机器视觉大视场宽景深光学系统设计
2019-03-01 08:16李京蔓向阳李琦景桂芬郭金明
长春理工大学学报(自然科学版) 2019年1期
李京蔓,向阳,李琦,景桂芬,郭金明
(长春理工大学 光电工程学院,长春 130022)
随着自动化产业的蓬勃发展,机器视觉技术在产品质量检测方面得到广泛应用。机器视觉应用系统的关键技术主要涉及到光源照明、光学镜头、图像信号处理以及执行机构等。光学镜头作为机器视觉的核心部件,扮演着眼睛的功效,因此镜头的成像质量至关重要。在大规模的工业生产中,机器视觉替代人工视觉可大大提高产品质量和生产效率。工业检测中,复杂部件的非接触精密检测对检测镜头的要求很高,针对产品尺寸、缺陷,为实现产品的三维成像、消除测量误差,本文采用远心结构进行设计。
目前,最先进的机器视觉技术仍然由欧美、日本等国家掌握,德国、日本和美国等发达国家双远心镜头的设计比较成熟;中国正处于技术转型时期,对机器视觉技术有着极大的需求,虽然双远心系统已经有广泛的应用,但针对于机器视觉的镜头设计少之又少,大多是引进国外产品,国内在此处有很大一部分空缺[1-3]。
本文针对待检零件的需求,设计了一套大视场宽景深光学系统。要求工作波段可见光范围为480~660nm,最大视场为180mm,景深达到80mm,系统畸变低于0.05%,为实现对零件清晰成像,要求光学系统的调制传递函数在全视场150lp/mm处大于0.3;根据光学系统的分辨率需求,选择型号为MER-125-30UM/UC的2/3英寸CCD,相机分辨率为1292×964,像素尺寸为3.75μm×3.75μm。
1 远心系统成像原理
与普通镜头相比,采用双远心镜头作为机器视觉的光学系统是为了消除由于被测物体(或CCD芯片)离镜头距离的远近不一致,造成放大倍率不一样,即不同大小的目标因为物距的影响而看起来相同,对于图像测量是不利的,必需消除。远心镜头则能允许一定程度的距离改变,在“限定景深”或“远心度区间”,像不会因物体与镜头间距离的改变而放大或缩小。但是因为只有与光轴平行的光束才会被接收,因此远心镜头通光口径必须大于或等于被摄物体的直径,所以用于大型零件表面检测的镜头口径也很大。
远心系统分为物方远心和像方远心;如图1(a)所示为物方远心光路,孔径光阑设置在物镜的像方焦平面上,物方主光线平行于光轴可看作来自于无穷远处,即物距变化,像距也都发生变化,但像高不变,测得的物体尺寸不会变化,可以消除物方由于调焦不准确带来的读数误差;图1(b)为像方远心光路,孔径光阑位于镜头的物方焦平面处,此时像方主光线平行于光轴可看作无穷远,这样可以消除像方调焦不准引入的测量误差。双远心系统则是综合了物方远心和像方远心的双重作用,消除上述可能出现的测量误差,实现对待检零件的精密测量、高精度检测,如图1(c)所示。

图1 光路原理图
2 远心系统光学设计
2.1 设计指标
针对被检零件尺寸、缺陷等具体客观特征,为达到清晰成像,对零件进行精密测量的效果。对机器视觉的光学系统提出如下设计参数,表1所示。

表1 系统参数
系统的放大倍率是保持不变的,其计算公式:

式中,y为物高;y′为像高;由上式可计算出系统的全像高为11mm。
系统分辨率是通过光学系统后可以重新产生清晰影像能力的量度;这也是选择CCD的一项重要指标,它决定了镜头基本的解像力。分辨率通常以lp/mm的数量表示,公式如下所示:

根据系统的分辨率及像高尺寸,本文选用型号为MER-125-30UM/UC的2/3英寸CCD作为光学系统的图像接收器件,相机分辨率为1292×964,像元尺寸为3.75μm×3.75μm接口为C口。
由于像面上接的是CCD相机,需要留有一定的后截距。一般C接口的CCD相机的安装距离为17.526mm,为了便于装调,又不至于使前组承担太大的光焦度,因此在本设计中取后组焦距20mm,前组焦距为,在双远心光路中有

系统景深是可以成清晰像的物空间深度;景深越大,成像的空间深度越大。景深的大小与系统的对准平面位置及入瞳直径有关。景深计算公式为

式中,ΔP1、ΔP2分别系统的前后景深;2a为入瞳直径;P为对准平面至入瞳距离;ε为人眼极限分辨角。
2.2 选择初始结构
双远心系统光阑位于系统中心,结构近似对称。通过查阅光学设计手册,选择合适的初始双远心系统,如图2所示,系统由10片镜片组成,根据表1给出的设计参数对初始结构做进一步优化设计[4-5]。

图2 双远心系统初始结构
2.3 系统优化设计
光学系统一般不可能完善地矫正像差,所以每个系统都有允许的像差存在,本文中双远心光学系统,视场大孔径小,球差和轴向色差一般不大,所以主要矫正影响成像清晰的轴外像差,如慧差、像散、垂轴色差最重要。虽然畸变不影响清晰度,但是该光学系统用于零件表面检测,所以要严格控制畸变。对光学系统的像差计算分析,公式(5)为初级像差一般表达式中的五个塞得和数[6-9]:

单个折射面的初级位置色差表达式(6)应用于每一个折射面,然后求和得到对于整个光学系统的初级位置色差的表达式为(7)式
式中,CI称为初级位置色差的分布系数,表征了各个折射面产生的对于该系统总的位置色差的贡献量。
整个光学系统的初级倍率色差的表达式为

式中,CII为初级倍率色差分布,为光学系统的初级倍率色差系数,它表征了整个光学系统的初级倍率色差。
光学系统中弯月厚透镜可以对场曲进行矫正,弯月厚透镜的∑SIV由下式表示:

式中,J2和(n-1)/n总为正值。故当r1<r2时,SIV为负值;说明弯月厚透镜在给定正光焦度时,随着厚度的不同,所产生的可以为负值,零或者正值。所以依靠厚透镜的结构变化可以校正场曲SIV,利用薄透镜的弯曲可校正畸变SV,改变两块厚透镜之间的距离可以校正像散SIII,在厚透镜中引入一个折射率相同而阿贝常数不同的玻璃构成胶合透镜,可以校正色差CI。
根据上述设计思路,对初始系统进行优化设计,在设计过程中设置透镜组的曲率半径、厚度、空气间隔为变量,设定优化函数为wavefront;由于双远心光学系统是应用于表面质量检测,所以要保证检测的精度,这对光学系统的畸变要求比较高,因此在优化成像质量中要加重控制畸变的操作数DIMX的权重[10],控制中心视场到边缘视场的畸变量;双远心系统中另一个重要的性能指标是远心度,所谓的远心度就是用来衡量物方主光线和像方主光线与光轴平行程度的参量,远心度的作用就是无论像或者物体的位置怎么变,放大率是保持不变的;设置系统参数保证物方远心;利用操作数RANG控制系统的像方主光线远心度,使像面上各个视场的主光线与光轴平行。
根据实际玻璃材质,结合现有的玻璃使用要求,有目的选择性价比高,且有利于像差矫正的优质玻璃组合。
利用ZEMAX光学设计软件中默认优化函数并在优化函数编辑器中添加着重优化的操作参量,经过一系列的优化后,最终得到满足设计参数的双远心系统的光学结构图,如图3所示。
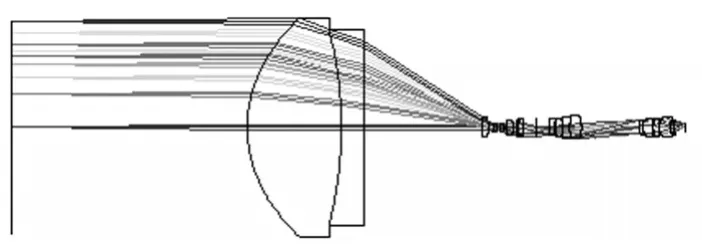
图3 双远心光学系统结构图
该光学系统由17组镜片组成,工作距离为200mm,入瞳直径为5mm,最大视场180mm,像高11mm,系统总长为372mm。
3 像质分析
优化完成后开始对整个系统的成像质量及像差进行分析:调制传递函数(MTF),是光学系统成像质量的综合评价函数。反映的是各种不同频率的正弦强度分布函数经光学系统成像后,其对比度(即振幅)的衰减程度,它可以全面的看出光学系统的成像性质;经设计优化后的双远心光学系统的传递函数曲线如图4所示,图4(a)为系统MTF&Field,横坐标为Field,纵坐标为MTF值,不同曲线表示不同的空间频率数值,由图可知该双远心系统在全视场内150lp/mm处MTF值大于0.3;从图4(b)可知系统传递函数曲线接近衍射极限,由此可见光学系统的成像质量良好,符合设计要求。

图4 光学系统传递函数
远心度作为双远心光学系统特有的衡量指标,对于系统测量精度有非常大的影响。远心度可以保证系统放大倍率不变,从而使物体在一定的景深范围内,成像大小保持不变,这样就确保了系统的测量精度。所以远心度越小,测量的误差就越小。系统各个视场的远心度数值如图5所示,最大的远心度<0.1o,从系统的设计参数表1可知,该设计满足镜头设计要求。

图5 像方各视场远心度
图6为系统的场曲和畸变图,系统存在场曲时,成像位置在视场周围出现偏移,如果焦点对准像的中心,像的周围会出现模糊。从图6可知,该系统的场曲在<0.1%,可知系统的场曲不影响像质;畸变是一种系统轴外像差,它不会影响系统成像像质的清晰度,但是会使物体的成像产生变形。因为双远心镜头用于检测系统中,因此对畸变有非常高的要求,必须将畸变限制在一定的范围内使其趋近于零。从图6中可以看出系统的畸变小于0.05%,而从ZEMAX软件的系统文件中得知,系统的最大畸变实际上只有0.045%,符合设计所要求的低于0.005%,满足设计需要。

图6 场曲和畸变图
图7为包围圆能量图,可以看出边缘视场的光源能量集中,可得到清晰图像。

图7 包围圆能量图
点列图的分布可以近似像点的能量分布,利用这些点的密集程度能够平衡成像质量的好坏,图8是系统点列图,由图可知系统弥散斑在中心视场、0.707视场和边缘视场处几乎在艾里斑范围内,已知选用的2/3英寸CCD像元尺寸为3.75μm×3.75μm,从图中可以看到最大成像光斑尺寸为2.446μm,小于CCD像元尺寸,表示通过此镜头拍摄物体时,边缘视场不会很模糊而中心视场成像十分清晰,满足成像要求。
经上述分析,可知该双远心光学系统成像质量良好,符合设计要求[11]。

图8 点列图
4 系统公差分析
光学系统的设计完成之后,必须对光学元件的公差对系统像质的影响进行分析,从而制定元件的加工容差[12]。由于在对光学元件进行机加工和系统装校的过程中,都会不可避免地产生误差,并且每个系统参数的误差对系统性能的影响也不一样。一个好的光学系统不仅是在光学设计阶段将各项像差优化到一定范围内,还必须考虑在光学零件加工和装配过程中的公差范围。通过以上分析可以看出,该镜头理论像质的评价已经完全满足设计目标,并留有一定余量。
利用ZEMAX软件对所设计的镜头进行公差分析,本文中主要针对镜片的曲率半径偏差、面偏差和物镜各面间的间隔偏差为研究对象,将系统的MTF值作为公差敏感度,用灵敏度分析及蒙特卡罗分析进行公差分析,最终得到所有透镜的厚度公差为±0.02mm,各表面曲率半径公差为0.01mm,各面的间隔公差为0.02mm,各表面的偏心公差为±0.02mm,倾斜公差为±0.2°,满足现有的加工水平。
5 结论
根据机器视觉检测中的实际需要,考虑到被检测物体尺寸、表面形状复杂以及在实时检测过程中出现的位置波动,设计了一款大视场宽景深的双远心成像系统,双远心光学系统是图像检测系统较理想光路,不仅系统畸变很小,而且还可确保视场内放大倍率的一致,消除测量误差,可以很好地解决动态在线测量问题和被测物体特征不在同一平面的问题,提高测量精度。
本文根据使用需求,设计的一款双远心光学系统最大检测视场达到180mm,工作距离200mm,景深达到80mm,系统的最大畸变小于<0.05o,调制传递函数在全视场150lp/mm处大于0.3,远心度最大值控制在0.1o内,系统很好的校正了色差、球差、场曲和畸变,像质优良,达到了机器视觉光学镜头的应用要求,可实现对复杂零件的实时检测。本文中给出的公差分析结果,这结果对于加工装配有一定的参考价值。实测结果表明,该光学系统的测量误差在允许的范围内,符合测量要求。
猜你喜欢
现代电子技术(2022年18期)2022-09-17
宝钢技术(2022年2期)2022-07-09
成都信息工程大学学报(2021年4期)2021-11-22
科学技术创新(2021年25期)2021-09-11
温州大学学报(自然科学版)(2019年1期)2019-03-30
中国医疗设备(2019年1期)2019-01-15
时代汽车(2018年2期)2018-05-31
摄影之友(影像视觉)(2017年1期)2017-07-18
航天返回与遥感(2011年6期)2011-10-11
数码摄影(2009年8期)2009-10-14