1.2m望远镜跟踪架结构设计与分析
2019-03-01 08:16赵勇志王文攀段文
长春理工大学学报(自然科学版) 2019年1期
赵勇志,王文攀,段文
(1.中国科学院长春光学精密机械与物理研究所,长春 130033;2.一汽-大众汽车有限公司,长春 130011)
随着目标探测需求的进一步提高,大口径光学红外望远镜正朝着越来越大的方向发展。结构尺寸的增加导致望远镜的重量不断增加,望远镜的谐振频率不断降低。为保证望远镜系统具有较高的响应速度,伺服系统的带宽必须足够大,因此,设计一个具有高比刚度的跟踪架结构势在必行;另外,主镜口径的增大,带来了望远镜各个关键部件尺寸的大幅增加。为了降低成本和研制周期,方位轴采用了双排角接触球轴承,俯仰轴采用两对角接触球轴承作为支撑元件。这种轴承应用时,需要施加可观的预紧力,从而具有重量轻、结构紧凑及刚度好的特点。
本文从望远镜结构形式出发,根据力的传递路径,简要介绍望远镜的结构设计,并采用Matrix27单元模拟轴承性能,在ANSYS中对望远镜结构进行仿真。通过LMS模态分析仪以及扫频实验对系统性能进行验证。另外,依托于Workbench的强大流场仿真功能,研究了风载对于望远镜轴系驱动力矩的影响。
1 1.2m望远镜结构设计
1.1 望远镜轴系组成
指向、跟踪是望远镜轴系的主要功能。为实现可视天区内对目标的精确指向,跟踪架至少需要具有两维调节能力。在现有的结构中,地平式、极轴式、水平式、T形架结构以及六杆万向平台式结构是常用二维跟踪架样式。其中前三种结构形式被广泛应用于大口径光学红外望远镜结构中。这三种典型跟踪架在结构设计上区别较大,并各有优缺点。
地平式结构垂直地面的轴系称为方位轴系,水平安置且垂直于方位轴的轴系称为水平轴系(也称为俯仰轴)[1-4]。这种结构由于镜筒只在俯仰平面内运动,主镜受力情况好,结构对称易安装维护;体积小,造价低;焦点位置众多,便于放置实验终端;承载对称且工况单一,轴承支撑可靠性高;在俯仰坐标系下即可完成对大气、弯沉等误差的修正。但其具有天顶盲区,限制了其使用场合。
极轴式跟踪架也有两个轴,分别为极轴和赤纬轴。其中极轴平行于天轴指向北极,当速度与地球自转速度一致时,可实现对恒星的稳定成像,且无天顶盲区,降低了对控制系统的要求。但结构不对称,纬轴支撑刚度低,在大口径系统中的应用受到了限制。
水平式跟踪架由一根指向南北称为经轴和另一根垂直于经轴的纬轴组成。这种结构在天顶位置具有良好的跟踪能力,且这个姿态下,视宁度最好;观测恒星时,轴系速度恒定;观察赤道附近天体时,基本没有像旋。但其主镜受力工况较为复杂,可视天区受结构设计限制。
综合以上因素,在大口径光学红外望远镜中采用地平式结构方案作为跟踪架最终形式,设计效果如图1所示。

图1 1.2m望远镜简图
1.2 轴承方案
轴系形式决定了望远镜的回转性能。其中,滚子轴系的刚性较好,球轴承轴系的摩擦力矩及波动范围较小。因此,许多球轴承支撑的望远镜指向精度和jitter值好于大多数滚子轴承支撑的望远镜。为提高望远镜的平滑跟踪能力,在1.2m望远镜的方位轴系上开展了双排角接触轴承的应用研究。表1为知名望远镜方位轴系方案总结

表1 知名望远镜方位轴系方案总结
俯仰轴系的支撑形式多种多样,其中主要有以下三种主要形式:轴系一端采用端面轴承和径向轴承支撑的固定端,另一侧采用可轴向可窜动的径向轴承支撑的结构形式;使用两对圆锥滚子轴承支撑的结构形式,例如DCT望远镜;以及采用两对角接触球轴承支撑的结构形式,如TNG望远镜。1.2m望远镜俯仰轴系采用了最后一种方案。这种方案具有安装方便、刚度高、结构紧凑的特点。
2 轴承模拟方法研究
2.1 Matrix27单元简介
轴承作为跟踪架的关键回转元件,其建模方法和精度直接决定了有限元仿真结果的正确性。由于轴承中滚动体数量非常多,采用精确的接触算法会导致计算量大大增加,因此经济性非常差;而采用杆单元或者GAP单元建模必须通过试验匹配轴承的标定性能才能确定相关的参数。由于选用轴承过程中留有足够富余的余量,分析中不再关心轴承的承载能力及应力分布。因此,Matrix27单元在轴承建模中将具有巨大的优势。
Matrix27单元是ANSYS中一种通过给定相应刚度、阻尼以及质量阵定义的单元,其中刚度、阻尼以及质量阵都是12×12的对称阵。这个单元共包含有两个节点,每个节点具有六个自由度。以刚度阵的上三角阵为例,其需要幅值的元素如图2所示。

图2 Matrix27单元刚度矩阵上三角部分的赋值成分
以方位轴轴承为例,在有限元建模过程中,使用两个Mass21单元代表轴承的外环和内环。然后使用Matrix27单元建立两个Mass21之间的联系。这就能够代表整个方位轴轴承在有限元模型中刚度、阻尼以及质量贡献。
2.2 系统有限元分析
整个望远镜有限元模型如图3(a)所示,其中光学部件采用Mass单元进行模拟,并通过rbe3单元与跟踪架进行连接;跟踪架结构采用Shell181单元进行模拟,固定跟踪架底部的24个螺钉位置,对其进行模态分析。

图3 GSSMP模态分析结果
为评价结构的刚度,前期使用ANSYS软件对GSSMP进行了详尽的有限元仿真分析。有限元模型如图3(a)所示。经过计算,可得系统的前三阶谐振。其中,第一阶固有频率为21.3Hz,振型为转台左右摆动,如图3(b)所示;第二阶固有频率为22.4Hz,振型为转台前后摆动如图3(c)所示;第三阶固有频率为42.4Hz,振型为俯仰轴的变形,如图3(d)所示。
3 实验测试
电控系统的控制对象为方位轴与俯仰轴系的转动。因此,需要对这两个轴系进行扫频实验,以确定系统在这两个方向上的响应。方位轴扫频结果如图4所示。结果显示,系统在方位转动方向上的第一阶谐振频率约为20.8Hz,满足设计指标。

图4 俯仰系晃动误差曲线

图5 LMS中冲击响应计算结果
同样,采用锤击法对系统进行了模态测试实验。数据处理在Polymax中进行,结果如图5所示。结果显示,望远镜系统第一阶谐振频率约为18.5Hz,第二、三、四、五阶谐振频率依次为26.7Hz、36.9Hz、39.4Hz以及49.4Hz。这一结果与有限元分析结果吻合较好。
4 望远镜流场下仿真
风载对望远镜跟踪架两个轴系的影响是不可忽略的。作为影响驱动电机输出力矩的主要误差源,分析和探讨风载的影响是非常重要的。本文使用CFD研究了风载对1.2m望远镜的影响。建模主要包括以下部分:外界流体、望远镜塔台、望远镜方位轴、俯仰轴以及镜筒。整个流场尺寸为80m×16m×8m(仿真结果只取望远镜附近区域)。

图6 流体速度分布图
流体入口速度设置为15m/s,湍流强度设置为5%。250s仿真结束后,流场内流体的速度分布如图6所示。可以看出,流体经过望远镜结构时,速度分布受到较大影响,望远镜上方流体速度明显提升,望远镜后部流体速度区域内下降明显。对望远镜方位轴表面关键点输出风压值,通过简单的积分即可得到风载引起的力矩变化。使用傅立叶变换后,风载引起的力矩PSD如图7所示。
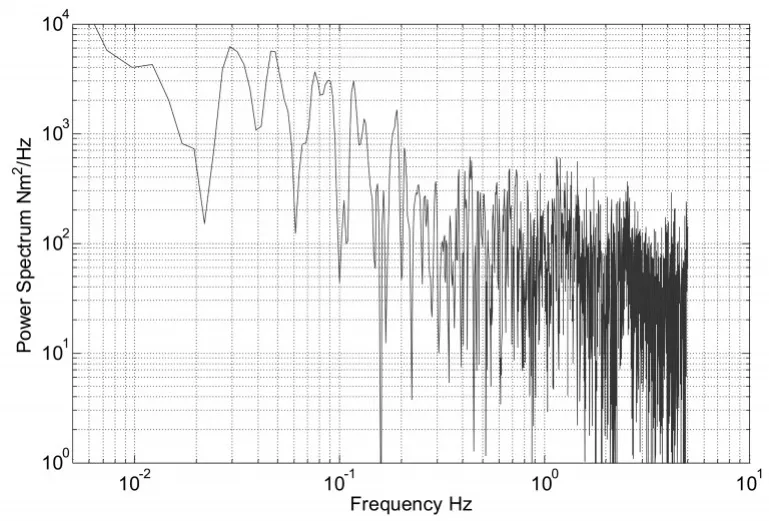
图7 风载对方位轴力矩变化的功率谱
根据结果可知,风载对方位轴力矩的影响在低频区域较为明显。考虑到系统的控制带宽约为5Hz,低于这一频率的扰动可由控制系统消除。因此,风载对方位轴的力矩扰动RMS可表示为:

仿真计算结果显示,由于系统控制带宽较大,风载对1.2m望远镜的影响不甚明显。
5 结论
本文以1.2m望远镜跟踪架结构为研究对象,方位轴由一个双排角接触球轴承支撑,俯仰轴由两对角接触球轴承支撑。有限元分析结果显示,这种结构具有较好的刚度性能,满足前期系统设计要求。通过扫频实验以及模态测试结果可知,轴系驱动方向上第一阶谐振频率约为20.8Hz;系统的第一阶谐振频率为18.5Hz。测试结果与前期分析吻合较好,证明Matrix27单元可以很好的模拟望远镜中轴承的刚度表现。另外,流场下分析可知,风载对望远镜驱动力矩的扰动约为3.4Nm RMS,远低于电机的力矩储备,能够正常使用。
猜你喜欢
防爆电机(2022年3期)2022-06-17
幼儿园(2021年12期)2021-11-06
船舶标准化工程师(2019年4期)2019-07-24
通信电源技术(2018年5期)2018-08-23
照明工程学报(2016年3期)2016-06-01
通信电源技术(2016年4期)2016-04-04
中国修辞(2016年0期)2016-03-20
舰船科学技术(2016年1期)2016-02-27
火控雷达技术(2016年2期)2016-02-06
船海工程(2015年4期)2016-01-05