在其转动轴线上,导致扰动力和扰动力矩的产生;二是SADA的电机为步进电机,在步进过程中引入类似脉冲的激励,激励太阳电池阵振动从而给整星带来影响。
数传天线的微振动产生原理与SADA的类似,主要差别在于:SADA是单轴单自由度转动,数传天线是双轴双自由度转动。总的来讲,太阳电池阵基频较低,因此其微振动主要频率分量的低频部分多些,而数传天线的高频部分相对多些。
在后面微振动对图像质量的影响分析中:RW和CMG微振动使用地面实测结果;而由于SADA和数传天线微振动的地面实测很困难,故以数值仿真结果代替。
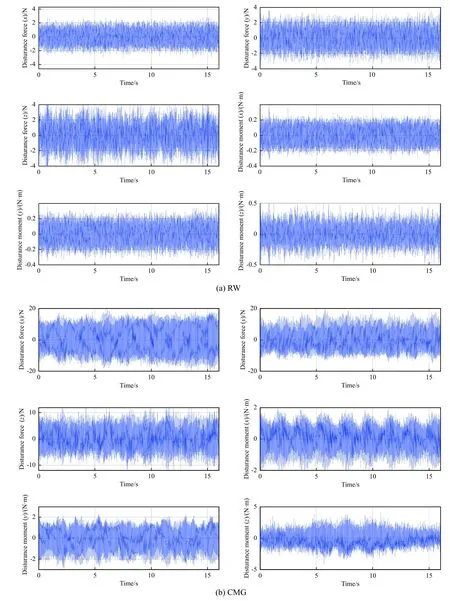
图1 RW和CMG的扰动力和扰动力矩Fig.1 The force and moment of disturbance of a RW and a CMG
2 微振动传递分析
2.1 结构系统模型
采用有限元分析方法进行结构响应分析。有限元法描述的卫星动力学模型[11]为



式中:qs为状态空间模型的状态向量;I为单位阵;Ω和Z分别为以式(2)中的λr(r=1,··,n)和ςr(r=1,··,n)为对角元素的固有频率矩阵和阻尼矩阵;y为和姿态相关的响应输出;z为敏感载荷的性能输出;βu和βw分别为控制和微振动输入的参与因子;Cyx和分别为和姿态相关的位移和速度的输出参与因子;Czx和分别为和敏感载荷相关的位移和速度的输出参与因子;u为结构传递模型中的控制输入;w为结构传递模型中的微振动输入;As、Bu、Bw、Cy、Dyu、Dyw、Cz、Dzu、Dzw分别为各对应矩阵的简化表示。有限元方法无法直接模拟结构阻尼特性,因此使用模态阻尼比的经验值:将结构模态阻尼比取0.004,用于隔振的桁架处模态阻尼比取0.05。
建立整星的有限元模型如图2所示,其中共有约20 000个节点和20 000个单元。模型中将承力筒、太阳电池阵及其他蜂窝板简化为复合材料板单元,动量轮安装板等金属结构简化为板单元,加强筋和对接框等加强结构简化为梁单元。整星有限元模型的边界条件定义为自由-自由,模拟卫星在轨飞行状态。
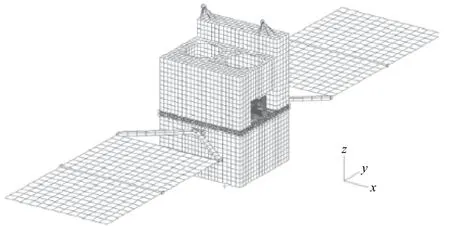
图2 整星有限元模型Fig.2 FE model of the satellite
2.2 控制系统建模
控制系统在结构动力学传递特性上增加了闭环回路,限制了结构系统3个转动方向的刚体自由度,其作用相当于增加了一个高通滤波器。控制系统作用下,扰动低频段的能量将受到限制,结构中高频段响应成为影响系统性能的主要因素。因此,研究微振动对相机视轴的影响,必须考虑控制系统的作用。在仿真分析中姿态控制近似为3个平行的PD二阶滤波器,其模型[12]可表述为

式中:Kp和Kd分别为微分和比例增益;ξl和ωl分别为滤波器的阻尼比和转折频率,ωl在基频的1个倍频程之下。通过坐标转换后可获取整星机械坐标系下的控制系统模型。上述模型基本可全面反映控制系统对整星指向的影响。
写成状态空间的形式:

其中:qc是状态变量;u是控制模型输出的控制力矩;Ac是系统矩阵;Bc是输入矩阵;Cc是输出矩阵;Dc是与输入相关的输出矩阵。
2.3 光学系统分析与建模
对该卫星,微振动主要影响2台光学相机的成像质量,具体为:
1)微振动造成光学相机内部光学器件(主镜、二镜、折镜等)间相对运动,主要表现为视轴(line-of-sight, LOS)晃动以及不同视场LOS相对晃动;
2)微振动导致航天器姿态小幅变化,也表现为LOS晃动;
3)微振动造成光学相机主镜等光学元件镜面振动,主要表现为面型的波像差增大。
从目前研究成果看,LOS晃动主要影响图像质量,不同视场的LOS相对晃动会造成图像畸变。微振动能量很小,光学相机主镜等光学元件刚度很大,且与承力结构相连,并有应力卸载环节,因此微振动对镜面面型的影响十分微小,可不予考虑。此外,航天器姿态变化带来的LOS晃动,可利用控制系统的姿态稳定度指标进行约束,因此,本文重点分析微振动造成光学相机内部光学器件相对运动带来的LOS晃动,主要分析由于中心视场LOS晃动造成的图像质量下降以及不同视场LOS相对晃动造成的图像畸变。
本文中,LOS定义为:将主镜、折镜等光学组件等效为一个透镜,在某视场上一理想物点通过该透镜在焦平面上成像,物点与像点的参考球球心之间的连线即LOS;LOS晃动定义为:微振动令光学组件在其理想位置附近往复运动,造成像点随着光学组件运动而在焦平面上运动,相机照相期间,所有积分时间内任意时刻的LOS与理想状态下LOS之间夹角的最大值与最小值之差(峰-峰值)即LOS晃动指标。
根据线性光学理论可推出如下将光学元件振动与光学系统LOS晃动联系起来的数学模型[13-14]:
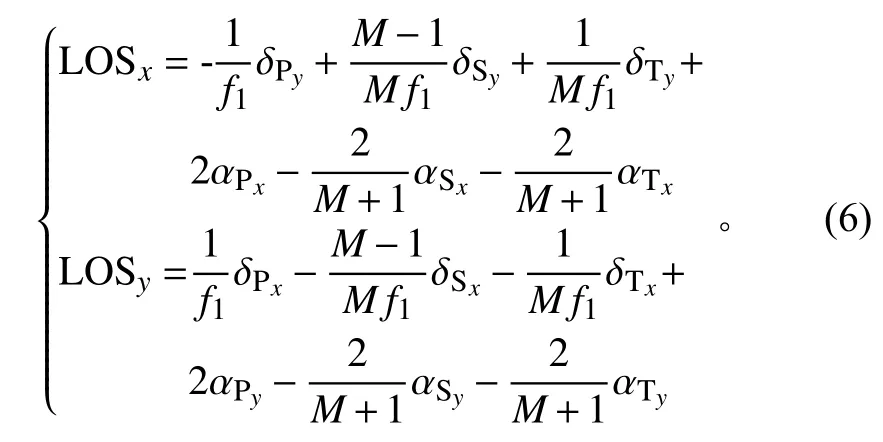
式中:LOSx和LOSy分别为视轴在焦面x和y方向晃动角度;δ为平动;α为转动;下标P、S和T分别表示主镜、辅镜和三镜;f1和M分别为光学系统的焦距和放大倍数。光学系统中的主镜、辅镜和三镜及坐标系定义如图3所示。

图3 光学系统模型Fig.3 Optical system model
由式(6)确定式(3)中与z相关的矩阵。
2.4 集成建模
将式(3)写成状态空间形式:

将结构传递模型和光学系统模型集成在一起,形成结构-光学模型;再通过公式
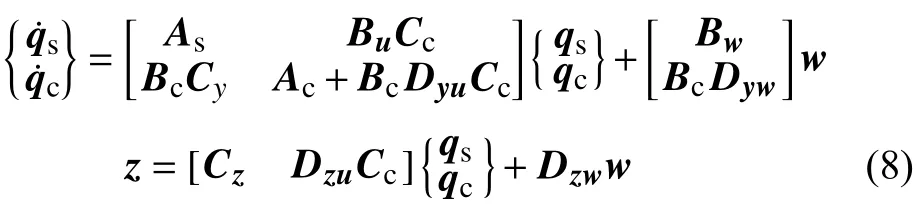
将控制系统模型与结构-光学模型集成在一起,形成结构-光学-控制模型。该模型的输入是微振动源产生的力和力矩,w;输出是光学系统的光学性能,z。
3 仿真分析
3.1 仿真分析工况
结合卫星成像工作模式及微振动源起作用的状况,确定分析工况。RW和SADA在成像期间始终工作;数传天线在实时成像实时数传的模式下是成像期间工作,否则成像期间不工作;CMG仅在卫星姿态机动过程中工作,而该卫星没有实时机动实时成像工作模式,故成像期间CMG为待工作状态。CMG待工作状态下高速转子绕高速轴转动,低速轴锁定。
综上,该卫星需要考虑的组合工作模式如表1所示。

表1 微振动源组合模式Table 1 Modal analysis of micro-vibration
根据第2节方法分别建立仿真分析的数学模型。其中:公式(4)中滤波器的阻尼比和转折频率分别取0.707和0.04 Hz,微分和比例增益分别为6.27 N/(m·s)和1.78 N/m;光学模型中焦距为7.8 m,放大倍数为21.3。将有限元模型得到的频率和振型矩阵导入MATLAB,然后根据上述参数和公式建立系统数学模型,利用MATLAB线性系统求解函数求解。根据光学系统给出的指标要求,相机LOS晃动不超过0.035″。
3.2 仿真分析结果
3.2.1 不同微振动源单独作用时的影响
假设仅有一种微振动源工作,研究不同微振动源单独作用时对LOS晃动的影响,计算结果如表2所示,其中:LOS1和LOS2分别表示第1台和第2台相机的LOS晃动;下标x和y表示相机焦平面的方向,对图像而言,x和y分别为整星机械坐标系x向和y向。

表2 不同微振动源对 LOS 晃动的影响Table 2 Influence of different micro-vibration sources on LOS jitter
从表2可见,4种微振动源单独作用时,CMG对LOS的影响最大,其次为RW,再次为数传天线,最后为SADA。从分析结果看,SADA、数传天线和RW正常工作均不影响成像质量,而CMG正常工作时会影响光学系统成像质量。
3.2.2 微振动结构传递特性
微振动结构传递特性从两方面考虑:一是不同微振动源安装位置对LOS的影响;二是微振动经过结构传递,在不同位置的响应变化。
首先仅使用1个CMG作为微振动源,将其分别放在动量轮安装板和相机安装板(铸镁底板)上,对应远离相机和接近相机两种情况,研究这两种情况下的LOS晃动,结果如表3所示。可见,微振动源越靠近相机,其对LOS影响越大。因此在构型布局上应尽量使微振动源远离相机,以增加中间传递路径对微振动的衰减作用。

表3 不同部位微振动对 LOS 晃动的影响Table 3 Influence of micro-vibration in different places on LOS jitter
其次,研究相同微振动源作用下,卫星不同部位的响应。分别考虑了主镜中心点、相机主结构、承力筒顶部和动量轮安装板,结果如表4所示。可见,该卫星目前的构型较有效地降低了传递到相机的微振动响应,其中:动量轮安装板处加速度响应最大,最大约0.09g;经过承力筒传递后,微振动衰减,在承力筒顶部仅为0.009g,降低1个量级;再传递到相机主结构,响应又下降约1个量级,最大为0.001 5g。由于相机主结构和主镜刚度很大,主镜直接连接在主结构上,所以主镜中心的响应与相机主结构的响应非常接近,最大为0.001 4g。

表4 微振动造成的结构响应加速度方差Table 4 Responses of different parts of the structure
3.2.3 微振动对LOS影响的时域分析
根据表1中的4种工作模式分别进行微振动对LOS晃动影响的时域仿真分析,结果如表5所示。

表5 微振动对LOS晃动影响的时域仿真结果Table 5 Time domain simulation results of micro-vibration influence on LOS jitter in different modes
将模式1与模式4相比可知,数传天线对LOS晃动的影响很小,实照实传模式与正常照相模式相比差距不大,如果正常照相模式能满足成像要求,实照实传模式也能满足。从模式2的3种不同低速框架角位置情况对比可知,框架角为45°时LOS晃动最大。可见在卫星姿态机动到不同位置时,CMG微振动的影响不尽相同,最大可达0.35″以上,这是在姿态机动时须注意的一个问题。从模式1和模式3对比可见,太阳电池阵停转前后,卫星LOS晃动变化很小,对成像质量的影响微乎其微,仅靠照相期间停转太阳电池阵并不能显著改善微振动对成像质量的影响。综上,在卫星实际飞行各工作模式下,微振动对成像质量的影响主要是由CMG和RW引起。
3.2.4 微振动对LOS影响的频域分析
微振动对LOS影响频域分析的主要目的是分析微振动对LOS影响较大的频率,为微振动源减隔振和结构传递设计改进提供依据,分析结果如图4所示。从CMG分析结果可知,CMG对LOS影响的主要频率为100 Hz。从RW分析结果可知,主要频率分量是斜装RW基频的50 Hz、正装RW的33 Hz以及100 Hz左右的谐波。因此在进行微振动源减隔振设计时应该主要针对上述几个频率开展。从结构设计角度应该尽量避免相机的固有频率处于50 Hz和100 Hz附近,以免造成局部响应过大而影响成像质量。
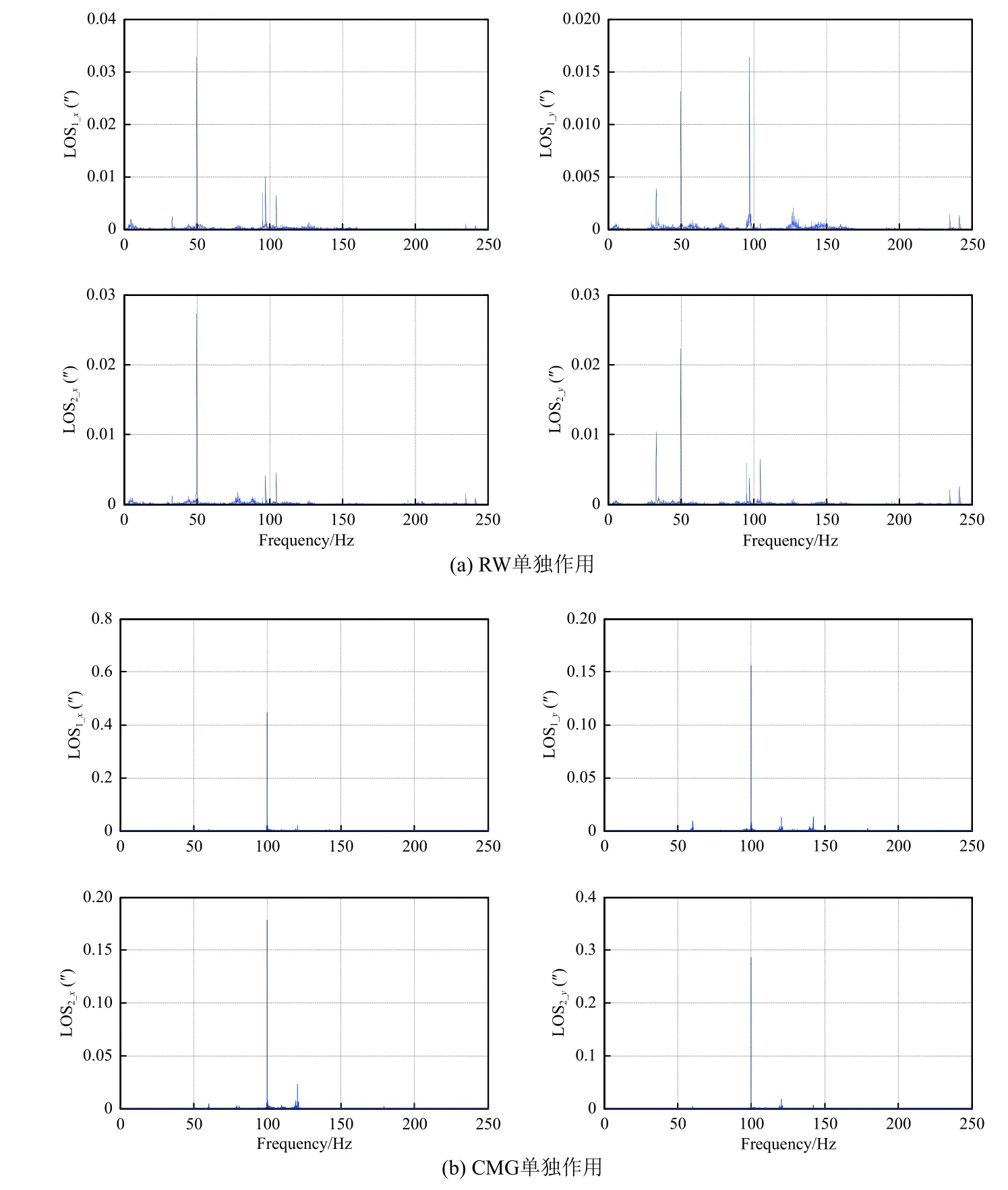
图4 RW和CMG单独作用下LOS响应的频谱Fig.4 Frequency response spectrum of RW and CMG working seperately
3.2.5 微振动对畸变的影响
该卫星相机采用TDI CCD,因此仅考虑在线阵方向上的畸变。假设所有微振动源工作,分别计算2台相机中心视场的LOS和边缘视场的LOS,通过二者之差评估微振动造成的畸变大小。分析结果如表6所示。

表6 微振动引起的畸变Table 6 Aberration resulted from micro-vibration
从表6可见,不同视场的LOS相对变化很小,因此,图像畸变相对也很小,远远小于静态情况下畸变设计的指标要求,可忽略不计。
3.3 成像质量演示
根据仿真得到的LOS时域历程,结合光学系统仿真手段可进行微振动对成像质量影响的图像仿真演示。仿真中给CMG增加了25 Hz基频的隔振器,以对比有无隔振器情况下的成像质量,结果如图5所示。两个场景中,上面一行图像均为无隔振效果,下面一行图像均为有隔振效果。可见在初始设计没有CMG隔振器的情况下,LOS晃动超出指标要求,图像出现模糊的现象;增加了CMG隔振器后,LOS晃动在指标要求范围之内,成像清晰,质量较好。

图5 微振动对成像质量影响的仿真演示Fig.5 Simulation of influence of micro-vibration on image quality
4 结论
依照卫星设计状态,分析结果表明:
1)微振动单独作用下,RW、SADA和数传天线的微振动对相机视轴的影响最大不超过0.020″,小于0.035″的指标要求,不影响光学相机成像质量;CMG微振动的影响达到0.345″,超过0.035″的指标要求1个量级左右,影响光学相机成像质量。
2)正常飞行各工作模式下,CMG、RW、SADA和数传天线组件等微振动源共同作用下,相机LOS晃动超过0.035″,会降低卫星相机成像质量,但对相机图像畸变影响不超过0.001%,可忽略。
3)微振动源中,影响最大的是CMG,必须采取隔振措施才能满足相机成像要求。从目前仿真结果看,对CMG微振动抑制至少要降低20 dB才可满足要求。
猜你喜欢
成都信息工程大学学报(2022年2期)2022-06-14
初中生学习指导·中考版(2022年4期)2022-05-12
太阳能(2021年10期)2021-11-03
太阳能(2021年10期)2021-11-03
北京航空航天大学学报(2021年7期)2021-08-13
中学生数理化(高中版.高考理化)(2021年5期)2021-07-16
上海航天(2020年3期)2020-07-01
移动通信(2019年2期)2019-03-27
发明与创新·大科技(2018年2期)2018-03-17
中学生数理化·中考版(2016年2期)2016-09-10
