
浅析纯电动汽车的整车控制器
2019-02-27 09:30南京交通技师学院宋云波
汽车维护与修理 2019年24期
南京交通技师学院 宋云波
整车控制器是纯电动汽车的核心控制器件,相当于电动汽车的大脑,是电动汽车上全部电气的运行平台,其性能对整车的安全性尤为关键,同时也直接影响其他电气性能的发挥,是整车性能好坏的决定性因素之一。目前,现有维修资料及院校教材对整车控制器深入介绍的很少,导致广大维修人员及院校师生在工作和学习中缺乏理论参考,本文主要针对整车控制器功能、控制策略、设计过程等方面进行解析,供维修和学习人员参考。
整车控制器(VCU,Vehicle Control Unit),即动力总成控制器,有的车辆以单独的模块运行,如北汽新能源车;有的与车身控制器集成,如比亚迪;有的与电池控制器BMS或电机控制器集成,如微型共享电动汽车。
1 纯电动汽车整车控制器结构与功能
1.1 整车控制器的结构
整车控制器结构上由金属壳体和PCB线路板组成,功能上由主控芯片及其周边的时钟电路、复位电路、预留接口电路和电源模块组成最小系统。在最小系统以外,一般还配备数字信号处理电路、模拟信号处理电路、频率信号处理电路、通讯接口电路(包括CAN通讯接口和RS232通讯接口)。
1.2 整车控制器的功能
整车控制器采集加速踏板信号、制动踏板信号及其他部件信号,并做出相应判断后,控制下层的各部件控制器的动作,可实现整车驱动、制动、能量回收等功能,电动汽车整车控制系统框图如图1所示。主要功能如下。
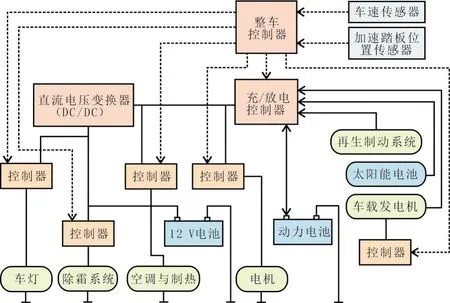
图1 整车控制系统框图
(1)整车驱动控制。接收、处理驾驶人的驾驶操作指令,并向各个部件控制器发送控制指令,使车辆按驾驶人意愿行驶。
(2)能量管理功能,如充电和放电回收。
(3)整车辅助系统控制,如电动空调、暖风等控制。
(4)整车安全管理和诊断功能,如预警和故障干预。系统故障的判断和存储,动态检测系统信息,记录出现的故障。对整车具有保护功能,根据故障的类别对整车进行分级保护,紧急情况下可以关闭发电机及切断母线高压系统。
(5)整车网关的管理功能,实现新能源CAN和车身CAN交互。与电机、DC/DC、蓄电池组等进行可靠通讯,通过CAN总线以及关键信息的模拟量进行状态的采集输入及控制指令的输出。
(6)整车信息管理功能,如仪表显示、远程监控等。接收处理各个零部件信息,结合能源管理单元提供当前的能源状况信息。
(7)高低压安全管理与保护功能。根据故障的类别对整车进行分级保护,紧急情况下可以切断母线高压系统。
2 整车控制逻辑和策略
2.1 整车控制逻辑
纯电动汽车整车控制节点包括:电机控制器、电池控制器、充电控制器、空调控制器、仪表控制器、真空泵、风扇控制器等,其控制逻辑如图2所示。一级控制为整车控制器直接控制。其中电机控制器、电池控制器、充电控制器、空调控制器、仪表控制器通过CAN网络通讯传输控制指令;真空泵、风扇控制器直接通过普通导线传输控制指令,为硬线控制。
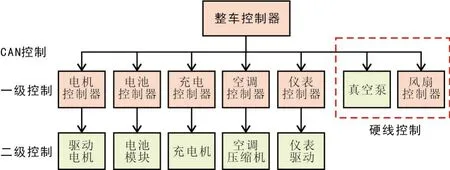
图2 整车控制逻辑
2.2 整车控制策略
(1)整车状态的获取,主要内容如下。
1)点火钥匙状态为OFF、ACC、ON、START。
2)充电监控状态为充电唤醒或充电连接状态。
3)变速器挡位状态为P、R、N、D。
4)加速踏板位置(加速踏板开度为0%~100%)。
5)制动踏板状态为踩下制动踏板或未制动。
6)电池控制器中继电器、电压、电流等状态。
7)MCU工作模式、转速、扭矩等状态。
8)EAS、PTC状态信息。
9)ABS 状态、ICM状态等。
(2)驾驶人的意愿识别和控制模式的判断。纯电动汽车整车有2种工作模式,即充电模式和行驶模式。整车控制器有低压唤醒后,周期执行整车模式的判断,其中充电模式优先于行驶模式。
充电模式:充电唤醒信号,(快慢充)充电门板信号或连接确认信号。
行驶模式:点火开关置于ON位时,无充电唤醒信号,无充电门板信号或连接确认信号。
纯电动汽车工作模式的切换:充电模式不能切换到行驶模式,当点火开关处于ON位并充电时,此时关闭充电口,车辆不能上高压,需要驾驶人将点火开关打到非ON位,并再次转到ON位方可上电;行驶模式可以切换到充电模式,整车行驶时,如果检测有充电需求,整车控制器需要先执行高压下电后,再进行正常的充电流程。
(3)整车故障的判别及处理。整车控制器根据电机、电池、DC/DC等零部件故障、整车CAN网络故障及整车控制器硬件故障进行综合判断,确定整车的故障等级,并进行相应的控制处理。整车故障等级有四级,见表1所列。
(4)外围相连驱动模块的管理。整车控制器外围相连驱动模块控制有电池内高压主负继电器、空调系统高压继电器、冷却液泵、DC/DC、冷却风扇、电子转向助力系统、快充继电器等。

表1 整车故障等级划分表
3 整车控制器的开发流程
整车控制器的开发过程,一般会遵循V模式开发过程。V模式开发的理念是通过协同合作,使得软件设计达到高效与高质兼得的目的,具体流程如下。
(1)根据提炼出来的需求,建立数学模型,并进行模型仿真。
(2)将模型数据下载到快速原型中,用硬件接口替代原来模型中的逻辑接口。
(3)利用专业软件,生成C代码,与底层程序集成后,通过接口程序下载到整车控制器硬件中,准备进行调试。这个过程中,每个功能模块会分别进行调试。
(4)硬件在环仿真测试,利用模拟器模拟车辆运行环境,对整车控制器进行功能测试。
(5)整车控制器装车,进行实车测评,完成通讯协议标定。测评通过后,得到产品的第一个版本。
猜你喜欢
汽车实用技术(2022年15期)2022-08-19
汽车实用技术(2022年15期)2022-08-19
汽车实用技术(2022年13期)2022-07-19
汽车实用技术(2022年12期)2022-07-05
中国自行车(2022年3期)2022-06-30
电子制作(2019年9期)2019-05-30
网络空间安全(2019年8期)2019-03-18
读写算·素质教育论坛(2017年16期)2017-08-04
教育界·下旬(2016年4期)2016-11-19
科技传播(2012年10期)2012-06-06
